一种巷道修复用挖掘机远程遥控装置及遥控方法与流程
本发明涉及一种远程遥控挖掘机修复,具体是一种巷道修复用挖掘机远程遥控装置。
背景技术:
1、工程机械智能化水平的提高,挖掘机开始向半自动或者全自动控制方向发展,半自动或者全自动指的是挖掘机铲斗齿尖的轨迹自动控制,一些地应力大且围岩呈显著软岩的巷道,因其围岩条件差,变形波动大,稳定性差往往在出现破损的情况,需要对巷道进行修复,通过对巷道采取措施,进行恢复和巩固,以确保巷道的安全,修复时清理破损部分,对破损部分进行清理,清除破碎的矿石、煤渣等物质,挖掉破损处周边的土石物质,加固支撑部位,对支撑部位进行加固,采用木材、钢材等材料进行加固,以控制破损部分的扩展,倾斜中厚煤层错层位外错式巷道布置及相邻巷道,根据倾斜中厚煤层错层位外错式巷道布置形式所具有的立体化空间形式,导致巷道受力较多的一侧往往朝着倾斜向下的方向发展,破损部分的渣石易积累在该受力侧的位置处,落入到巷道地面与该侧壁的夹角位置,在处于一定倾斜长度的巷道通过挖掘机清理时,受到倾斜因素的影响在一个位置处需要多次变换位置清理,控制挖掘机的操作程度较难,故需要一种巷道修复用挖掘机远程遥控装置。
技术实现思路
1、本发明的目的在于提供一种巷道修复用挖掘机远程遥控装置,通过利于在较长的巷道内进展修复工作,反应巷道破损所带来的信号变化,不仅能够实现少控制整体方向的目的,方便操作,且能够对后续的巷道修复奠定信号基础,利于工作进展,可以有效解决背景技术中的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、一种巷道修复用挖掘机远程遥控装置,包括巷道腔和用于进行修复的第一机体,所述巷道腔内部具有受损堆积区域,所述第一机体通过控制总成进行控制,所述第一机体内部具有用于通过所述控制总成进行控制的第二机体,所述第一机体为所述第二机体的信号源,所述第二机体前侧具有挖斗和斗齿,所述挖斗上设有挖斗控制组件,所述挖斗侧壁具有侧壁切线,所述侧壁切线与所述受损堆积区域之间形成有夹角区域,所述斗齿通过所述挖斗控制组件控制位置位于所述夹角区域内铲料,减少所述第二机体整体的运动方向进而提高遥控的灵活性。
4、作为本发明再进一步的方案:所述第一机体上具有机壳,所述机壳后侧铰接有受控仓门,且所述机壳内部具有用于置放所述第二机体的腔体;通过控制受控仓门打开,由第二控制模块控制第二机体运动到巷道腔内,受控仓门为电动元件进行驱动打开和关闭,便于第二机体位于机壳内部进出,且腔体内部设置有用于限制第二机体的限位器,使第二机体可以稳定位于第一机体内。
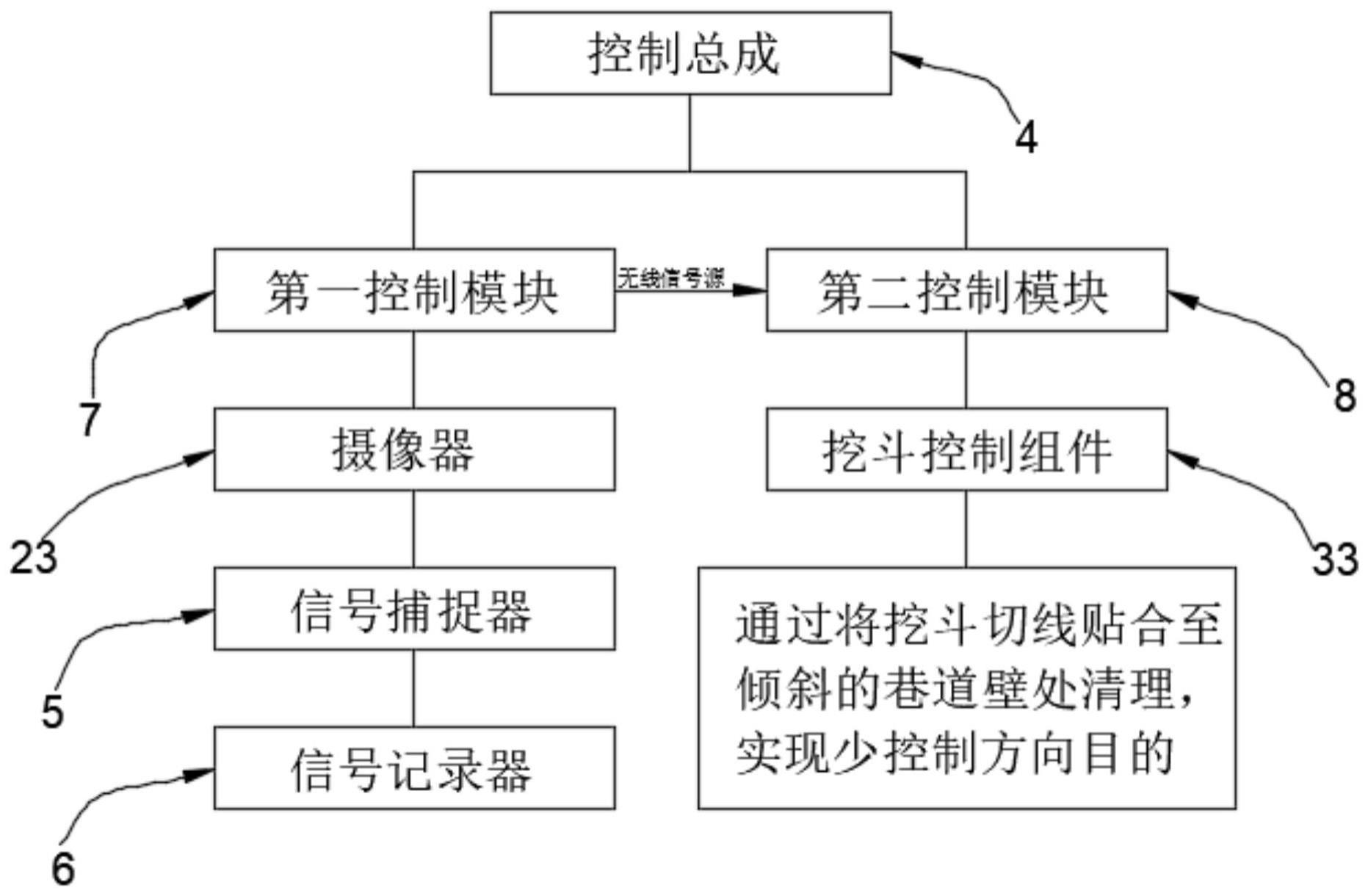
5、作为本发明再进一步的方案:所述第一机体外侧固定安装有摄像器,所述控制总成包括有用于显示所述摄像器拍摄画面的显示器和用于控制所述第一机体的第一控制模块;摄像器设置在第一机体的上方,可以拍摄第一机体周围的画面,使画面传输到显示器上供操控者进行观察。
6、作为本发明再进一步的方案:所述第一机体上设有无线信号发射器和信号捕捉器,所述控制总成包括有用于控制所述第二机体运动的第二控制模块和用于显示所述信号捕捉器检测信号强度的信号记录器;随着第一机体的行走,通过信号捕捉器在巷道腔内不同的位置记录信号强度,使信号数据传输到信号记录器内,进行反应巷道破损所带来的信号变化,能够对后续的巷道修复奠定信号基础,信号捕捉器的作用进行检测第一机体位于的区域位置处的信号,使信号记录器进行显示位置坐标和该处位置的信号强度,通过记录,可以进行对比,是否因为巷道内受到的弯曲和挤压的一些因素导致信号干扰和衰减的现象,对某一区域位置能够进行反馈现象。
7、作为本发明再进一步的方案:所述挖斗控制组件包括贴合承料板、电机和驱动杆,所述贴合承料板贴合至所述挖斗外侧,所述贴合承料板与所述斗齿固定连接,且所述贴合承料板外侧固定连接有连接伸缩板;驱动贴合承料板沿着挖斗的外壁伸出,使贴合承料板增加承料的面积,随着挖斗的运动,或者第一机体的前进和后退运动,能够收集一次物料,将物料运到物料输送车内即可。
8、作为本发明再进一步的方案:所述电机与所述连接伸缩板固定连接,所述驱动杆输出端固定连接有安装座,所述电机固定安装在所述安装座上,且所述驱动杆与所述挖斗固定连接;当启动电机时,可以带动贴合承料板旋转和斗齿旋转,控制到与受损堆积区域内相近平行的位置处,便于充分处理该位置的物料。
9、作为本发明再进一步的方案:所述第二控制模块内设有用于控制所述电机和所述驱动杆的控制器;通过启动相应的按钮,即可操作电机和驱动件的运行和停止。
10、作为本发明再进一步的方案:所述挖斗和所述斗齿之间具有倾斜角,通过将所述贴合承料板承载的物料倾倒至所述挖斗内;随着挖斗的运动,或者第一机体的前进和后退运动,能够收集一次区域位置的物料,将物料运到物料输送车内即可,倾斜角能够便于物料从贴合承料板进入到挖斗内。
11、作为本发明再进一步的方案,一种巷道修复用挖掘机远程遥控装置,包括如下情况的使用方法:
12、a:由所述第一控制模块控制所述第一机体进入到所述巷道腔内进行整体修复工作,在所述巷道腔内存在有受损堆积区域,通过控制所述受控仓门打开,由所述第二控制模块控制所述第二机体运动到所述巷道腔内;
13、b:所述第二机体靠近所述受损堆积区域,根据所述受损堆积区域的倾斜度进行控制所述斗齿的位置,使所述斗齿与所述受损堆积区域平行,使所述斗齿伸出即可控制所述夹角区域内部的物料,此时只需要控制所述第二机体的前进和后退方向;
14、c:随着所述第一机体的行走,通过所述信号捕捉器在所述巷道腔内不同的位置记录信号强度,使信号数据传输到所述信号记录器内,进行反应巷道破损所带来的信号变化。
15、与现有技术相比,本发明的有益效果是:
16、由第一控制模块控制第一机体进入到巷道腔内进行整体修复工作,在巷道腔内存在有受损堆积区域,巷道内受到的弯曲和挤压的一些因素导致信号干扰和衰减、或不利于第一机体行走的区域,可以以第一机体为信号源,通过控制受控仓门打开,由第二控制模块控制第二机体运动到巷道腔内,利于在较长的巷道内进展修复工作;
17、第二机体靠近受损堆积区域,根据受损堆积区域的倾斜度进行控制斗齿的位置,使斗齿与受损堆积区域平行,斗齿伸出即可控制夹角区域内部的物料,此时只需要控制第二机体的前进和后退方向,将位于受损堆积区域内的物料清理,利于对巷道地面与侧壁夹角位置处进行清理,随着第一机体的行走,通过信号捕捉器在巷道腔内不同的位置记录信号强度,使信号数据传输到信号记录器内,进行反应巷道破损所带来的信号变化,不仅能够实现少控制整体方向的目的,方便操作,且能够对后续的巷道修复奠定信号基础,利于工作进展。
技术特征:
1.一种巷道修复用挖掘机远程遥控装置,包括巷道腔(1)和用于进行修复的第一机体(2),所述巷道腔(1)内部具有受损堆积区域(11),其特征在于,所述第一机体(2)通过控制总成(4)进行控制,所述第一机体(2)内部具有用于通过所述控制总成(4)进行控制的第二机体(3),所述第一机体(2)为所述第二机体(3)的信号源,所述第二机体(3)前侧具有挖斗(31)和斗齿(32),所述挖斗(31)上设有挖斗控制组件(33),所述挖斗(31)侧壁具有侧壁切线(34),所述侧壁切线(34)与所述受损堆积区域(11)之间形成有夹角区域(9),所述斗齿(32)通过所述挖斗控制组件(33)控制位置位于所述夹角区域(9)内铲料,减少所述第二机体(3)整体的运动方向进而提高遥控的灵活性。
2.根据权利要求1所述的一种巷道修复用挖掘机远程遥控装置,其特征在于,所述第一机体(2)上具有机壳(21),所述机壳(21)后侧铰接有受控仓门(22),且所述机壳(21)内部具有用于置放所述第二机体(3)的腔体。
3.根据权利要求1所述的一种巷道修复用挖掘机远程遥控装置,其特征在于,所述第一机体(2)外侧固定安装有摄像器(23),所述控制总成(4)包括有用于显示所述摄像器(23)拍摄画面的显示器(41)和用于控制所述第一机体(2)的第一控制模块(7)。
4.根据权利要求1所述的一种巷道修复用挖掘机远程遥控装置,其特征在于,所述第一机体(2)上设有无线信号发射器和信号捕捉器(5),所述控制总成(4)包括有用于控制所述第二机体(3)运动的第二控制模块(8)和用于显示所述信号捕捉器(5)检测信号强度的信号记录器(6)。
5.根据权利要求4所述的一种巷道修复用挖掘机远程遥控装置,其特征在于,所述挖斗控制组件(33)包括贴合承料板(331)、电机(334)和驱动杆(335),所述贴合承料板(331)贴合至所述挖斗(31)外侧,所述贴合承料板(331)与所述斗齿(32)固定连接,且所述贴合承料板(331)外侧固定连接有连接伸缩板(332)。
6.根据权利要求5所述的一种巷道修复用挖掘机远程遥控装置,其特征在于,所述电机(334)与所述连接伸缩板(332)固定连接,所述驱动杆(335)输出端固定连接有安装座(333),所述电机(334)固定安装在所述安装座(333)上,且所述驱动杆(335)与所述挖斗(31)固定连接。
7.根据权利要求6所述的一种巷道修复用挖掘机远程遥控装置,其特征在于,所述第二控制模块(8)内设有用于控制所述电机(334)和所述驱动杆(335)的控制器。
8.根据权利要求5所述的一种巷道修复用挖掘机远程遥控装置,其特征在于,所述挖斗(31)和所述斗齿(32)之间具有倾斜角,通过将所述贴合承料板(331)承载的物料倾倒至所述挖斗(31)内。
9.根据权利要求1-8任一所述的一种巷道修复用挖掘机远程遥控装置,其特征在于:包括如下情况的遥控使用方法:
技术总结
本发明公开了一种巷道修复用挖掘机远程遥控装置,包括巷道腔和用于进行修复的第一机体,所述巷道腔内部具有受损堆积区域,所述第一机体通过控制总成进行控制,所述第一机体内部具有用于通过所述控制总成进行控制的第二机体,所述第一机体为所述第二机体的信号源,所述第二机体前侧具有挖斗和斗齿,所述挖斗上设有挖斗控制组件;巷道内受到的弯曲和挤压的一些因素导致信号干扰和衰减、或不利于第一机体行走的区域,利于在较长的巷道内进展修复工作,使斗齿与受损堆积区域平行,将位于受损堆积区域内的物料清理,反应巷道破损所带来的信号变化,不仅能够实现少控制整体方向的目的,方便操作,且能够对后续的巷道修复奠定信号基础,利于工作进展。
技术研发人员:张磊,李鑫,张明明,葛怀忠
受保护的技术使用者:河南豫亳智能装备科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!