一种钢筋自动扶正装置的制作方法
本技术涉及钢筋扶正领域,具体是一种钢筋自动扶正装置。
背景技术:
1、桩基作为结构受力体系中非常重要的一部分,其施工质量的重要性不言而喻。桩基的中心偏位是否在规范范围内则是判断一根桩基是否合格的首要标准。而钢筋笼安装是钻孔灌注桩施工的一个重要步骤,若桩基钢筋笼安装中心点偏位过大,会导致桩基产生偏心受压而降低桩基承受荷载的能力,存在着极大的质量隐患,因此桩基施工中需要格外重视钢筋笼安装定位。钢筋笼的定位包括标高定位和水平对中定位,钢筋笼的水平对中定位是指钢筋笼的中心轴线与钻孔的中心轴线重叠定位或者处于规定范围内的偏心定位,传统的定位方式是在钢筋笼每个加强箍筋四周对称设置耳环或垫块,通过耳环或垫块与钻孔壁接触进行定位,但由于孔壁过软,耳环、垫块有可能陷入一侧孔壁内,导致钢筋笼偏位。再者,当桩基空桩部分≥2m或位于泥浆面以下时,桩基钢筋笼定位困难,传统的做法是在原设计钢筋笼长度的基础上,接长钢筋笼至钢护筒顶标高进行对中,但这种方法存在钢筋用量大,不可重复利用等弊端,不利于工程的成本控制。
2、为解决上述问题,专利号cn202120710475.5中公布了一种桩基钢筋笼扶正装置,通过采用手摇推进杆推动扶正杆,扶正杆带动弧形扶正抱卡实现对钢筋笼的定位,只需精准确定固定支架的位置,就可准确扶正钢筋笼,使其水平对中不偏位。而固定支架位于地面,准确定位较为方便,因此,采用本实用新型下放桩基钢筋笼,便于桩基钢筋笼水平对中不偏位,能够加快钢筋笼对中定位的速度;并且本实用新型可重复使用、绿色环保、可以节约施工成本。
3、上述专利中公布的钢筋笼扶正装置需要人工一个个手摇推进杆推动扶正杆来通过抱卡实现对钢筋笼的定位,即浪费人力,且无法确保四面的推进杆推进距离相等,扶正精度低,且仅可用于扶正抱卡能抱住的尺寸的钢筋笼,使用范围窄。
技术实现思路
1、本实用新型的目的在于提供一种钢筋自动扶正装置,本实用新型公开的钢筋自动扶正装置可自动化扶正钢筋笼,且可同步驱动四面的夹件同步进退等同的距离,不需要人工手动一个个调整,扶正精度高,可用于扶正一定范围内任意尺寸的钢筋笼使用范围广,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
3、一种钢筋自动扶正装置,包括下方框,所述下方框四面中间底端均转动连接有齿轮柱,所述其中一个齿轮柱的动力输入端连接有电动机的动力输出端,所述四个齿轮柱顶部均通过转环底部呈圆周等距阵列焊接的第二锯齿啮合连接有转环,所述转环顶部焊接有涡状齿且通过涡状齿啮合连接有底部焊接有若干个第一锯齿的横矩条,所述四组横矩条均滑动连接在其对应边的下方框中间顶端。
4、作为本实用新型进一步的方案:所述四组横矩条内端顶部焊接有纵矩条,所述纵矩条表面焊接有若干根抵杆。
5、作为本实用新型进一步的方案:所述下方框外侧壁四角均焊接有支腿,所述支腿顶部内侧壁焊接有上方框。
6、作为本实用新型进一步的方案:所述下方框四面中间底端均焊接有耳座,所述耳座内侧壁通过转杆转动连接有齿轮柱。
7、作为本实用新型进一步的方案:所述横矩条滑动连接在滑座内侧壁,所述滑座焊接在下方框四边顶部。
8、作为本实用新型进一步的方案:所述横矩条外端焊接有限位片。
9、与现有技术相比,本实用新型的有益效果是:
10、本实用新型公开的钢筋自动扶正装置可自动化扶正钢筋笼,且可同步驱动四面的夹件同步进退等同的距离,不需要人工手动一个个调整,扶正精度高,可用于扶正一定范围内任意尺寸的钢筋笼使用范围广,解决上述专利中公布的钢筋笼扶正装置需要人工一个个手摇推进杆推动扶正杆来通过抱卡实现对钢筋笼的定位,即浪费人力,且无法确保四面的推进杆推进距离相等,扶正精度低,且仅可用于扶正抱卡能抱住的尺寸的钢筋笼,使用范围窄的问题。
技术特征:
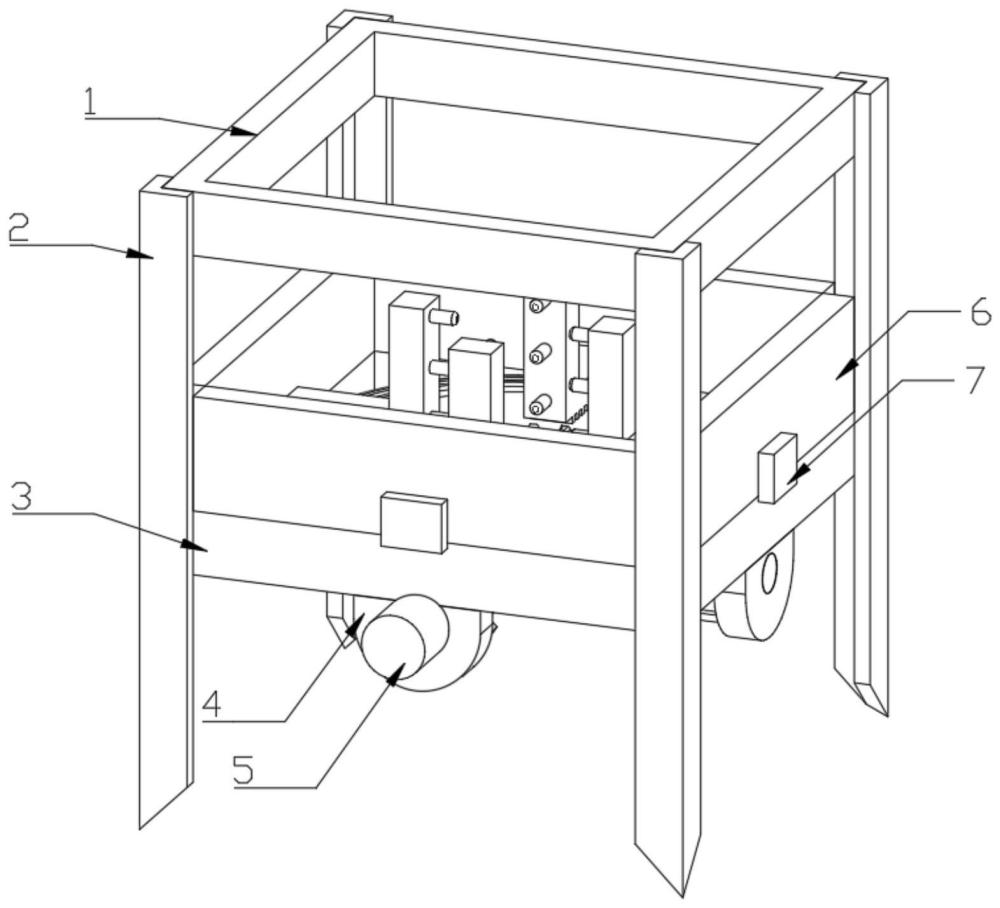
1.一种钢筋自动扶正装置,包括下方框(3),其特征在于:所述下方框(3)四面中间底端均转动连接有齿轮柱(15),所述其中一个齿轮柱(15)的动力输入端连接有电动机(5)的动力输出端,所述四个齿轮柱(15)顶部均通过转环(8)底部呈圆周等距阵列焊接的第二锯齿(16)啮合连接有转环(8),所述转环(8)顶部焊接有涡状齿(9)且通过涡状齿(9)啮合连接有底部焊接有若干个第一锯齿(10)的横矩条(11),所述四组横矩条(11)均滑动连接在其对应边的下方框(3)中间顶端。
2.根据权利要求1所述的钢筋自动扶正装置,其特征在于:所述四组横矩条(11)内端顶部焊接有纵矩条(12),所述纵矩条(12)表面焊接有若干根抵杆(13)。
3.根据权利要求1所述的钢筋自动扶正装置,其特征在于:所述下方框(3)外侧壁四角均焊接有支腿(2),所述支腿(2)顶部内侧壁焊接有上方框(1)。
4.根据权利要求1所述的钢筋自动扶正装置,其特征在于:所述下方框(3)四面中间底端均焊接有耳座(4),所述耳座(4)内侧壁通过转杆(14)转动连接有齿轮柱(15)。
5.根据权利要求1所述的钢筋自动扶正装置,其特征在于:所述横矩条(11)滑动连接在滑座(6)内侧壁,所述滑座(6)焊接在下方框(3)四边顶部。
6.根据权利要求5所述的钢筋自动扶正装置,其特征在于:所述横矩条(11)外端焊接有限位片(7)。
技术总结
本技术公开了一种钢筋自动扶正装置,属于钢筋扶正技术领域,包括下方框,所述下方框四面中间底端均转动连接有齿轮柱,所述其中一个齿轮柱的动力输入端连接有电动机的动力输出端,所述四个齿轮柱顶部均通过转环底部呈圆周等距阵列焊接的第二锯齿啮合连接有转环,所述转环顶部焊接有涡状齿且通过涡状齿啮合连接有底部焊接有若干个第一锯齿的横矩条,所述四组横矩条均滑动连接在其对应边的下方框中间顶端,本技术公开的钢筋自动扶正装置可自动化扶正钢筋笼,且可同步驱动四面的夹件同步进退等同的距离,不需要人工手动一个个调整,扶正精度高,可用于扶正一定范围内任意尺寸的钢筋笼使用范围广。
技术研发人员:刘逸,芦关山,刘伟
受保护的技术使用者:哈工领智产教融合(哈尔滨)科技有限公司
技术研发日:20231227
技术公布日:2024/7/23
- 还没有人留言评论。精彩留言会获得点赞!