管道清淤机器人的制作方法
本发明涉及清洁设备,尤其涉及一种管道清淤机器人。
背景技术:
1、随着城市的发展,路面的杂物越来越多,当雨量过大时,杂物会随着雨水进入下水管道,造成堵塞。
2、现有管道堵塞时,一般借助钢丝或其他工具人工进行清淤。这种方式存在如下缺陷:其一,管道清淤不彻底,还存在部分拥堵;其二,人工需耗费较大体力,且清淤效率较低;其三,下水管道内存在沼气,对清理人员的人身安全构成一定威胁。
技术实现思路
1、为克服现有管道清淤不彻底、费时费力且存在安全隐患的技术缺陷,本发明提供了一种管道清淤机器人。
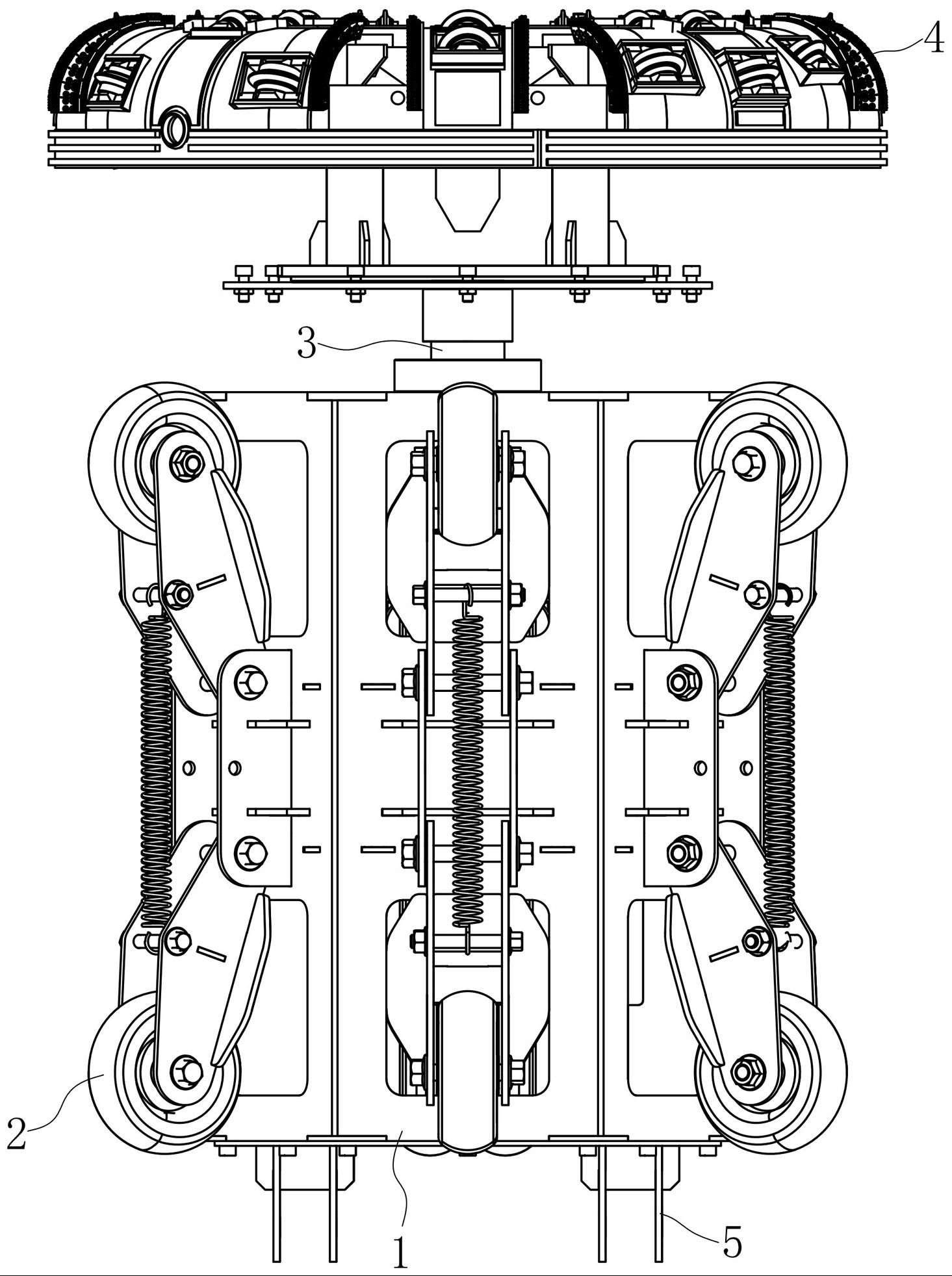
2、本发明提供的管道清淤机器人,包括:
3、机壳,其包括筒状侧壁和分别位于所述筒状侧壁两端的前端板和后端板;
4、行走机构,其包括多套行走轮组,多套行走轮组皆安装于所述筒状侧壁的外侧且沿所述筒状侧壁的周向均匀分布,其中一套行走轮组连接有行走驱动件以作为驱动轮组,剩余的行走轮组作为支撑轮组;
5、旋割驱动件,其固定在所述筒状侧壁内,所述旋割驱动件的输出轴贯穿所述前端板;
6、旋割机构,其位于所述前端板的前方,所述旋割机构包括刀盘和刀具,所述刀盘的中心与所述旋割驱动件的输出轴固定连接,所述刀盘开设有适于让打散的堵塞物通过的第一避让窗口,所述刀具安装在所述刀盘上。
7、可选的,支撑轮组包括:
8、安装架,其固定于所述筒状侧壁的外侧中部;
9、轮架,其设有两个且对称分布于所述安装架的前后两侧,所述轮架的第一端通过铰接轴铰接于所述安装架上,且所述铰接轴垂直于所述筒状侧壁的轴线;
10、轮体,其设有两个且分别通过轮轴安装在两个轮架的第二端上,所述轮轴与所述铰接轴平行;
11、拉伸弹簧,其与所述筒状侧壁的轴线平行,所述拉伸弹簧的两端分别连接于两个轮架的中部。
12、可选的,所述前端板和后端板上皆开设有适于打散的堵塞物通过的第二避让窗口。
13、可选的,所述刀盘包括:
14、箍圈;
15、安装条,其设有2n根且n为大于2的正整数,所述安装条的第一端位于所述箍圈的中心且所有安装条的第一端相互固定连接,所述安装条的另一端延伸并固定在所述箍圈上,所有安装条沿所述箍圈的周向均布,相邻两根安装条之间形成所述第一避让窗口,所述刀具安装在所述安装条上;
16、连接座,其固定连接于所有安装条的后侧,所述连接座适于固定连接所述旋割驱动件的输出轴。
17、可选的,相邻安装条的两个相对侧壁上皆固定有凸板,且两个相对侧壁上的凸板交错布置。
18、可选的,所述旋割驱动件的输出轴端部固定有第一法兰盘,所述连接座包括:
19、连接柱,其设有至少两根,所述连接柱与所述箍圈的轴向平行,所述连接柱的第一端与所述安装条的中部固定连接;
20、第二法兰盘,其与所有连接柱的第二端固定连接,所述第二法兰盘与所述箍圈同轴,所述第二法兰盘与所述第一法兰盘贴合且固定连接。
21、可选的,所述刀盘还包括:
22、安装块,其设有n个且分别固定于间隔分布的n根安装条的第二端,所述安装块上设有所述刀具。
23、可选的,所述刀具包括:
24、刀轮,其安装在所述安装条的前表面上;
25、刀片,其安装在所述安装条宽度方向上的两侧。
26、可选的,所述旋割驱动件为旋转电机,所述旋转电机的壳体固定在所述筒状侧壁的内部,所述旋转电机的输出轴贯穿所述前端板。
27、可选的,所述后端板的后侧固定有连接架,所述连接架适于连接保险绳。
28、本发明提供的技术方案与现有技术相比具有如下优点:
29、1、本发明提供的管道清淤机器人,通过行走机构能够内撑于管道内并独立沿管道行走,位于前端的旋割机构在旋割驱动件的驱动下能够将管道内的堵塞物打散,旋割机构配合行走机构能够将整个管道内的堵塞物皆打散,从而在后续冲洗时能将堵塞物冲走,完成清淤。采用本装置对管道进行清淤,相对于现有人工清淤而言,具有如下优点:其一,由于旋割机构与管道适配,所以通过行走能够将管道内所有堵塞物打散完成清除,清淤较为彻底;其二,采用机械代替人工,节省了大量劳动力,且清淤效率较高;其三,不需人员进入管道,避免管道内的沼气威胁清理人员的人身安全。
30、2、本发明提供的管道清淤机器人,在筒状侧壁的外侧设有多套行走轮组,并且其中一套为驱动轮组、其他为支撑轮组,单动力结构能够避免多动力结构不同步导致的卡顿,使得机器人前进更加平稳。
31、3、本发明提供的管道清淤机器人,在旋割机构的刀盘上设有第一避让窗口,在刀具将堵塞物打散后能够通过避让窗口进入刀盘后方,然后从行走轮组间隙排出,避免打散的堵塞物堆积阻碍机器人的前行,从而使得机器人前进更加顺畅。
技术特征:
1.一种管道清淤机器人,其特征在于,包括:
2.根据权利要求1所述的管道清淤机器人,其特征在于,支撑轮组(22)包括:
3.根据权利要求1所述的管道清淤机器人,其特征在于,所述前端板(12)和后端板(13)上皆开设有适于打散的堵塞物通过的第二避让窗口(14)。
4.根据权利要求1所述的管道清淤机器人,其特征在于,所述刀盘(41)包括:
5.根据权利要求4所述的管道清淤机器人,其特征在于,相邻安装条(413)的两个相对侧壁上皆固定有凸板(415),且两个相对侧壁上的凸板(415)交错布置。
6.根据权利要求4所述的管道清淤机器人,其特征在于,所述旋割驱动件(3)的输出轴端部固定有第一法兰盘(31),所述连接座(414)包括:
7.根据权利要求4所述的管道清淤机器人,其特征在于,所述刀盘(41)还包括:
8.根据权利要求4或7所述的管道清淤机器人,其特征在于,所述刀具(42)包括:
9.根据权利要求1所述的管道清淤机器人,其特征在于,所述旋割驱动件(3)为旋转电机,所述旋转电机的壳体固定在所述筒状侧壁(11)的内部,所述旋转电机的输出轴贯穿所述前端板(12)。
10.根据权利要求1所述的管道清淤机器人,其特征在于,所述后端板(13)的后侧固定有连接架(5),所述连接架(5)适于连接保险绳。
技术总结
本发明涉及清洁设备技术领域,具体涉及一种管道清淤机器人,包括:机壳,其包括筒状侧壁和分别位于筒状侧壁两端的前端板和后端板;行走机构,其包括多套行走轮组,多套行走轮组皆安装于筒状侧壁的外侧且沿筒状侧壁的周向均匀分布,其中一套行走轮组连接有行走驱动件以作为驱动轮组,剩余的行走轮组作为支撑轮组;旋割驱动件,其固定在筒状侧壁内,旋割驱动件的输出轴贯穿前端板;旋割机构,其位于前端板的前方,旋割机构包括刀盘和刀具,刀盘的中心与旋割驱动件的输出轴固定连接,刀盘开设有适于让打散的堵塞物通过的第一避让窗口,刀具安装在刀盘上。本管道清淤机器人清淤彻底、省时省力且能够消除人工作业带来的安全风险。
技术研发人员:郝慧南,陈文龙,张志香,李晓燕,郭晓盼
受保护的技术使用者:山西八建集团有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!