一种装载机自动收斗作业控制系统
本发明涉及一种装载机自动收斗作业控制系统,具体涉及装载机在铲料后,自动控制边行走边收斗的作业控制系统。
背景技术:
1、现有技术采用人工控制收斗,驾驶员同时操纵手柄和油门,手柄控制收斗,油门控制驱动,由于全凭驾驶员经验,手柄向内侧操纵收斗时,液压系统的排量变化忽高忽低,即当负载压力很大的时候,即使给再大的流量,也只是产生额外的溢流,而不会对铲掘有实质性效果,因此属于无用的功率消耗;驾驶员油门踩的时候,发动机转速也是忽高忽低,由于驱动功率随着铲掘作业的进行而发生变化,单纯的踩油门会导致收斗动作无力,同时行走和收斗动作同时进行时,导致发动机的转速的波动,转速的波动,会导致有效输出功率会降低,并且会导致流量大幅度下降,收斗速度明显变慢,铲装效率较低。同时,每天8小时的操纵手柄,手容易疲劳,胳膊也容易抽筋,在胳膊抽筋和手疲劳的情况下,继续操作车辆,铲装效率更低。
技术实现思路
1、本发明提供一种无需人工操作的自动收斗作业控制系统,属于自动驾驶和自动铲装,从而解决上述问题。
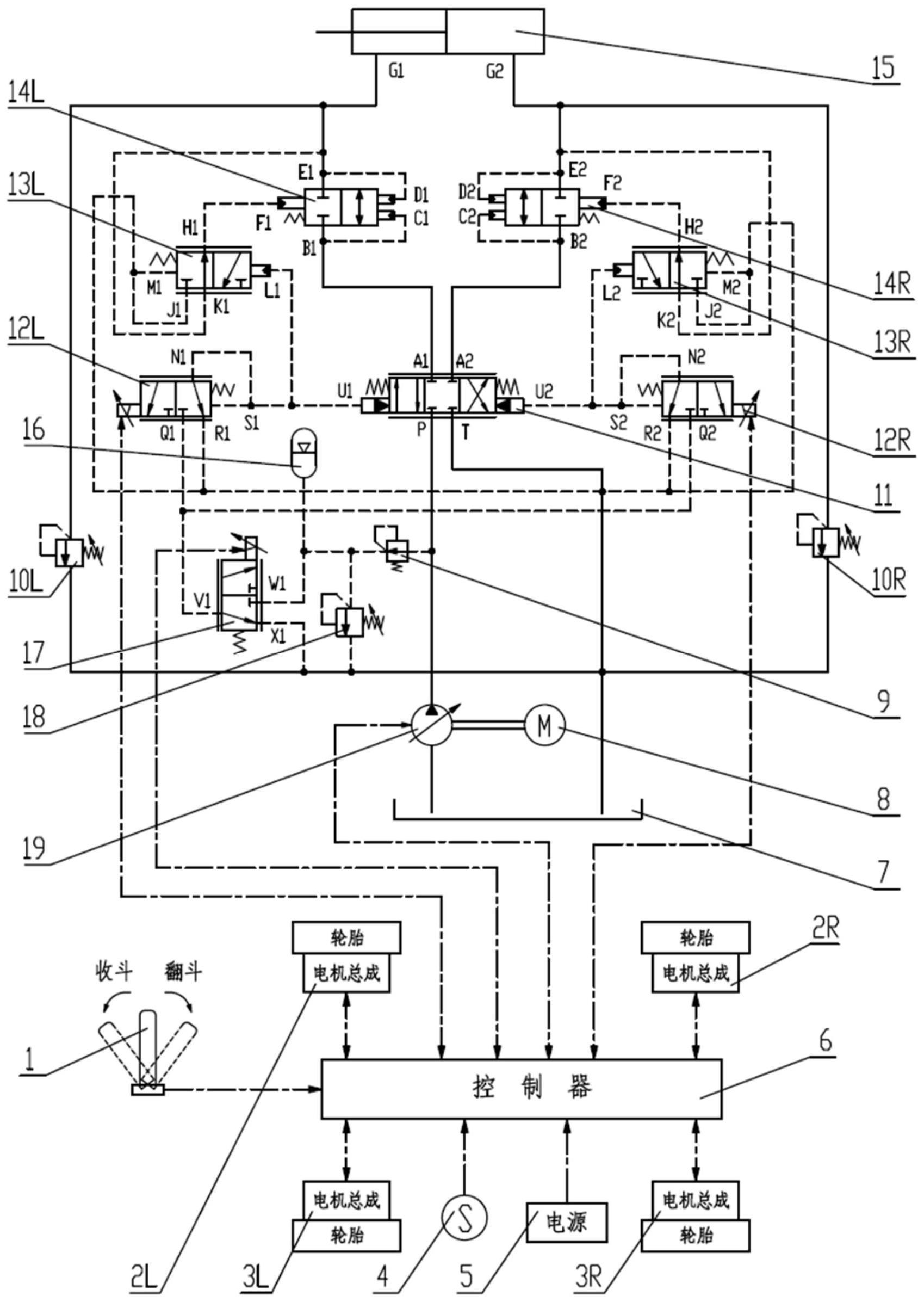
2、本发明中一种装载机自动收斗作业控制系统,该系统主要由主油路、控制油路、控制器6、手柄1和电源5组成,
3、其中主油路由电控泵19、主阀11、左截止阀14l、右截止阀14r、翻斗缸15和油箱7组成,其中主阀11为三位四通液控弹簧复位的比例阀;左截止阀14l、右截止阀14r为两端液控弹簧复位的比例阀;
4、液压油经电控泵19连接主阀11p口,主阀11a1口接左截止阀14l的b1口,左截止阀14l的e1口接翻斗缸15的g1口;翻斗缸15的g2口接右截止阀14r的e2口,右截止阀14r的b2口接主阀11的a2口,主阀11的t口接油箱7;
5、控制油路主要由蓄能器16、先导电磁阀17、左电磁阀12l、右电磁阀12r、左液控阀13l和右液控阀13r组成;其中,左电磁阀12l、右电磁阀12r均为两位三通液控弹簧复位的电磁阀;先导电磁阀17为弹簧复位的两位三通电磁阀;左液控阀13l、右液控阀13r为两端液控弹簧复位的比例阀;
6、先导电磁阀17的w1口与电控泵19联通,x1口与油箱7联通;蓄能器16与先导溢流阀17的w1口连接,先导电磁阀17的v1口同时接左电磁阀12l的q1口和右电磁阀12r的q2口;左电磁阀12l的n1口与s1口互通;左电磁阀12l的s1口同时接主阀11的u1口和左液控阀13l的l1口,左液控阀13l的k1口接左截止阀14l的e1口,左液控阀13l的h1口接左截止阀14l的f1口,左液控阀13l的j1口与m1口互通并同时接油箱7;左截止阀14l的e1口接d1口,左截止阀14l的b1口接c1口;右电磁阀12r的n2口与s2口互通;右电磁阀12r的s2口同时接主阀11的u2口和右液控阀13r的l2口,右液控阀13r的k2口接左截止阀14l的e2口,右液控阀13r的h2口接右截止阀14r的f2口,右液控阀13r的j2口与m2口互通并同时接油箱7;右截止阀14r的e2口接d2口,右截止阀14r的b2口接c2口;
7、四个驱动总成,每个驱动总成包括电机总成和轮胎,电机总成与轮胎通过减速机构机械连接,手柄1与控制器6采用can总线连接,传感器4与控制器6采用信号线连接,通过传感器4实时监测铲斗的收斗角度,电源5与控制器6采用电缆连接以及can通讯连接,控制器6与四个驱动总成采用电缆连接以及can通讯连接,左电磁阀12l、右电磁阀12r、先导电磁阀17、电控泵19与控制器6均采用信号线连接。
8、优选地,该系统还包括左溢流阀10l和右溢流阀10r,所述翻斗缸15的g1口另一路通过左溢流阀10l回油箱7;翻斗缸15的g2口另一路通过右溢流阀10r回油箱7。
9、优选地,该系统还包括减压阀9和先导溢流阀18,减压阀9设置在电控泵19与先导电磁阀17的w1口之间,减压阀9的出口通过先导溢流阀18连接到油箱7。
10、本发明中所述装载机自动收斗作业控制系统的控制方法,步骤如下:
11、1)当控制器6控制四个驱动总成驱动整机行驶至物料前时,控制整机以最大驱动力推物料,直至驱动总成的转速为0时,停止驱动,控制器6控制手柄1向左转动一个角度,控制器6向右电磁阀12r和先导电磁阀17输出电压信号,且电压数值与手柄角度相对应,此时先导电磁阀17的v1口和w1口接通,右电磁阀12r的n2口和q2口接通;
12、2)当电控泵或翻斗缸大腔压力较高时,控制器6根据铲装的负载压力自动控制降低手柄1的角度,从而降低输入先导电磁阀17和右电磁阀12r的电压值信号,从而控制主阀11向翻斗缸15大腔的流量减小,以控制翻斗缸15的伸出速度,同时根据铲斗收斗角度的变化,向驱动系统输出功率和扭矩,实现边向前推料,边进行收斗;
13、3)当收斗角度超过20°时,自动停止驱动功率输出,仅仅进行收斗动作,直至完成收斗。
14、4)当收斗完成时,控制器控制手柄角度为0°,并向电控泵19输出0电压信号,电控泵19排量变为0,因此进行空转而无排量输出;同时向先导电磁阀17、右电磁阀12r输出0电压信号,先导电磁阀17和右电磁阀12r自动复位。
15、本发明的有益效果:
16、1.更节能:控制器实时检测电控泵的压力和流量信号,在负载压力较大时,自动输出信号,降低电控泵的排量,进而降低系统流量,减慢翻斗缸的伸出速度,可以避免人工操作的增大流量的功率损失,节能效果显著;
17、2.自动化程度更高:由于控制器可以实时根据负载的压力需求,进行动态调整电控泵和电磁阀的信号,进而调整系统流量和输出功率,同时可以根据铲斗的收斗角度调整行走输出功率,和人工操作相比,自动化程度更高,控制更为精确。
18、3.更高效:由于人工操作全凭驾驶员的经验,而驾驶员无法察觉收斗角度的精确变化,因而不可避免的会造成油门踩踏的提前或滞后,造成驱动功率有输出,但是整车行走无力或出现后轮打滑或者行走过快等,导致需要二次铲装或铲掘无力等,综合作业效率较低,而本发明的自动收斗作业控制系统,可以精确的察觉收斗角度的变化,并且行走功率的输出会依据角度变化而适时地作出向前推进物料或者停止输出功率的变化,进而提高综合铲装的作业效率。
19、4.解放了驾驶员,不存在长时间操作的手和胳膊的疲劳导致的手臂肌肉抽筋的现象。
技术特征:
1.一种装载机自动收斗作业控制系统,该系统主要由主油路、控制油路、控制器(6)、手柄(1)、电源(5)和四个驱动总成组成,
2.根据权利要求1所述的装载机自动收斗作业控制系统,其特征在于,该系统还包括左溢流阀(10l)和右溢流阀(10r),所述翻斗缸(15)的g1口另一路通过左溢流阀(10l)回油箱(7);翻斗缸(15)的g2口另一路通过右溢流阀(10r)回油箱(7)。
3.根据权利要求2所述的装载机自动收斗作业控制系统,其特征在于,该系统还包括减压阀(9)和先导溢流阀(18),减压阀(9)设置在电控泵(19)与先导电磁阀(17)的w1口之间,减压阀(9)的出口通过先导溢流阀(18)连接到油箱(7)。
4.根据权利要求1所述装载机自动收斗作业控制系统的控制方法,其特征在于,该方法的步骤如下:
技术总结
本发明提出一种装载机自动收斗作业控制系统,针对现有人工控制收斗,驾驶员同时操纵手柄和油门来控制收斗和驱动,当负载压力很大的时候,过大的流量会产生额外的溢流,产生无用的功率消耗;由于驱动功率随着铲掘作业的进行而发生变化,单纯的踩油门会导致收斗动作无力的问题。本发明通过控制器实现行走控制,并通过控制手柄角度控制电控泵、先导电磁阀、左电磁阀和右电磁阀线性的控制主阀的开度,进而控制翻斗缸的伸出或缩回的速度。通过传感器实时监测铲斗的收斗角度,进而在负载压力减小的时候,对驱动功率增加输出,而在铲斗收斗角度超过一定值时,停止驱动功率的输出,直至收斗完成。收斗作业效率更高,自动化程度更高,综合生产率更高。
技术研发人员:魏加洁,王继新,杜浩然
受保护的技术使用者:吉林大学
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!