辅具触底自动提升系统及其工作方法和挖掘机与流程
本申请涉及挖掘机,尤其是涉及一种辅具触底自动提升系统及其工作方法和挖掘机。
背景技术:
1、近年来,随着我国城镇化建设步伐的加快,对交通运输、建筑、水利工程等领域工程建设量逐渐加大,全国各地对具备物料搬运、卸货等功能的工程机械需求也越来越多。
2、目前,应用于抓料的挖掘机普遍采用机械抓合形式机具,例如莲花爪、贝壳斗等机械抓合形式的机具,抓料挖掘机在抓料过程中存在辅具触底的问题,不仅磨损辅具和存放物料的底部(如地面、车厢底面),导致辅具和物料的底部损坏。
技术实现思路
1、本申请的目的在于提供一种辅具触底自动提升系统及其工作方法和挖掘机,在一定程度上解决了现有技术中存在的抓料挖掘机在抓料过程中存在辅具触底的问题,不仅磨损辅具和存放物料的底部,导致辅具和物料的底部损坏的技术问题。
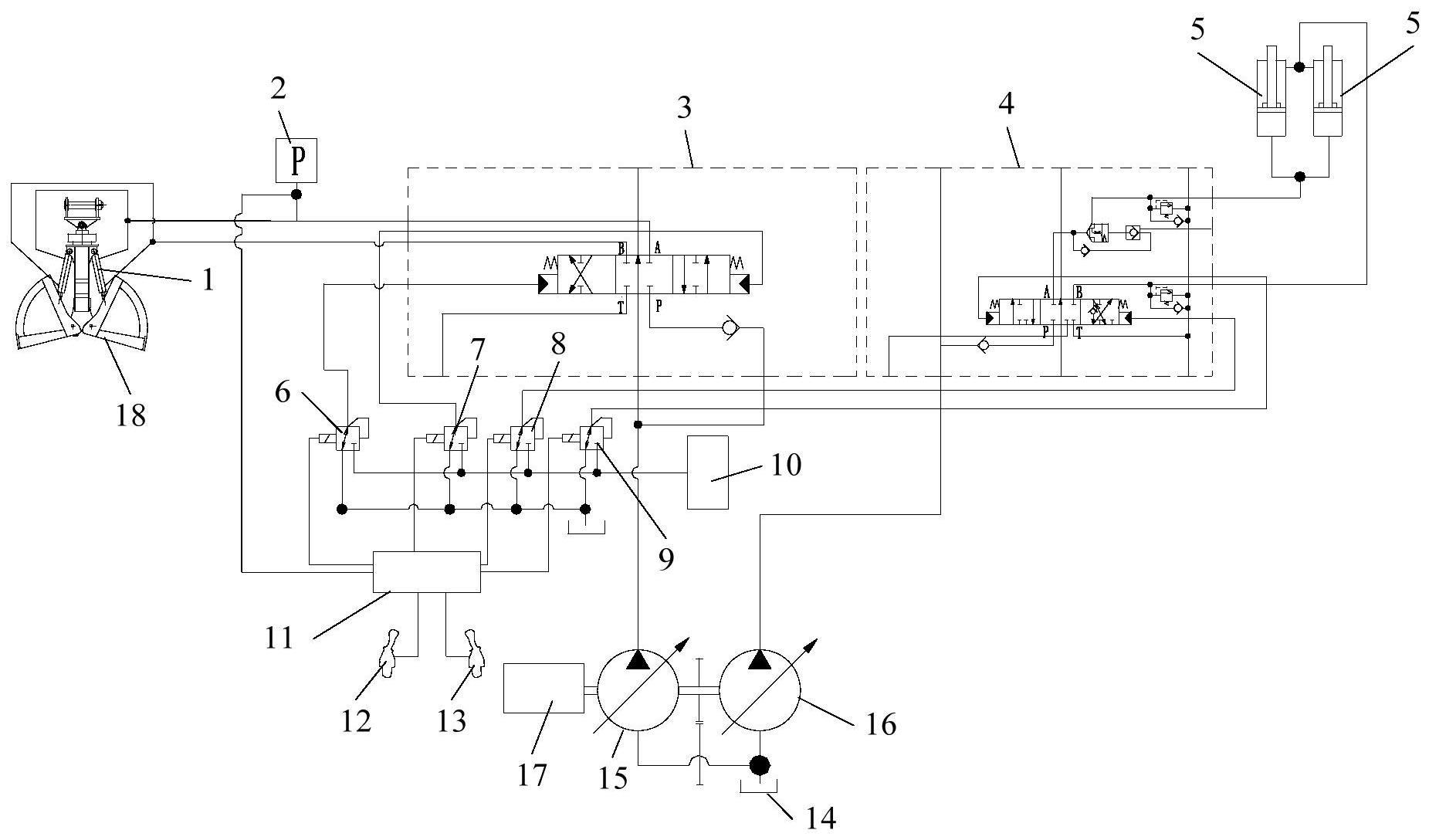
2、本申请提供了一种辅具触底自动提升系统,包括:辅具驱动装置、压力传感器、第一主阀、第二主阀、举升驱动装置、第一比例减压阀、第二比例减压阀、第三比例减压阀、第四比例减压阀、先导液压源、控制装置以及第一先导手柄;其中,所述第一主阀与所述辅具驱动装置相连接,所述第二主阀与所述举升驱动装置相连接;
3、所述第一比例减压阀、所述第二比例减压阀分别与所述第一主阀的两侧相连接,分别用于驱动所述第一主阀的阀芯移动,且所述第二比例减压阀用于控制抓取操作;
4、所述第三比例减压阀、所述第四比例减压阀分别与所述第二主阀的两侧相连接,分别用于驱动所述第二主阀的阀芯移动,且所述第四比例减压阀用于控制举升操作;
5、所述先导液压源分别与所述第一比例减压阀、所述第二比例减压阀、所述第三比例减压阀以及所述第四比例减压阀相连接;所述压力传感器与所述辅具驱动装置相连接,用于检测所述辅具驱动装置工作时的压力;
6、所述第一先导手柄与所述控制装置通信连接,操作者能够通过所述第一先导手柄向所述控制装置发出所述第三比例减压阀以及所述第四比例减压阀的动作指令;
7、所述第一比例减压阀、第二比例减压阀、第三比例减压阀、第四比例减压阀以及所述压力传感器分别与所述控制装置通信连接。
8、在上述技术方案中,进一步地,所述辅具驱动装置为油缸,且所述第二比例减压阀用于驱动所述第一主阀的阀芯运动到第一位置,以使得所述辅具驱动装置的有杆腔进油实现抓料操作,且所述辅具驱动装置的无杆腔与所述阀芯的第一位置相连通的管路上设置有所述压力传感器;
9、所述第一比例减压阀用于驱动所述第一主阀的阀芯运动到第二位置,以使得所述辅具驱动装置的有杆腔进油。
10、在上述任一技术方案中,进一步地,所述举升驱动装置为油缸,且所述第四比例减压阀用于驱动所述第二主阀的阀芯运动到第三位置,以使得所述举升驱动装置的无杆腔进油实现举升操作,所述第三比例减压阀用于驱动所述第二主阀的阀芯运动到第四位置,以使得所述举升驱动装置的有杆腔进油。
11、在上述任一技术方案中,进一步地,所述辅具触底自动提升系统还包括主液压源、第一泵体以及第二泵体;其中,所述第一主阀通过所述第一泵体与所述主液压源相连接;所述第二主阀通过所述第二泵体与所述主液压源相连接。
12、在上述任一技术方案中,进一步地,所述第一泵体以及所述第二泵体均配设有动力源。
13、在上述任一技术方案中,进一步地,所述主液压源为盛装有液压油的油箱。
14、在上述任一技术方案中,进一步地,所述辅具触底自动提升系统还包括第二先导手柄,且所述第二先导手柄与所述控制装置通信连接,操作者能够通过所述第二先导手柄向所述控制装置发出所述第一比例减压阀以及所述第二比例减压阀的动作指令。
15、在上述任一技术方案中,进一步地,所述辅具触底自动提升系统还包括支撑座、辅具以及举升臂;其中,所述举升臂的两端分别与所述支撑座以及目标物转动连接;所述举升驱动装置的两端分别与所述举升臂以及所述目标物转动连接;
16、所述支撑座与所述举升臂转动连接;所述辅具驱动装置的相对的两端分别与所述支撑座以及所述辅具转动连接。
17、本申请还提供了一种辅具触底自动提升系统的工作方法,基于上述任一技术方案所述的辅具触底自动提升系统,因而,具有该辅具触底自动提升系统的全部有益技术效果,在此,不再赘述。
18、在上述技术方案中,进一步地,所述辅具触底自动提升系统的工作方法包括如下步骤:
19、当所述控制装置检测到所述压力传感器的压力信号高于预设压力值,且所述控制装置检测到所述第二比例减压阀对所述第一主阀有输出先导压力信号时,说明辅具在进行抓料操作,同时利用所述控制装置对所述第一先导手柄上的信号进行检测;
20、若检测到有先导压力信号,说明已经人为控制举升臂进行提升操作,由于设定人为操作优先,那么此时所述控制装置不主动控制所述举升臂提升;
21、若检测到无先导压力信号,说明没有人为控制所述举升臂进行提升操作,则所述控制装置向所述第四比例减压阀输入一个电信号,所述第四比例减压阀输出先导压力油,推动所述第二主阀的阀芯移动,使得所述举升臂提升预设时间,以脱离工作面;
22、当所述控制装置检测到所述压力传感器的压力信号高于预设压力值,且所述控制装置检测到所述第二比例减压阀对所述第一主阀无输出先导压力信号,说明所述辅具的内部已抓取有物料,并且此时不再进行继续抓料的操作,同时利用所述控制装置对所述第一先导手柄上的信号进行检测;
23、若检测到有先导压力信号,说明已经人为控制所述举升臂进行提升操作,由于设定人为操作优先,所述控制装置不主动控制所述举升臂提升;
24、若检测到无先导压力信号,说明所述举升臂无动作,则判定所述辅具处于悬停的状态,此时作为干扰项,所述控制装置不主动控制所述举升臂提升。
25、本申请还提供了一种挖掘机,包括上述技术方案所述的辅具触底自动提升系统,和/或利用如上述方案所述的辅具触底自动提升系统的工作方法,所述挖掘机还包括车身,且所述举升臂与所述车身转动连接,所述举升驱动装置与所述车身转动连接。因而,本挖掘机具有该辅具触底自动提升系统和/或辅具触底自动提升系统的工作方法的全部有益技术效果,在此,不再赘述。
26、与现有技术相比,本申请的有益效果为:
27、本申请提供的辅具触底自动提升系统,解决了抓料过程中,已经触底或者抓不动,并且没有人为地对举升臂进行提升的一种情况,进而可有效减少辅具和存放物料的底部磨损,节约整机能耗。
28、本申请提供的辅具触底自动提升系统的工作方法,基于前述的辅具触底自动提升系统,因而具有其有效效果,在此,不再详述。
29、本申请提供的挖掘机,包括前述的辅具触底自动提升系统,和/或利用前述的辅具触底自动提升系统的工作方法,因而具有辅具触底自动提升系统和/或辅具触底自动提升系统的工作方法的有益技术效果,在此,不再详述。
技术特征:
1.一种辅具触底自动提升系统,其特征在于,包括:辅具驱动装置、压力传感器、第一主阀、第二主阀、举升驱动装置、第一比例减压阀、第二比例减压阀、第三比例减压阀、第四比例减压阀、先导液压源、控制装置以及第一先导手柄;其中,所述第一主阀与所述辅具驱动装置相连接,所述第二主阀与所述举升驱动装置相连接;
2.根据权利要求1所述的辅具触底自动提升系统,其特征在于,所述辅具驱动装置为油缸,且所述第二比例减压阀用于驱动所述第一主阀的阀芯运动到第一位置,以使得所述辅具驱动装置的无杆腔进油实现抓料操作,且所述辅具驱动装置的无杆腔与所述阀芯的第一位置相连通的管路上设置有所述压力传感器;
3.根据权利要求1所述的辅具触底自动提升系统,其特征在于,所述举升驱动装置为油缸,且所述第四比例减压阀用于驱动所述第二主阀的阀芯运动到第三位置,以使得所述举升驱动装置的无杆腔进油实现举升操作,所述第三比例减压阀用于驱动所述第二主阀的阀芯运动到第四位置,以使得所述举升驱动装置的有杆腔进油。
4.根据权利要求1所述的辅具触底自动提升系统,其特征在于,所述辅具触底自动提升系统还包括主液压源、第一泵体以及第二泵体;其中,所述第一主阀通过所述第一泵体与所述主液压源相连接;所述第二主阀通过所述第二泵体与所述主液压源相连接。
5.根据权利要求4所述的辅具触底自动提升系统,其特征在于,所述第一泵体以及所述第二泵体均配设有动力源。
6.根据权利要求4所述的辅具触底自动提升系统,其特征在于,所述主液压源为盛装有液压油的油箱。
7.根据权利要求1所述的辅具触底自动提升系统,其特征在于,所述辅具触底自动提升系统还包括第二先导手柄,且所述第二先导手柄与所述控制装置通信连接,操作者能够通过所述第二先导手柄向所述控制装置发出所述第一比例减压阀以及所述第二比例减压阀的动作指令。
8.根据权利要求1至7中任一项所述的辅具触底自动提升系统,其特征在于,所述辅具触底自动提升系统还包括支撑座、辅具以及举升臂;其中,所述举升臂的两端分别与所述支撑座以及目标物转动连接;所述举升驱动装置的两端分别与所述举升臂以及所述目标物转动连接;
9.一种辅具触底自动提升系统的工作方法,其特征在于,基于括权利要求3所述的辅具触底自动提升系统,所述辅具触底自动提升系统的工作方法包括如下步骤:
10.一种挖掘机,其特征在于,包括如权利要求8所述的辅具触底自动提升系统,和/或利用如权利要求9所述的辅具触底自动提升系统的工作方法;所述挖掘机还包括车身,且所述举升臂与所述车身转动连接,所述举升驱动装置与所述车身转动连接。
技术总结
本申请涉及挖掘机技术领域,尤其是涉及一种辅具触底自动提升系统及其工作方法和挖掘机,本系统辅具驱动装置、压力传感器、第一主阀、第二主阀、举升驱动装置、第一比例减压阀、第二比例减压阀、第三比例减压阀、第四比例减压阀、先导液压源、控制装置以及第一先导手柄,第一主阀与辅具驱动装置相连接,第二主阀与举升驱动装置相连接;第一、第二比例减压阀分别与第一主阀的两侧相连接;第三、第四比例减压阀分别与第二主阀的两侧相连接;先导液压源分别与四个比例减压阀相连接;压力传感器与辅具驱动装置相连接;第一先导手柄与控制装置通信连接;上述部件分别与控制装置通信连接。本系统可有效解决辅具触底的问题。
技术研发人员:苗国华,迟峰,刘淑强,王学兰,王进
受保护的技术使用者:山东临工工程机械有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!