一种矿用智能装载挖掘机器人的制作方法
本技术涉及一种机器人,具体为矿用智能装载挖掘机器人,属于一种矿用机器人。
背景技术:
1、煤矸石是煤炭开采和洗选加工过程中排出一种固体废弃物,现有煤矸石处理技术存在着诸多问题,如煤矸石井上综合处理厂矿分散不集中,对于煤矸石需求不定时、需求量不确定,不能稳定处理煤矸石,受煤矸石运输距离及用户范围等限制,使用不长久、处理量小,不能满足规模化的煤矸石处理要求等。因此需要在现有综合机械化固体充填采煤技术的基础上,改变充填目的和工艺、改进充填采煤关键设备, 提高充填工作面的自动化程度等,实现煤矸石的井下集中化、规模化和智能化处理,从而实现高效的煤矸石充填。目前的煤矸石井下集中化处理采用的是挖掘机,其挖掘机主体具有行走机构,供挖掘机移动,目前一般是履带式底盘,在挖掘机主体前部具有通过机械臂安装的挖掘工具,挖掘工具一般有:铲斗和破碎锤,其机械臂包括旋转设置在挖掘机主体上的大臂,大臂的另一端设置有小臂,挖掘工具设置在小臂的另一端,大臂、小臂以及挖掘工具均由液压系统驱动,这个驱动包括大臂的旋转;大臂和小臂之间的伸展、收缩;以及挖掘工具的挖掘工作。目前,挖掘机需要人工在井下操作,劳动强度大,还具有一定的危险性。
技术实现思路
1、本实用新型的目的在于提供一种能自主工作的矿用智能装载挖掘机器人。
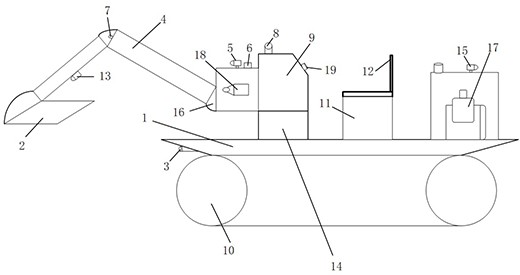
2、为了解决上述问题,本实用新型所涉及的矿用智能装载挖掘机器人采用以下技术方案:一种矿用智能装载挖掘机器人,包括挖掘机主体,挖掘机主体具有行走机构,挖掘机主体前部具有通过机械臂安装的挖掘工具,机械臂包括旋转设置在挖掘机主体上的大臂,大臂的另一端设置有小臂,小臂的另一端设置有挖掘工具,大臂、小臂以及挖掘工具均由液压系统驱动,所述的大臂和小臂的关节处设置有角度位移传感器,机械臂通过旋转编码器与挖掘机主体旋转设置,整车控制系统与大臂、小臂以及挖掘工具均通过液压系统控制相连,所述角度位移传感器以及旋转编码器与整车控制系统反馈相连。
3、所述的整车控制系统通过设置在对应液压系统中的电液比例伺服阀与液压系统控制相连。
4、所述的小臂内侧设置有第一摄像头,第一摄像头与整车控制系统传输相连。
5、所述的行走机构包括由液压驱动发动机驱动的履带式底盘,所述整车控制系统与液压驱动发动机控制相连。
6、所述的整车控制系统具有车辆纵横耦合控制器以及纵向控制器和横向控制器,纵向控制器控制挖掘机主体直行,横向控制器控制挖掘机主体转向。
7、所述的挖掘机主体前部设置有超声波雷达和/或激光雷达,超声波雷达和/或激光雷达与整车控制系统传输相连。
8、所述的挖掘机主体前部还设置有uwb、惯导组合定位模块,uwb、惯导组合定位模块与整车控制系统传输相连。
9、所述的整车控制系统具有无线通信模块,所述无线通信模块用于与远程遥控控制终端相连。
10、所述的挖掘机主体前部和后部分别设置有第二摄像头和第三摄像头,第二摄像头朝向前方,第三摄像头朝向后方,第二摄像头和第三摄像头分别与整车控制系统传输相连。
11、所述的挖掘机主体前部和后部分别设置有第一探照灯和第二探照灯,第一探照灯朝向前方,第二探照灯朝向后方。
12、本实用新型的大臂和小臂的关节处设置有角度位移传感器,机械臂通过旋转编码器与挖掘机主体旋转设置,整车控制系统与大臂、小臂以及挖掘工具均通过液压系统控制相连,所述角度位移传感器以及旋转编码器与整车控制系统反馈相连,整车控制系统通过控制液压系统可以控制大臂小臂以及挖掘工具的工作,并通过角度位移传感器以及旋转编码器的反馈保证运动的到位,实现自主工作。
13、本实用新型的整车控制系统通过设置在对应液压系统中的电液比例伺服阀与液压系统控制相连,电液比例伺服阀可以将机械反馈变为点反馈,使用方便,反馈精准,还可以按给定的电压会电流信号连续地按比例地远距离控制流体的方向、压力和流量,对液压系统的控制便捷、精准,从而可以控制智能装载挖掘机器人精准地工作。
14、本实用新型的小臂内侧设置有第一摄像头,第一摄像头与整车控制系统传输相连,通过第一摄像头可以监控挖掘工具的工作情况。
15、本实用新型的行走机构包括由液压驱动发动机驱动的履带式底盘,所述整车控制系统与液压驱动发动机控制相连,整车控制系统可以控制智能装载挖掘机器人行走。
16、本实用新型整车控制系统具有车辆纵横耦合控制器以及纵向控制器和横向控制器,纵向控制器控制挖掘机主体直行,横向控制器控制挖掘机主体转向,能够全方位的控制智能装载挖掘机器人的移动。
17、本实用新型的挖掘机主体前部设置有超声波雷达和/或激光雷达,超声波雷达和/或激光雷达与整车控制系统传输相连,超声波雷达和/或激光雷达可以获得与前方障碍物的距离信息,并将数据传输给整车控制系统。
18、本实用新型的挖掘机主体前部还设置有uwb、惯导组合定位模块,uwb、惯导组合定位模块与整车控制系统传输相连,采用矿下uwb、惯导组合定位装置完成定位,可实现机器人的自主导航和避障。
19、本实用新型的整车控制系统具有无线通信模块,无线通信模块用于与远程遥控控制终端相连,可实现机器人的远程控制。
技术特征:
1.一种矿用智能装载挖掘机器人,包括挖掘机主体,挖掘机主体具有行走机构,挖掘机主体前部具有通过机械臂安装的挖掘工具,机械臂包括旋转设置在挖掘机主体上的大臂,大臂的另一端设置有小臂,小臂的另一端设置有挖掘工具,大臂、小臂以及挖掘工具均由液压系统驱动,其特征在于,所述的大臂和小臂的关节处设置有角度位移传感器,机械臂通过旋转编码器与挖掘机主体旋转设置,整车控制系统与大臂、小臂以及挖掘工具均通过液压系统控制相连,所述角度位移传感器以及旋转编码器与整车控制系统反馈相连。
2.根据权利要求1所述的矿用智能装载挖掘机器人,其特征在于,所述的整车控制系统通过设置在对应液压系统中的电液比例伺服阀与液压系统控制相连。
3.根据权利要求2所述的矿用智能装载挖掘机器人,其特征在于,所述的小臂内侧设置有第一摄像头,第一摄像头与整车控制系统传输相连。
4.根据权利要求3所述的矿用智能装载挖掘机器人,其特征在于,所述的行走机构包括由液压驱动发动机驱动的履带式底盘,所述整车控制系统与液压驱动发动机控制相连。
5.根据权利要求4所述的矿用智能装载挖掘机器人,其特征在于,所述的整车控制系统具有车辆纵横耦合控制器以及纵向控制器和横向控制器,纵向控制器控制挖掘机主体直行,横向控制器控制挖掘机主体转向。
6.根据权利要求5所述的矿用智能装载挖掘机器人,其特征在于,所述的挖掘机主体前部设置有超声波雷达和/或激光雷达,超声波雷达和/或激光雷达与整车控制系统传输相连。
7.根据权利要求6所述的矿用智能装载挖掘机器人,其特征在于,所述的挖掘机主体前部还设置有uwb、惯导组合定位模块,uwb、惯导组合定位模块与整车控制系统传输相连。
8.根据权利要求1-7中任意一项所述的矿用智能装载挖掘机器人,其特征在于,所述的整车控制系统具有无线通信模块,所述无线通信模块用于与远程遥控控制终端相连。
9.根据权利要求8所述的矿用智能装载挖掘机器人,其特征在于,所述的挖掘机主体前部和后部分别设置有第二摄像头和第三摄像头,第二摄像头朝向前方,第三摄像头朝向后方,第二摄像头和第三摄像头分别与整车控制系统传输相连。
10.根据权利要求9所述的矿用智能装载挖掘机器人,其特征在于,所述的挖掘机主体前部和后部分别设置有第一探照灯和第二探照灯,第一探照灯朝向前方,第二探照灯朝向后方。
技术总结
本技术涉及一种矿用智能装载挖掘机器人,其挖掘机主体前部具有通过机械臂安装的挖掘工具,机械臂包括旋转设置在挖掘机主体上的大臂,大臂的另一端设置有小臂,小臂的另一端设置有挖掘工具,大臂、小臂以及挖掘工具均由液压系统驱动,大臂和小臂的关节处设置有角度位移传感器,机械臂通过旋转编码器与挖掘机主体旋转设置,整车控制系统与大臂、小臂以及挖掘工具均通过液压系统控制相连,角度位移传感器以及旋转编码器与整车控制系统反馈相连。本技术的整车控制系统通过控制液压系统可以控制大臂小臂以及挖掘工具的工作,并通过角度位移传感器以及旋转编码器的反馈保证运动的到位,实现自主工作。
技术研发人员:李春鹏,张佳,王春鹏,贾中华,武学艺,张政,张健,张斌,尤沛沅
受保护的技术使用者:郑州恒达智控科技股份有限公司
技术研发日:20230707
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!