一种挖泥船施工系统的制作方法
本申请涉及自动控制,尤其是涉及一种挖泥船施工系统。
背景技术:
1、挖泥船通常包括船体控制室和挖泥装置的挖泥控制室,船体控制室用于对船体的位置、航向和水文等信息进行汇总,船体控制室里的工作人员可以直接根据上述信息调整船的航速及航向。挖泥控制室设置在靠近挖泥装置的位置,挖泥控制室中的工作人员可以对挖泥装置进行控制从而进行挖泥。
2、相关技术在挖泥过程中船体控制室是中的工作人员将观察到的相关数据向挖泥控制室中的工作人员反馈,挖泥控制室中的工作人员基于相关数据对挖泥装置进行操作。
3、然而,相关技术在挖泥过程中需要挖泥控制室中的工作人员和船体控制室中的工作人员互相配合才能完成挖泥工作,这就会导致挖泥成本高的问题。
技术实现思路
1、为了有助于改善挖泥成本高的问题,本申请提供了一种挖泥船施工系统。
2、第一方面,本申请提供一种挖泥船施工系统,采用如下的技术方案:
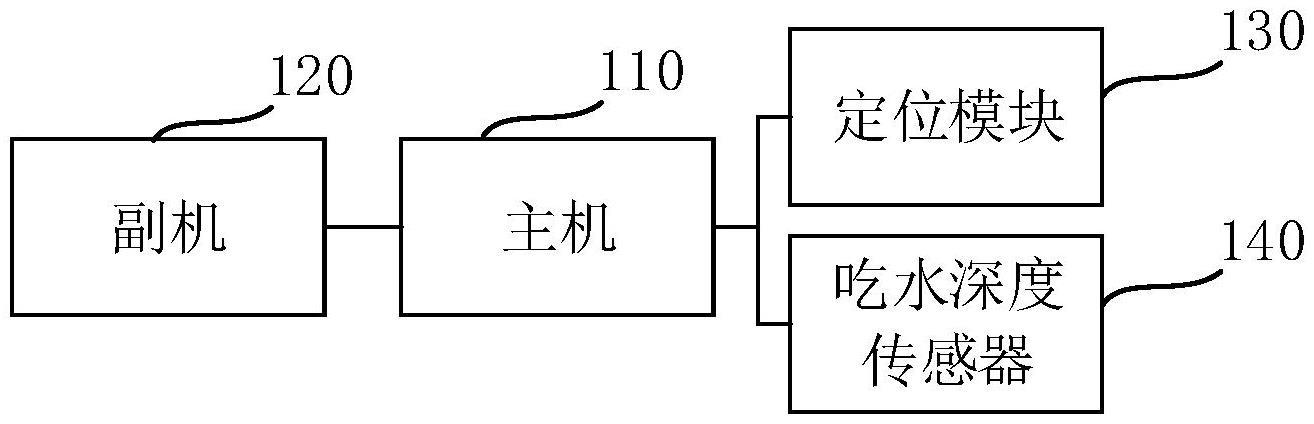
3、一种挖泥船施工系统,所述系统包括:主机、副机、定位模块和吃水深度传感器;所述主机设置在所述挖泥船的船体控制室内,所述副机设置在所述挖泥船的挖泥装置的挖泥控制室内;
4、所述主机包括第一输入模块、第一信息处理模块和第一输出模块;所述定位模块和所述吃水深度传感器通过所述第一输入模块与所述第一信息处理模块信号连接,以供所述第一信息处理模块对所述定位模块和所述吃水深度传感器传输的数据进行处理;所述第一信息处理模块还与所述第一输出模块信号连接,用于通过所述第一输出模块输出所述处理结果;
5、所述副机包括第二输入模块、第二信息处理模块和第一显示模块;所述第二信息处理模块分别与所述第二输入模块和所述第一显示模块信号连接,所述第二输入模块还与所述第一输出模块通信相连。
6、通过采用上述技术方案,可以解决挖泥成本高的问题,由于可以基于第一输出模块与第二输入模块之间的通信连接将船体控制室中的信息传输至位于挖泥控制室的副机中,并通过副机的第一显示组件显示,如此挖泥操作室中的工作人员在挖泥过程中可以直接观察到相关信息,从而可以减小挖泥过程中对船体控制室中的人员需求,进而可以减小挖泥成本。
7、同时,由于主机通过第一信息处理模块对定位模块和吃水深度传感器传输的数据进行处理,然后将处理结果通过第一数据模块输出至副机,如此可以便于副机通过第一显示组件显示数据,同时可以减小第一输出模块与第二输入模块之间信道的要求,进而减小系统的部署成本。
8、可选的,所述系统还包括潮位仪,所述潮位仪与所述第一信息处理模块信号连接,用于接收所述定位模块和所述吃水深度传感器传输的数据,并向所述第一信息处理模块返回处理结果。
9、通过采用上述技术方案,由于将接收定位模块和吃水深度传感器传输的数据传输至潮位仪,并通过潮位仪回传数据,因此可以提高潮位仪计算出的潮位的精准度,从而可以提高下斗深度评估的准确性,避免挖泥过程中资源的浪费。
10、可选的,所述潮位仪包括第二显示模块。
11、通过采用上述技术方案,由于潮位仪包括第二显示模块,因此可以实时显示潮位数据从而可以便于船体控制室内的工作人员对潮位数据进行监控。
12、可选的,所述定位模块包括第一定位模块和第二定位模块,所述第一定位模块的安装位置与所述第二定位模块的安装位置不同;
13、所述第一定位模块和所述第二定位模块分别与所述第一输入模块信号连接。
14、通过采用上述技术方案,可以基于第一定位模块的采集的定位信号确定第一定位模块的位置,基于第二定位模块采集的定位信号确定第二定位模块的位置,从而可以基于第一定位模块的位置信息和第二定位模块的位置信息确定船体的朝向。
15、可选的,所述第二定位模块与所述挖泥船左舷的距离和所述第一定位模块与所述挖泥船左舷的距离相同。
16、通过采用上述技术方案,由于第二定位模块与挖泥船左舷的距离和第一定位模块与挖泥船左舷的距离相同,如此第一定位模块的位置信息和第二定位模块的位置信息仅在航向上存在偏差,如此可以便于基于第一定位模块的位置与第二定位模块的位置确定船体的朝向。
17、可选的,所述第一定位模块与所述挖泥船船头的距离大于所述第二定位模块与所述挖泥船船头的距离。
18、通过采用上述技术方案,第一定位模块的位置指向第二定位模块的位置方向即为船体的朝向,可以便于基于第一定位模块的位置与第二定位模块的位置确定船体的朝向。
19、可选的,所述第一输出模块和所述第二输入模块为无线通信模块。
20、通过采用上述技术方案,可以避免船体上走线困难导致副机部署困难的问题,从而可以便于副机的部署。
21、可选的,所述第一输入模块包括有线输入端口和无线输入端口,所述定位模块与所述有线输入端口相连,所述吃水深度传感器与所述无线输入端口相连。
22、通过采用上述技术方案,由于定位模块以有线方式进行信号传输,如此可以确定定位信号的稳定性,可以提高位置确定的精度,而由于吃水深度传感器的部署位置较为特殊,因此采用无线方式进行信号传输可以便于吃水深度传感器的部署。
23、可选的,所述副机还包括第三输入模块,所述第三输入模块与所述第二信息处理模块信号连接,所述第二信息处理模块用于对所述第二输入模块与所述第三输入模块传输的数据进行处理,并将处理结果传输至第一显示模块。
24、通过采用上述技术方案,由于副机还包括第三输入模块,从而可以便于对副机的信息获取渠道进行拓展,从而可以丰富副机的功能,提高副机的实用性。
25、可选的,所述吃水深度传感器包括两个以上,不同所述吃水深度传感器的安装位置不同。
26、通过采用上述技术方案,可以结合不同吃水深度传感的安装位置对不同吃水深度传感器采集的数据进行校验和融合,从而提高确定出的船体吃水深度的准确性。
27、综上所述,本申请包括以下至少一种有益技术效果:
28、1. 可以解决挖泥成本高的问题,由于可以基于第一输出模块与第二输入模块之间的通信连接将船体控制室中的信息传输至位于挖泥控制室的副机中,并通过副机的第一显示组件显示,如此挖泥操作室中的工作人员在挖泥过程中可以直接观察到相关信息,从而可以减小挖泥过程中对船体控制室中的人员需求,进而可以减小挖泥成本。
29、2. 由于主机通过第一信息处理模块对定位模块和吃水深度传感器传输的数据进行处理,然后将处理结果通过第一数据模块输出至副机,如此可以便于副机通过第一显示组件显示数据,同时可以减小第一输出模块与第二输入模块之间信道的要求。
技术特征:
1.一种挖泥船施工系统,其特征在于,所述系统包括:主机(110)、副机(120)、定位模块(130)和吃水深度传感器(140);所述主机(110)设置在挖泥船的船体控制室内,所述副机(120)设置在所述挖泥船的挖泥装置的挖泥控制室内;
2.根据权利要求1所述的系统,其特征在于,所述系统还包括潮位仪(150),所述潮位仪(150)与所述第一信息处理模块(112)信号连接,用于接收所述定位模块(130)和所述吃水深度传感器(140)传输的数据,并向所述第一信息处理模块(112)返回处理结果。
3.根据权利要求2所述的系统,其特征在于,所述潮位仪(150)包括第二显示模块。
4.根据权利要求1所述的系统,其特征在于,所述定位模块(130)包括第一定位模块(130a)和第二定位模块(130b),所述第一定位模块(130a)的安装位置与所述第二定位模块(130b)的安装位置不同;
5.根据权利要求4所述的系统,其特征在于,所述第二定位模块(130b)与所述挖泥船左舷的距离和所述第一定位模块(130a)与所述挖泥船左舷的距离相同。
6.根据权利要求5所述的系统,其特征在于,所述第一定位模块(130a)与所述挖泥船船头的距离大于所述第二定位模块(130b)与所述挖泥船船头的距离。
7.根据权利要求1所述的系统,其特征在于,所述第一输出模块(113)和所述第二输入模块(121)为无线通信模块。
8.根据权利要求1所述的系统,其特征在于,所述第一输入模块(111)包括有线输入端口和无线输入端口,所述定位模块(130)与所述有线输入端口相连,所述吃水深度传感器(140)与所述无线输入端口相连。
9.根据权利要求1所述的系统,其特征在于,所述副机(120)还包括第三输入模块(124),所述第三输入模块(124)与所述第二信息处理模块(122)信号连接,所述第二信息处理模块(122)用于对所述第二输入模块(121)与所述第三输入模块(124)传输的数据进行处理,并将处理结果传输至第一显示模块(123)。
10.根据权利要求1所述的系统,其特征在于,所述吃水深度传感器(140)包括两个以上,不同所述吃水深度传感器(140)的安装位置不同。
技术总结
本申请涉及自动控制技术领域,提供了一种挖泥船施工系统,包括:主机、副机、定位模块和吃水深度传感器;主机设置在船体控制室内,副机设置在挖泥装置的挖泥控制室内;定位模块和吃水深度传感器与主机信号连接;副机包括第二输入模块、第二信息处理模块和第一显示模块;第二信息处理模块分别与第二输入模块和第一显示模块信号连接,第二输入模块还与主机通信相连。可以解决挖泥成本高的问题,由于可以将船体控制室中的信息传输至位于挖泥控制室的副机中,并通过第一显示组件显示,从而可以减小挖泥过程中对船体控制室中的人员需求,进而可以减小挖泥成本。
技术研发人员:周忠治,李志建,林志强,周子皓,蔡金平,蔡东周,谢怀阳
受保护的技术使用者:中交第三航务工程局有限公司
技术研发日:20230105
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!