一种增大工作角度、提高承载能力的工作臂和工程机械车
本申请属于工程机械设备,更具体地说,是涉及一种增大工作角度、提高承载能力的工作臂和工程机械车。
背景技术:
1、目前,末端执行机构广泛应用于建筑与隧道挖掘行业,工作臂机构是装载各项执行机构的主要构件。在破碎作业中,由于岩体或建筑过高,所以对于破碎装备工作臂的工作角度和承载能力的要求变的越来越高。目前的冲击振动机普遍存在工作角度不足、承载能力较差等问题,因此需要解决这些问题,才能更好地提高工作臂的工作效率。
技术实现思路
1、本申请的目的在于提供种一种增大工作角度、提高承载能力的工作臂和工程机械车,以解决现有技术中的工作臂工作角度不足、承载能力较差的技术问题。
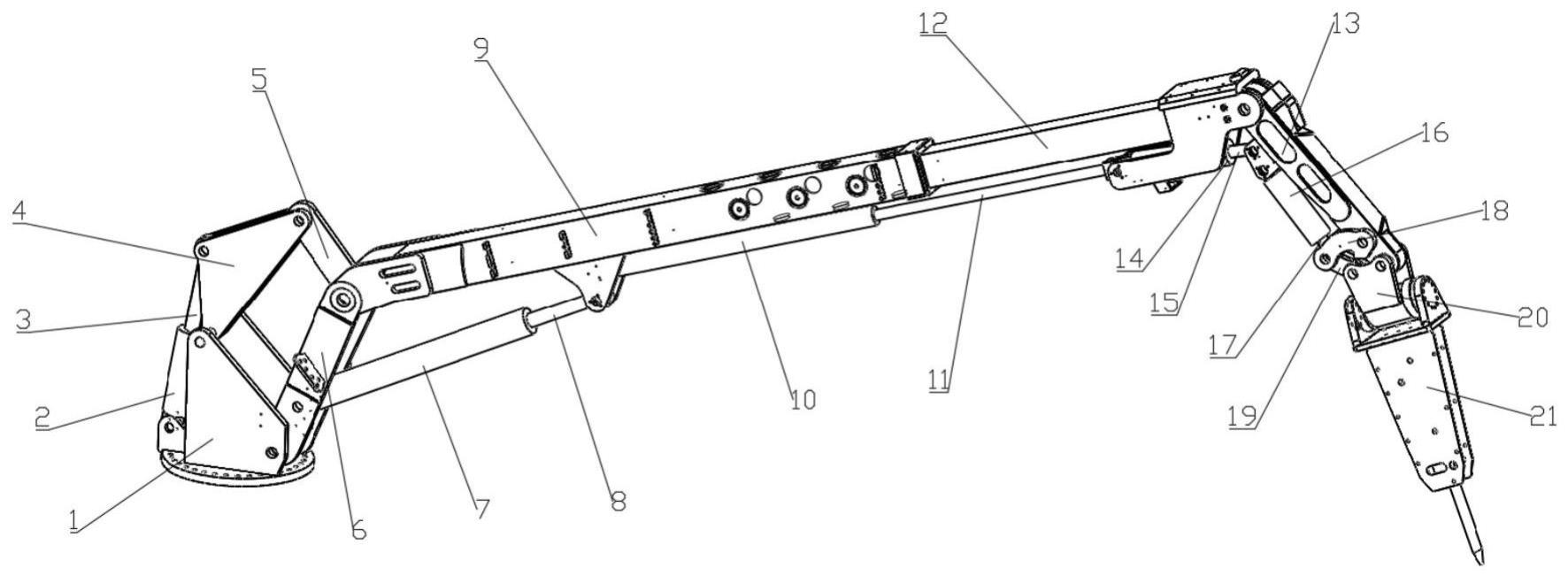
2、为实现上述目的,本申请的第一方面,提供了一种增大工作角度、提高承载能力的工作臂,包括:
3、基座;
4、连接臂,其一端铰接在所述基座上;
5、伸缩臂机构,其一端铰接在所述连接臂上;
6、末端执行机构,其一端铰接在所述伸缩臂机构的另一端上;
7、第一俯仰角调节机构,其包括第一液压缸和第一活塞杆;所述第一液压缸的一端铰接在所述连接臂上,所述第一液压缸的另一端通过所述第一活塞杆铰接在所述伸缩臂机构上;以及,
8、第二俯仰角调节机构,其包括第二液压缸、第二活塞杆、第一连接杆和第二连接杆;所述第二液压缸的一端铰接在所述基座上,所述第二液压缸的另一端通过所述第二活塞杆铰接在所述第一连接杆上,所述第一连接杆的左下端铰接在所述基座上,所述第一连接杆的右上端铰接在所述第二连接杆的一端,所述第二连接杆的另一端与所述连接臂和所述伸缩臂机构铰接。
9、进一步地,所述第一液压缸的一端铰接在所述连接臂的中间位置上。
10、进一步地,所述第一连接杆为三角形板,所述第一连接杆的三个端点分别与所述第二活塞杆、所述基座和所述第二连接杆铰接。
11、进一步地,所述基座上设有向上凸出的连接板,所述第一连接杆的左下端与所述连接板的上端铰接。
12、进一步地,所述伸缩臂机构包括:
13、第一伸缩臂;
14、第二伸缩臂,其与所述第一伸缩臂间呈移动副连接;以及
15、第三液压缸,其一端铰接在所述第一伸缩臂上,另一端通过第三活塞杆铰接在所述第二伸缩臂上。
16、进一步地,所述末端执行机构包括:
17、执行工作臂,其一端与所述第二伸缩臂的一端铰接;
18、转动油缸,其一端铰接在所述执行工作臂上;以及
19、执行部件,其一端固定连接在所述转动油缸上。
20、进一步地,还包括第四液压缸,所述第四液压缸的一端铰接在所述第二伸缩臂上,所述第四液压缸的另一端通过第四活塞杆铰接在所述执行工作臂上。
21、进一步地,所述末端执行机构还包括:
22、第五液压缸,其一端铰接在所述执行工作臂上;
23、第三连接杆,其一端铰接在所述执行工作臂上,另一端与所述第五液压缸的第五活塞杆铰接;
24、第四连接杆,其一端铰接在所述执行工作臂上,另一端与所述第三连接杆铰接,且所述第四连接杆与所述转动油缸铰接。
25、进一步地,所述执行部件为冲击锤、挖斗、吊环中的任意一种。
26、本申请的第二方面,提供了一种工程机械车,所述工程机械车上安装有上述任一项所述的一种工作臂。
27、与现有技术相比,本申请具有以下的技术效果:
28、本申请的一种增大工作角度、提高承载能力的工作臂可以通过第一俯仰角调节机构和第二俯仰角调节机构配合作用,共同调节伸缩臂机构的俯仰角度,通过两个调节机构的共同调节作用可以增大伸缩臂的工作角度,扩大工作臂的工作范围;此外,本申请的基座、第一连接杆、第二连接杆和连接臂间构成一个四连杆机构,能较大程度分担末端执行机构工作时产生的冲击振动,提高了工作臂的承载能力和抗冲击能力。
29、本申请的一种工程机械车因具有本申请的工作臂结构,其同样具有工作角度大、承载能力高的优点,在此不再赘述。
技术特征:
1.一种增大工作角度、提高承载能力的工作臂,其特征在于,包括:
2.如权利要求1所述的工作臂,其特征在于,所述第一液压缸的一端铰接在所述连接臂的中间位置上。
3.如权利要求1所述的工作臂,其特征在于,所述第一连接杆为三角形板,所述第一连接杆的三个端点分别与所述第二活塞杆、所述基座和所述第二连接杆铰接。
4.如权利要求3所述的工作臂,其特征在于,所述基座上设有向上凸出的连接板,所述第一连接杆的左下端与所述连接板的上端铰接。
5.如权利要求1所述的工作臂,其特征在于,所述伸缩臂机构包括:
6.如权利要求5所述的工作臂,其特征在于,所述末端执行机构包括:
7.如权利要求6所述的工作臂,其特征在于,还包括第四液压缸,所述第四液压缸的一端铰接在所述第二伸缩臂上,所述第四液压缸的另一端通过第四活塞杆铰接在所述执行工作臂上。
8.如权利要求7所述的工作臂,其特征在于,所述末端执行机构还包括:
9.如权利要求6-8任一项所述的工作臂,其特征在于,所述执行部件为冲击锤、挖斗、吊环中的任意一种。
10.一种工程机械车,其特征在于,所述工程机械车上安装有权利要求1-9任一项所述的工作臂。
技术总结
本申请提供了一种增大工作角度、提高承载能力的工作臂和工程机械车,该工作臂包括基座、连接臂、伸缩臂机构、末端执行机构、第一俯仰角调节机构以及第二俯仰角调节机构。本申请的一种增大工作角度、提高承载能力的工作臂可以通过第一俯仰角调节机构和第二俯仰角调节机构配合作用,共同调节伸缩臂机构的俯仰角度,通过两个调节机构的共同调节作用可以增大伸缩臂的工作角度,扩大工作臂的工作范围;此外,本申请的基座、第一连接杆、第二连接杆和连接臂间构成一个四连杆机构,能较大程度分担末端执行机构工作时产生的冲击振动,提高了工作臂的承载能力和抗冲击能力。
技术研发人员:王泽栋,余子流,肖予涵,赵家明,谢馨仪,葛英娇,杨肖行,丁华锋
受保护的技术使用者:中国地质大学(武汉)
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!