一种可精确控制打桩深度的打桩机器人的制作方法
本技术涉及一种可精确控制打桩深度的打桩机器人,属于自动化控制。
背景技术:
1、因为地面建筑物如果要建在地面上,地面要承受很大的压力,就必须保证地面有足够的抵抗压力的强度,这个往往很难做到。所以就必须对承受建筑物的地面进行加固或者改善地面的承受方式,所以就想到在地基上打桩,让建筑物的大部分重量通过桩传到地面以下很深的位置,因为这个位置的地基比地面承受能力大得多。关于桩要打多深,这要看地底下的地层分布情况,如果能足够承受建筑物的压力,桩打到此了,如果不能,还得继续加深。
2、工程打桩的类型分为,1、挤土桩在成桩过程中,桩周围的土被挤密或挤开,土的原始结构遭到破坏,土的工程性质发生很大变化。这类桩主要有挤土灌注桩和打入式预制桩等。2、非挤土桩在成桩过程中,使桩形坑形成,因而桩周围的土很少受到扰动。这类桩主要有各种形式的挖孔或钻孔桩、井筒管桩和预钻孔埋桩等。3、部分挤土桩在成桩过程中,桩周围的土仅受到轻微的扰动,土的原状结构和工程性质没有明显变化。这类桩主要有预钻孔打入式预制桩、打入式敞口桩和部分挤土灌注桩等。
3、中国发明专利公开了名称为,一种水产养殖用水域打桩节能机器人,申请公布号cn112502147a,其结构描述为,所述机器人包括:壳体,所述壳体为圆柱壳体,所述壳体内自上而下分别设置有冲击单元、电机,所述冲击单元的基座固定在所述壳体内,所述冲击单元的冲击端与所述电机连接,所述冲击单元在收到激发信号时所述冲击端能够以预定的加速度远离所述基座,所述壳体内侧壁上还固定设置有滑轨,所述电机的外侧壳体一体成型设置有滑块,使得所述电机能够沿着所述滑轨移动,所述壳体的底部设置有通孔;长轴,所述长轴的一端固定连接在所述电机的转子上,所述长轴的另一端穿过所述通孔,所述通孔处设置有密封结构,所述长轴的中部设置有桨叶。
4、该专利的缺点在于,机器人移动不方便,不能精确控制打桩深度,结构设计只能用作水域打桩,其使用功能单一。
技术实现思路
1、为了解决现有技术中存在的问题,本实用新型的目的在于提供一种可精确控制打桩深度的打桩机器人,由plc控制器编程统一控制六轴机器人和打桩装置的启动与停止,打桩装置的打桩深度由plc控制器编码控制,实现精确控制打桩;电缆线盘上绕有长度为10米的线缆,方便常接线;支撑底板的一侧垂直设有侧挡板,侧挡板的外侧面通过螺钉固定设有操作箱和手推柄,支撑底板的底部通过螺钉设有四组相互对称的移动滑轮,方便移动位置,用途方泛。
2、为达到上述目的,本实用新型提供如下技术方案
3、一种可精确控制打桩深度的打桩机器人,包括支撑底板、打桩装置、六轴机器人、电缆线盘;所述的支撑底板的一侧垂直设有侧挡板,侧挡板的外侧面通过螺钉固定设有操作箱和手推柄,所述的支撑底板的上方分别固定设有电源控制箱和六轴机器人,电源控制箱的顶部通过螺钉固定设有电缆线盘,所述的六轴机器人的第六关节处通过连接法兰与打桩装置固定连接。
4、所述的操作箱上顶部设有操作面板,操作面板上设有控制按钮,控制按钮通过电源线与操作箱内部固定的电路板连接。
5、所述的电源控制箱内部设有控制开关和plc控制器。
6、所述的六轴机器人和打桩装置通过电源线和数据线与控制开关和plc控制器连接。
7、所述的电缆线盘上绕有长度为10米的线缆,其线缆的一端与电源控制箱内部的控制开关连接。
8、所述的操作箱内部电路板通过电源线与电源控制箱内部的控制开关连接。
9、所述的支撑底板的底部通过螺钉设有四组相互对称的移动滑轮。
10、所述的打桩装置包括电动机、连接套筒、外套管、螺旋轴;所述的电动机的下端通过连接套筒与外套管连接,其电动机的主轴向下与连接套筒内部的活动旋转的联轴器上端连接,联轴器的下端则与螺旋轴连接。
11、所述的外套管的侧面开设有槽。
12、本实用新型的有益效果在于
13、1、操作箱1上顶部设有操作面板,操作面板上设有控制按钮,控制按钮通过电源线与操作箱内部固定的电路板连接,电源控制箱内部设有控制开关和plc控制器,六轴机器人和打桩装置通过电源线和数据线与控制开关和plc控制器连接,电缆线盘上绕有长度为10米的线缆,其线缆的一端与电源控制箱内部的控制开关连接,操作箱内部电路板通过电源线与电源控制箱内部的控制开关连接。由plc控制器编程统一控制六轴机器人和打桩装置的启动与停止,打桩装置的打桩深度由plc控制器编码控制,实现精确控制打桩。
14、2、电缆线盘上绕有长度为10米的线缆,方便日常接线。
15、3、支撑底板的一侧垂直设有侧挡板,侧挡板的外侧面通过螺钉固定设有操作箱和手推柄,支撑底板的底部通过螺钉设有四组相互对称的移动滑轮,方便移动位置,用途方泛。
技术特征:
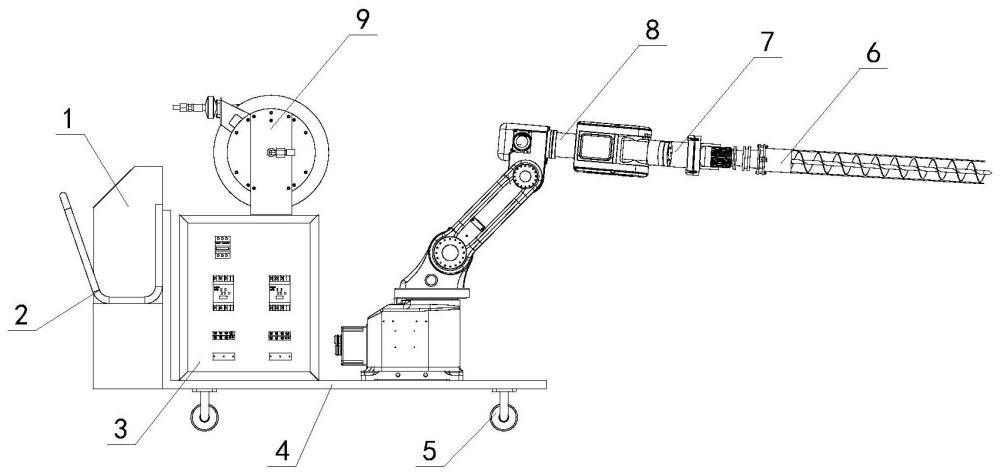
1.一种可精确控制打桩深度的打桩机器人,其特征在于:包括支撑底板(4)、打桩装置(6)、六轴机器人(8)、电缆线盘(9);所述的支撑底板(4)的一侧垂直设有侧挡板,侧挡板的外侧面通过螺钉固定设有操作箱(1)和手推柄(2),所述的支撑底板(4)的上方分别固定设有电源控制箱(3)和六轴机器人(8),电源控制箱(3)的顶部通过螺钉固定设有电缆线盘(9),所述的六轴机器人(8)的第六关节处通过连接法兰(7)与打桩装置(6)固定连接。
2.根据权利要求1所述的一种可精确控制打桩深度的打桩机器人,其特征在于:所述的操作箱(1)上顶部设有操作面板,操作面板上设有控制按钮,控制按钮通过电源线与操作箱(1)内部固定的电路板连接。
3.根据权利要求1所述的一种可精确控制打桩深度的打桩机器人,其特征在于:所述的电源控制箱(3)内部设有控制开关和plc控制器。
4.根据权利要求1所述的一种可精确控制打桩深度的打桩机器人,其特征在于:所述的六轴机器人(8)和打桩装置(6)通过电源线和数据线与控制开关和plc控制器连接。
5.根据权利要求1所述的一种可精确控制打桩深度的打桩机器人,其特征在于:所述的电缆线盘(9)上绕有长度为10米的线缆,其线缆的一端与电源控制箱(3)内部的控制开关连接。
6.根据权利要求2所述的一种可精确控制打桩深度的打桩机器人,其特征在于:所述的操作箱(1)内部电路板通过电源线与电源控制箱(3)内部的控制开关连接。
7.根据权利要求1所述的一种可精确控制打桩深度的打桩机器人,其特征在于:所述的支撑底板(4)的底部通过螺钉设有四组相互对称的移动滑轮(5)。
8.根据权利要求1所述的一种可精确控制打桩深度的打桩机器人,其特征在于:所述的打桩装置(6)包括电动机(61)、连接套筒(62)、外套管(63)、螺旋轴(64);所述的电动机(61)的下端通过连接套筒(62)与外套管(63)连接,其电动机(61)的主轴向下与连接套筒(62)内部的活动旋转的联轴器上端连接,联轴器的下端则与螺旋轴(64)连接。
9.根据权利要求8所述的一种可精确控制打桩深度的打桩机器人,其特征在于:所述的外套管(63)的侧面开设有槽。
技术总结
本技术涉及一种可精确控制打桩深度的打桩机器人,属于自动化控制技术领域,支撑底板的一侧垂直设有侧挡板,侧挡板的外侧面通过螺钉固定设有操作箱和手推柄,所述的支撑底板的上方分别固定设有电源控制箱和六轴机器人,电源控制箱的顶部通过螺钉固定设有电缆线盘,六轴机器人的第六关节处通过连接法兰与打桩装置固定连接;由PLC控制器编程统一控制六轴机器人和打桩装置的启动与停止,打桩装置的打桩深度由PLC控制器编码控制,实现精确控制打桩;电缆线盘上绕有长度为10米的线缆,支撑底板的一侧垂直设有侧挡板,侧挡板的外侧面通过螺钉固定设有操作箱和手推柄,支撑底板的底部通过螺钉设有四组相互对称的移动滑轮,方便移动位置。
技术研发人员:许盈辰
受保护的技术使用者:苏州毕诚智造科技有限公司
技术研发日:20230515
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!