动力控制系统及作业机械的制作方法
本发明涉及作业机械,尤其涉及一种动力控制系统及作业机械。
背景技术:
1、挖掘机是工程建设中必不可少的作业机械。挖掘机通常包括有动作系统和行走系统。动作系统用于控制作业机械的各执行机构动作,行走系统用于控制作业机械行走。现有技术中,作业系统和行走系统均为液压驱动系统,二者通过同一液压泵分流供给动力油液。在这种动力系统中,当动作系统与行走系统同时动作时,流量分配容易出现偏差,影响动作系统和行走系统的正常工作。
技术实现思路
1、本发明提供一种动力控制系统及作业机械,用以解决现有纯液压动力系统中,当动作系统与行走系统同时动作时,流量分配容易出现偏差,影响动作系统和行走系统的正常工作的问题。
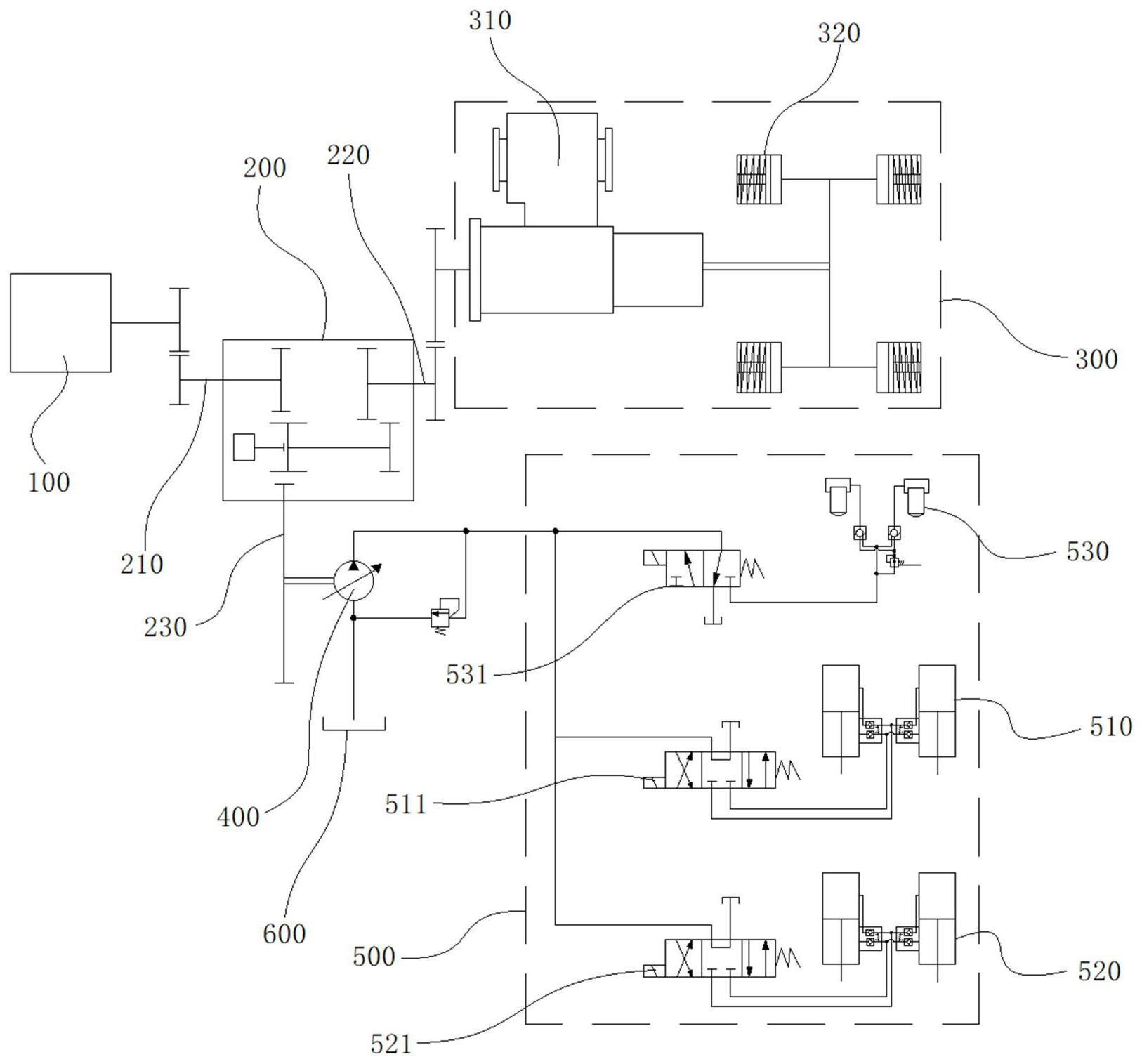
2、根据本发明的第一方面,提供了一种动力控制系统,包括电机、减速机、行走单元、液压泵及下车动作单元。
3、其中,所述减速机包括输入轴、第一输出轴及第二输出轴。所述电机与所述减速机的输入轴连接。所述减速机的输入轴与所述第一输出轴和/或所述第二输出轴连接。所述第一输出轴与所述行走单元连接。所述行走单元用于驱动作业机械行走。所述第二输出轴与所述液压泵连接。所述液压泵与所述下车动作单元连接,并用于驱动所述下车动作单元带动所述作业机械执行上车动作。
4、根据本发明提供的一种动力控制系统,所述动力控制系统还包括油箱。所述下车动作单元包括推土组件和支撑组件。
5、所述推土组件包括推土铲油缸及推土铲控制阀。所述推土铲油缸通过所述推土铲控制阀与所述液压泵及所述油箱连接。所述推土铲控制阀用于控制所述推土铲油缸与所述液压泵及所述油箱的连通状态。
6、所述支撑组件包括支腿油缸和支腿控制阀。所述支腿油缸通过所述支腿控制阀与所述液压泵及所述油箱连接。所述支腿控制阀用于控制所述支腿油缸与所述液压泵及所述油箱的连通状态。
7、根据本发明提供的一种动力控制系统,所述推土铲控制阀能够在推土位、推土收缩位和推土截止位之间转换。在所述推土位的状态下,所述液压泵驱动所述推土铲油缸伸出;在所述推土收缩位的状态下,所述液压泵驱动所述推土铲油缸收缩;在所述推土截止位的状态下,所述推土铲油缸保持当前伸缩状态。
8、所述支腿控制阀能够在支撑位、支撑收缩位和支撑截止位之间转换。在所述支撑位的状态下,所述液压泵驱动所述支腿油缸伸出;在所述支撑收缩位的状态下,所述液压泵驱动所述支腿油缸收缩;在所述支撑截止位的状态下,所述支腿油缸保持当前伸缩状态。
9、根据本发明提供的一种动力控制系统,所述下车动作单元还包括行走平衡组件。所述行走平衡组件包括平衡油缸及平衡油缸控制阀。
10、所述平衡油缸通过所述平衡油缸控制阀与所述液压泵连接。所述平衡油缸控制阀用于控制所述平衡油缸与所述液压泵及所述油箱的连通状态。
11、根据本发明提供的一种动力控制系统,所述平衡油缸控制阀能够在平衡位和平衡收缩位之间转换。在所述平衡位的状态下,所述液压泵驱动所述平衡油缸伸出;在所述平衡收缩位的状态下,所述液压泵驱动所述平衡油缸收缩。
12、根据本发明提供的一种动力控制系统,所述动力控制系统还包括操纵手柄。所述操纵手柄与所述推土铲控制阀、所述支腿控制阀及所述平衡油缸控制阀连接,并用于分别控制所述推土铲控制阀、所述支腿控制阀及所述平衡油缸控制阀的工作位。
13、根据本发明提供的一种动力控制系统,所述动力控制系统还包括控制单元和压力传感器。所述压力传感器与所述操纵手柄连接。并用于检测所述操纵手柄的操纵压力。所述控制单元与所述操纵手柄及所述压力传感器连接。所述控制单元用于基于所述操纵手柄的操作方向及所述压力传感器的检测结果分别控制所述推土铲控制阀、所述支腿控制阀及所述平衡油缸控制阀的工作位及工作油口开度。
14、根据本发明提供的一种动力控制系统,所述行走单元包括桥箱和车轮机构。所述第一输出轴与所述桥箱连接。所述桥箱与所述车轮机构连接。所述车轮机构上设置有转速检测件。
15、根据本发明提供的一种动力控制系统,所述转速检测件与所述控制单元连接。基于所述转速检测件的检测结果大于0,所述控制单元控制所述推土铲控制阀切换至所述推土截止位、所述支腿控制阀切换至所述支撑截止位、所述平衡油缸控制阀切换至所述平衡位。
16、根据本发明的第二方面,提供了一种作业机械,包括如上所述的动力控制系统。
17、在本发明提供的动力控制系统中,包括电机、减速机、行走单元、液压泵及下车动作单元。电机与减速机的输入轴连接,减速机的输入轴与其第一输出轴和/或第二输出轴连接。也就是说,减速机的输入轴能够与其第一输出轴和第二输出轴同时连接,或者,减速机的输入轴能够与其第一输出轴和第二输出轴同时断开,或者,减速机的输入轴能够与第一输出轴和第二输出轴中的任意一者单独连接。减速机的第一输出轴与行走单元连接,以驱动行走单元带动作业机械行走。减速机的第二输出轴与液压泵连接,并用于驱动液压泵工作,液压泵与下车动作单元连接,以驱动下车动作单元带动作业机械执行各类上车动作,例如,上车动作包括但是不限于推土、调整动臂、铲斗、支腿及平衡油缸等的工作状态。
18、在工作过程中,电机通过减速机能够分别驱动行走单元及用于为下车动作单元供油的液压泵工作。例如,当需要独立驱动行走单元工作时,减速机的输入轴与其第一输出轴连接,电机通过减速机驱动行走单元进行行走动作。当需要独立驱动下车动作单元工作时,减速机的输入轴与其第二输出轴连接,电机通过减速机驱动液压泵工作,以使液压泵为下车动作单元提供动力油液。当需要同时驱动行走单元及下车动作单元时,减速机的输入轴同时与第一输出轴和第二输出轴连接,电机通过减速机的第一输出轴独立驱动行走单元进行行走动作,电机通过减速机的第二输出轴独立驱动液压泵启动,以使液压泵向下车动作单元供油。
19、通过这种结构设置,电机通过减速机能够单独或者同时驱动行走单元及液压泵。液压泵与下车动作单元连接,以为下车动作单元独立供给液压油。当需要行走单元及下车动作单元同时动作时,电机通过减速机的第一输出轴独立驱动行走单元进行行走动作,通过减速机的第二输出轴独立驱动液压泵启动,以使液压泵向下车动作单元供油。由此,有效避免了流量分配出现偏差的问题。
20、进一步,由于该作业机械包括如上所述的动力控制系统,因此,其同样具备如上所述的各项优势。
技术特征:
1.一种动力控制系统,其特征在于,包括:电机、减速机、行走单元、液压泵及下车动作单元,
2.根据权利要求1所述的动力控制系统,其特征在于,所述动力控制系统还包括油箱,所述下车动作单元包括推土组件和支撑组件;
3.根据权利要求2所述的动力控制系统,其特征在于,所述推土铲控制阀能够在推土位、推土收缩位和推土截止位之间转换,在所述推土位的状态下,所述液压泵驱动所述推土铲油缸伸出;在所述推土收缩位的状态下,所述液压泵驱动所述推土铲油缸收缩;在所述推土截止位的状态下,所述推土铲油缸保持当前伸缩状态;
4.根据权利要求3所述的动力控制系统,其特征在于,所述下车动作单元还包括行走平衡组件,所述行走平衡组件包括平衡油缸及平衡油缸控制阀,
5.根据权利要求4所述的动力控制系统,其特征在于,所述平衡油缸控制阀能够在平衡位和平衡收缩位之间转换,在所述平衡位的状态下,所述液压泵驱动所述平衡油缸伸出;在所述平衡收缩位的状态下,所述液压泵驱动所述平衡油缸收缩。
6.根据权利要求5所述的动力控制系统,其特征在于,所述动力控制系统还包括操纵手柄,所述操纵手柄与所述推土铲控制阀、所述支腿控制阀及所述平衡油缸控制阀连接,并用于分别控制所述推土铲控制阀、所述支腿控制阀及所述平衡油缸控制阀的工作位。
7.根据权利要求6所述的动力控制系统,其特征在于,所述动力控制系统还包括控制单元和压力传感器,所述压力传感器与所述操纵手柄连接,并用于检测所述操纵手柄的操纵压力,所述控制单元与所述操纵手柄及所述压力传感器连接,所述控制单元用于基于所述操纵手柄的操作方向及所述压力传感器的检测结果分别控制所述推土铲控制阀、所述支腿控制阀及所述平衡油缸控制阀的工作位及工作油口开度。
8.根据权利要求7所述的动力控制系统,其特征在于,所述行走单元包括桥箱和车轮机构,所述第一输出轴与所述桥箱连接,所述桥箱与所述车轮机构连接,所述车轮机构上设置有转速检测件。
9.根据权利要求8所述的动力控制系统,其特征在于,所述转速检测件与所述控制单元连接,基于所述转速检测件的检测结果大于0,所述控制单元控制所述推土铲控制阀切换至所述推土截止位、所述支腿控制阀切换至所述支撑截止位、所述平衡油缸控制阀切换至所述平衡位。
10.一种作业机械,其特征在于,包括根据权利要求1至9中任一项所述的动力控制系统。
技术总结
本发明涉及作业机械技术领域,公开了一种动力控制系统及作业机械。在动力控制系统中,减速机包括输入轴、第一输出轴及第二输出轴。电机与减速机的输入轴连接,减速机的输入轴与第一输出轴和/或第二输出轴连接。第一输出轴与行走单元连接第二输出轴与液压泵连接,液压泵与下车动作单元连接,并用于驱动下车动作单元带动作业机械执行上车动作。通过这种结构设置,电机通过减速机单独或同时驱动行走单元及液压泵。液压泵为下车动作单元独立供给液压油。在行走单元及下车动作单元同时动作时,电机通过第一输出轴独立驱动行走单元行走,通过第二输出轴独立驱动液压泵启动,以使液压泵向下车动作单元供油。由此,有效避免了流量分配出现偏差的问题。
技术研发人员:马云跃,石杰,王丽娟
受保护的技术使用者:三一重机有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!