一种机械化施工快速临锚装备的制作方法
本发明涉及电力施工,特别涉及一种机械化施工快速临锚装备。
背景技术:
1、在输电线路施工领域,临锚作业是一个关键环节,涉及到组塔、拉线、牵张放线设备安装以及跨越施工等多个方面。然而,现存的临锚施工方法存在诸多问题和不足,包括劳动强度大、施工效率低和对环境的破坏。常见的做法是通过人工钻进或使用大型机械设备进行开挖埋设地锚,这些方法既不能满足全过程机械化施工的需求,也不符合应急抢修临锚的效率和安全性要求。
2、具体来说,采用多人手动操作加力杆进行钻进的方法,虽然在某些场合是可行的,但这样的操作劳动强度大,效率低下。与此同时,如果使用大型机械进行开挖埋设,会导致开挖面积大和环境破坏严重。特别是在紧急情况下,如应急抢修,这些传统方法往往不能快速有效地完成任务。
3、因此,存在一种迫切的需求,开发一种新的机械化施工快速临锚装备。
技术实现思路
1、本申请提供一种机械化施工快速临锚装备,以提高地锚施工的效率。
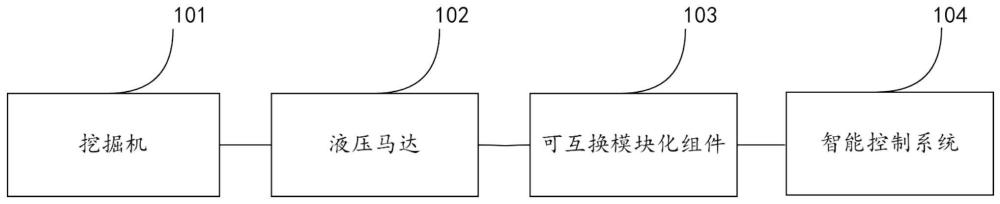
2、本申请提供的机械化快速临锚装备,包括:
3、挖掘机,该挖掘机作为装备的主体结构,配备有液压转向系统和悬挂结构,所述液压转向系统和悬挂结构用于控制装备的方向和稳定性;
4、液压马达,该液压马达与挖掘机对接,并具有正反两个方向的旋转能力,用于提供动力以执行地锚钻进和取出作业,以及土方开挖作业;
5、可互换模块化组件,包括用于地锚钻进和取出作业的模块化地锚组件和用于土方开挖作业的模块化挖掘组件;所述模块化地锚组件和模块化挖掘组件可通过接口与液压马达进行快速连接和断开,以适应不同的作业需求;所述模块化地锚组件由多个可拆卸组件构成,以适应不同的土壤条件;
6、智能控制系统,该智能控制系统与挖掘机和液压马达连接,用于根据土壤条件调节液压马达的转矩和转速。
7、更进一步地,所述模块化地锚组件由高强度、耐腐蚀和抗磨损的合金钢制造。
8、更进一步地,所述模块化地锚组件包括一个主体轴和多个可交换的钻头、扩展片和连接件。
9、更进一步地,所述钻头、扩展片是根据不同的土壤类型、土壤密度和土壤湿度进行定制的。
10、更进一步地,所述智能控制系统采用一个数学模型以实现根据土壤条件调节液压马达的转矩和转速,所述数学模型可以使用如下的优化函数f(t,s,d,m)表示:
11、
12、其中,t是液压马达的转矩;s是液压马达的转速;d是土壤密度,m是土壤湿度;kt、kd、ks和km是与转矩t、转速s、土壤密度d和湿度m相关的各种物理参数的标准化因子;α和β是权重系数;
13、通过求解所述优化函数的局部最优解,确定在特定土壤条件下最优的转矩t和转速s。
14、更进一步地,所述智能控制系统使用梯度下降法来求解优化函数f(t,s,d,m)的局部最优解,该梯度下降法包括以下步骤:
15、初始化转矩t和转速s的初始值,以及设置收敛阈值ε;
16、在每次迭代中,计算优化函数f关于转矩t和转速s的梯度,该梯度表示为:
17、
18、利用计算出的梯度和预设的学习率α,更新转矩t和转速s,获得更新后的转矩tnew和转速snew:
19、
20、
21、其中,转矩told和转速sold分别是更新前的转矩和转速;
22、计算更新后的函数值f(tnew,snew,d,m),并检查其与上一次迭代的函数值之间的差值是否小于收敛阈值ε;
23、如果没有达到收敛条件,则返回计算梯度的步骤,继续进行迭代。
24、更进一步地,所述机械化快速临锚装备,还包括环境监测系统,该环境监测系统实时监测施工过程中的噪音、震动和尘埃,以确保施工过程符合环境保护要求。
25、更进一步地,所述环境监测系统包括噪音监测子系统,尘埃监测子系统以及震动监测子系统;
26、其中,所述噪音监测子系统使用高灵敏度、多频段的麦克风进行噪音实时监测;所述尘埃监测子系统使用颗粒物传感器进行尘埃实时监测;所述震动监测子系统使用多轴加速度计和震动传感器进行震动实时监测。
27、更进一步地,所述环境监测系统,具备多级报警机制,用于防止环境因素的水平超过设定的标准。
28、更进一步地,所述多级报警机制,包括声音、光线或移动应用程序进行报警。
29、本申请提出的机械化快速临锚装备不仅包括基础的挖掘机,还引入了液压马达和可互换模块化组件,以及智能控制系统。此外,可互换模块化组件允许快速更换地锚和挖掘模块,增加了设备的多功能性和适应不同作业环境的能力。。最后,通过与挖掘机和液压马达连接,该系统能够根据土壤条件自动调节液压马达的转矩和转速。上述特征使得本申请具备显著的创造性。
30、本申请有益的效果主要体现在以下几点:
31、(1)由于装备结构的综合性和智能化,能够大大减少地锚钻进和取出所需的时间,从而提高整体施工效率。(2)通过机械化和自动化的操作,减少了人工劳动的需求,降低了劳动强度。(3)可互换模块化组件和智能控制系统的使用会减少对土地和环境的破坏,相对于传统的大型机械开挖,这一点尤为重要。(4)智能控制系统可以根据实时监测的土壤条件自动调整操作参数,从而减少因操作不当造成的安全隐患。
技术特征:
1.一种机械化快速临锚装备,其特征在于,包括:
2.根据权利要求1所述的机械化快速临锚装备,其特征在于,所述模块化地锚组件由高强度、耐腐蚀和抗磨损的合金钢制造。
3.根据权利要求1所述的机械化快速临锚装备,其特征在于,所述模块化地锚组件包括一个主体轴和多个可交换的钻头、扩展片和连接件。
4.根据权利要求1所述的机械化快速临锚装备,其特征在于,所述钻头、扩展片是根据不同的土壤类型、土壤密度和土壤湿度进行定制的。
5.根据权利要求1所述的机械化快速临锚装备,其特征在于,所述智能控制系统采用一个数学模型以实现根据土壤条件调节液压马达的转矩和转速,所述数学模型可以使用如下的优化函数f(t,s,d,m)表示:
6.根据权利要求5所述的机械化快速临锚装备,其特征在于,所述智能控制系统使用梯度下降法来求解优化函数f(t,s,d,m)的局部最优解,该梯度下降法包括以下步骤:
7.根据权利要求1所述的机械化快速临锚装备,其特征在于,还包括环境监测系统,该环境监测系统实时监测施工过程中的噪音、震动和尘埃。
8.根据权利要求7所述的机械化快速临锚装备,其特征在于,所述环境监测系统包括噪音监测子系统,尘埃监测子系统以及震动监测子系统;
9.根据权利要求7所述的机械化快速临锚装备,其特征在于,所述环境监测系统,具备多级报警机制,用于防止环境因素的水平超过设定的标准。
10.根据权利要求9所述的机械化快速临锚装备,其特征在于,所述多级报警机制,包括声音、光线或移动应用程序进行报警。
技术总结
本发明涉及一种机械化快速临锚装备,该装备主要包括挖掘机、液压马达、可互换模块化组件以及智能控制系统。挖掘机作为装备的主体结构,具备液压转向系统和悬挂结构,用于有效控制装备的移动方向和稳定性。液压马达与挖掘机相连接,拥有正反两个方向的旋转能力,能够执行地锚钻进和取出作业,以及土方开挖作业。可互换模块化组件则增加了装备的多功能性,包括用于地锚钻进和取出的模块化地锚组件以及用于土方开挖的模块化挖掘组件。这些模块可通过接口与液压马达快速连接和断开,适应不同的作业需求。智能控制系统与挖掘机和液压马达连接,根据土壤条件智能地调节液压马达的转矩和转速。本发明提供了一种高效、多功能和安全的临锚装备解决方案。
技术研发人员:鲍海泉,谢伟伟,李伯康,李胜利,宋永东,张赟,刘小迪,方瑞寅,齐剑,梁琦,黄慧,王远
受保护的技术使用者:南阳中科恒力实业有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!