一种挖掘设备的挖掘作业面状态提示系统、方法及装置与流程
本公开实施例涉及自动驾驶领域,具体涉及一种挖掘设备的挖掘作业面状态提示系统、方法及装置。
背景技术:
1、在矿山无人驾驶领域,需要挖掘设备和无人驾驶矿车进行协同作业。通常,在进行挖掘作业时,要求采掘后的装载区平盘高程一致且符合设计要求。
2、目前,在矿山作业区域,会配置专职的设计员使用rtk测量仪器在每天白夜班交接班的空档期对装载区平盘高程进行打点测量,发现高程不一致或与设计要求不符时,则安排挖掘设备进行整改。但是这样的修整方案具有滞后性,事后整改费时费力,并且影响生产效率。
技术实现思路
1、本公开实施例提供了一种挖掘设备的挖掘作业面状态提示系统、方法及装置,通过获取无人驾驶车辆所停靠的装载区的高程信息,并将该高程信息发送给挖掘设备的协同作业系统,从而向所述挖掘设备的操作人员提示作业面的状态,当所述挖掘设备的挖掘作业面不符合要求时,及时修整,提高生产效率。
2、第一方面,本公开实施例提供了一种挖掘设备的挖掘作业面状态提示系统,包括:
3、无人驾驶车辆,该无人驾驶车辆包括定位模块以及第一通信模块,所述定位模块用于获取所述无人驾驶车辆的停靠位置的高程信息,所述第一通信模块用于将所述无人驾驶车辆的停靠位置的高程信息发送给所述挖掘设备;其中,所述无人驾驶车辆的停靠位置位于所述挖掘设备的挖掘作业面内,且所述停靠位置包括至少一个装载位,所述装载位随着所述挖掘设备的挖掘作业面的变化而更新;
4、挖掘设备协同作业系统,所述挖掘设备协同作业系统包括人机交互模块和第二通信模块,其中,所述第二通信模块用于接收所述无人驾驶车辆的所述第一通信模块发送的所述无人驾驶车辆的停靠位置的高程信息;所述人机交互模块用于对所述第二通信模块接收的所述高程信息进行显示,从而向所述挖掘设备的操作人员提示所述挖掘设备的挖掘作业面的状态。
5、可选的,所述第一通信模块或第二通信模块包括v2v和/或v2n模块中的至少一个。
6、可选的,所述定位模块包括gps定位模块、imu定位模块或者差分定位(rtk)模块中的至少一个。
7、进一步的,所述无人驾驶车辆包括高精地图模块,所述高精地图模块能够提供所述装载位的相关信息。
8、进一步的,所述系统还包括云平台,所述云平台包括高精地图模块和第二通信模块,所述高精地图模块能够向所述无人驾驶车辆提供所述装载位的相关信息,所述第二通信模块用于接收所述第一通信模块发送的所述无人驾驶车辆的停靠位置的高程信息。
9、进一步的,所述无人驾驶系统还包括感知系统,所述感知系统用于采集所述挖掘设备的挖掘作业面的点云数据,从而获取所述作业面的变化信息。
10、可选的,所述定位模块仅在所述无人驾驶车辆停靠在所述停靠位置时获取所述高程信息。
11、进一步的,所述定位模块基于所述定位模块检测的自身高程以及自身离地高度获取所述无人驾驶车辆的停靠位置的高程信息。
12、可选的,所述定位模块设置于所述无人驾驶车辆的车头位置和/或车尾位置。
13、第二方面,本公开实施例提供了一种挖掘设备的挖掘作业面状态提示方法,包括:
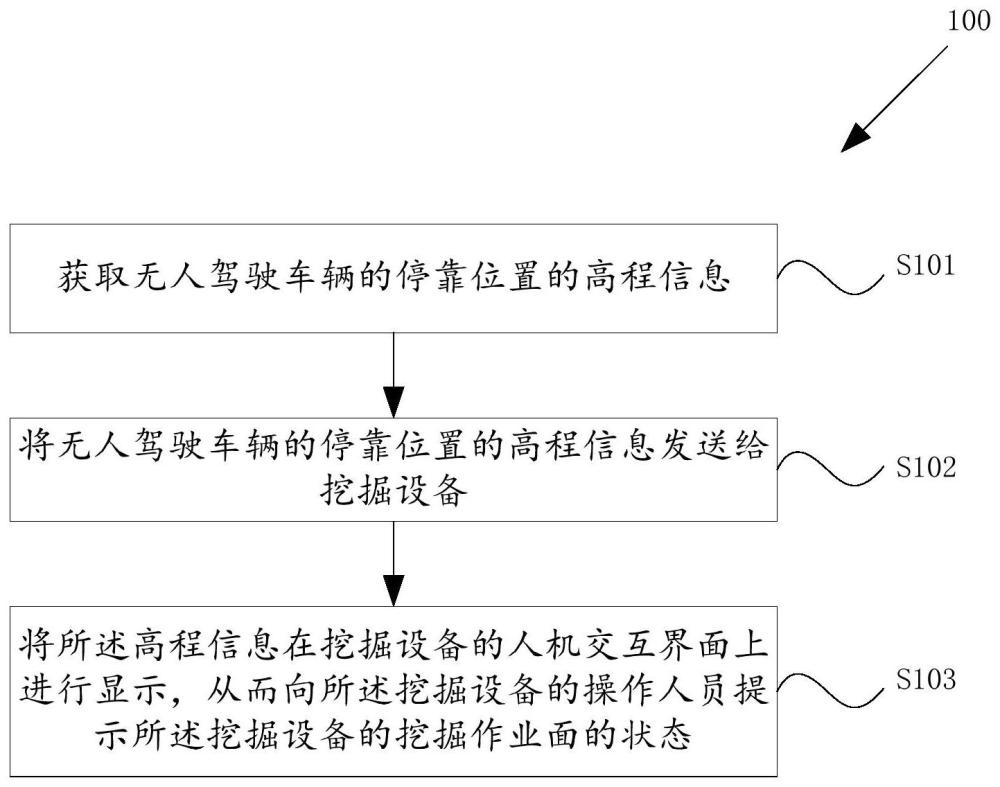
14、获取无人驾驶车辆的停靠位置的高程信息;其中,所述无人驾驶车辆的停靠位置位于所述挖掘设备的挖掘作业面内,且所述停靠位置包括至少一个装载位,所述装载位随着所述挖掘设备的挖掘作业面的变化而更新;
15、将所述无人驾驶车辆的停靠位置的高程信息发送给所述挖掘设备,并将所述高程信息在所述挖掘设备的人机交互界面上进行显示,从而向所述挖掘设备的操作人员提示所述挖掘设备的挖掘作业面的状态。
16、进一步的,所述方法还包括:将所述无人驾驶车辆的停靠位置的高程信息发送至云平台的高精地图模块。
17、可选的,所述装载位的相关信息由所述无人驾驶车辆的高精地图模块提供。
18、可选的,所述装载位的相关信息由所述云平台的高精地图模块提供。
19、进一步的,所述方法还包括:当所述挖掘设备对所述挖掘作业面进行修整后,重新计算所述无人驾驶车辆的停靠位置的高程信息,并发送至所述云平台进行更新。
20、第三方面,本公开实施例提供了一种挖掘设备的挖掘作业面状态提示装置,包括:
21、定位模块,用于确定挖掘设备的挖掘作业面状态提示装置的高程信息;
22、计算模块,用于根据所述定位模块确定的所述挖掘设备的挖掘作业面状态提示装置的高程信息,计算所述挖掘设备的挖掘作业面的高程信息;
23、通信模块,将所述挖掘设备的挖掘作业面的高程信息,发送给挖掘设备的协同作业系统,并在所述协同作业系统的人机交互模块中进行显示,从而向所述挖掘设备的操作人员提示所述挖掘设备的挖掘作业面的状态。
24、进一步的,所述装置还包括感知模块,所述感知模块用于感知所述挖掘设备的挖掘作业面状态提示装置所停靠的装载位的环境信息。
25、第四方面,本公开实施例提供了一种电子设备,包括处理器、存储器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现前述任一项所述方法的步骤。
26、第五方面,本公开实施例提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现前述任一项所述方法的步骤。
27、本公开实施例提供了一种挖掘设备的挖掘作业面状态提示系统和方法,通过获取无人驾驶车辆所停靠的装载区的高程信息,并将该高程信息发送给挖掘设备的协同作业系统,从而向所述挖掘设备的操作人员提示作业面的状态,当所述挖掘设备的挖掘作业面不符合要求时,并及时修整,提高生产效率。
技术特征:
1.一种挖掘设备的挖掘作业面状态提示系统,其特征在于,包括:
2.根据权利要求1所述的系统,其特征在于,所述第一通信模块或第二通信模块包括v2v和/或v2n模块中的至少一个。
3.根据权利要求1或2所述的系统,其特征在于,所述定位模块包括gps定位模块、imu定位模块或者差分定位(rtk)模块中的至少一个。
4.根据权利要求1所述的系统,其特征在于,所述无人驾驶车辆包括高精地图模块,所述高精地图模块能够提供所述装载位的相关信息。
5.根据权利要求1所述的系统,其特征在于,所述系统还包括云平台,所述云平台包括高精地图模块和第二通信模块,所述高精地图模块能够向所述无人驾驶车辆提供所述装载位的相关信息,所述第二通信模块用于接收所述第一通信模块发送的所述无人驾驶车辆的停靠位置的高程信息。
6.根据权利要求1所述的系统,其特征在于,所述无人驾驶系统还包括感知系统,所述感知系统用于采集所述挖掘设备的挖掘作业面的点云数据,从而获取所述挖掘设备的挖掘作业面的变化信息。
7.根据权利要求1所述的系统,其特征在于,所述定位模块仅在所述无人驾驶车辆停靠在所述停靠位置时获取所述高程信息。
8.根据权利要求1所述的系统,其特征在于,所述定位模块基于所述定位模块检测的自身高程以及自身离地高度获取所述无人驾驶车辆的停靠位置的高程信息。
9.根据权利要求1所述的系统,其特征在于,所述定位模块设置于所述无人驾驶车辆的车头位置和/或车尾位置。
10.一种挖掘设备的挖掘作业面状态提示方法,其特征在于,包括:
11.根据权利要求10所述的方法,其特征在于,所述方法还包括:将所述无人驾驶车辆的停靠位置的高程信息发送至云平台的高精地图模块。
12.根据权利要求10所述的方法,其特征在于,所述装载位的相关信息由所述无人驾驶车辆的高精地图模块提供。
13.根据权利要求11所述的方法,其特征在于,所述装载位的相关信息由所述云平台的高精地图模块提供。
14.根据权利要求10或11所述的方法,其特征在于,所述方法还包括:当所述挖掘设备对所述挖掘作业面进行修整后,重新计算所述无人驾驶车辆的停靠位置的高程信息,并发送至所述云平台进行更新。
15.一种挖掘设备的挖掘作业面状态提示装置,其特征在于,包括:
16.根据权利要求15所述的装置,其特征在于,所述装置还包括感知模块,所述感知模块用于感知所述挖掘设备的挖掘作业面状态提示装置所停靠的装载位的环境信息。
17.一种电子设备,包括处理器、存储器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求10至14中任一项所述方法的步骤。
18.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求10至14中任一项所述方法的步骤。
技术总结
本公开实施例提供了一种挖掘设备的挖掘作业面状态提示系统、方法及装置,该系统包括:无人驾驶车辆,该无人驾驶车辆包括定位模块以及第一通信模块,该定位模块用于获取无人驾驶车辆的停靠位置的高程信息,该第一通信模块用于将无人驾驶车辆的停靠位置的高程信息发送给挖掘设备;挖掘设备协同作业系统,该挖掘设备协同作业系统包括人机交互模块和第二通信模块,该第二通信模块用于接收无人驾驶车辆的第一通信模块发送的无人驾驶车辆的停靠位置的高程信息,该人机交互模块用于对第二通信模块接收的高程信息进行显示,从而向挖掘设备的操作人员提示挖掘设备的挖掘作业面的状态,从而及时修整,提高生产效率。
技术研发人员:张阁,张磊,惠杰,王大伟,徐美娟
受保护的技术使用者:北京易控智驾科技有限公司
技术研发日:
技术公布日:2024/3/5
- 还没有人留言评论。精彩留言会获得点赞!