一种基于5G网络的挖掘机远程遥控系统的制作方法
本发明属于挖掘机控制管理,涉及一种基于5g网络的挖掘机远程遥控系统。
背景技术:
1、挖掘机远程遥控技术是结合无线通信、自动控制和实时视频传输技术,实现对挖掘机进行实时操控。它允许操作者在安全或更有效的位置上操控机器,因此被广泛应用于拆除后的建筑垃圾处理、矿山开采、土方开挖等多种危险施工场所。
2、挖掘机在拆除后的建筑垃圾处理时主要通过挖掘机搭载的摄像头对挖掘机的施工现场进行图像采集,但是目前在进行建筑垃圾处理时对挖掘机的远程控制还存在把控度不足的问题,具体体现在以下几个方面:1、对建筑垃圾的稳定性考虑不足,当前主要识别建筑垃圾的材料以及堆放体积等进行挖掘力度等远程遥控,使得施工现场评估效果的有效性不强,不仅无法保障建筑垃圾的清理效率,还可能导致挖掘机在处理过程中受到额外的挑战,增加设备的磨损和损坏风险。
3、2、对挖掘机远程控制的稳定性考虑不足,当前未根据现场环境以及远程通信控制状态进行细致监测,存在通信延迟,进而可能导致挖掘机在执行任务时出现偏差,无法达到预期的精准度和准确性。
4、3、对挖掘机作业的稳定性考虑不足,当前进行远程挖掘力度等控制时,主要考虑建筑垃圾是否能够被挖掘,忽视了挖掘机作业的稳定性,可能导致挖掘机在处理建筑垃圾时出现倾倒、倾斜或滑动等情况,增加了意外事故发生的风险,同时还可能导致挖掘机在作业过程中需要频繁调整姿态或停止作业,影响了垃圾处理的连续性和效率,降低了作业的生产能力。
技术实现思路
1、鉴于此,为解决上述背景技术中所提出的问题,现提出一种基于5g网络的挖掘机远程遥控系统。
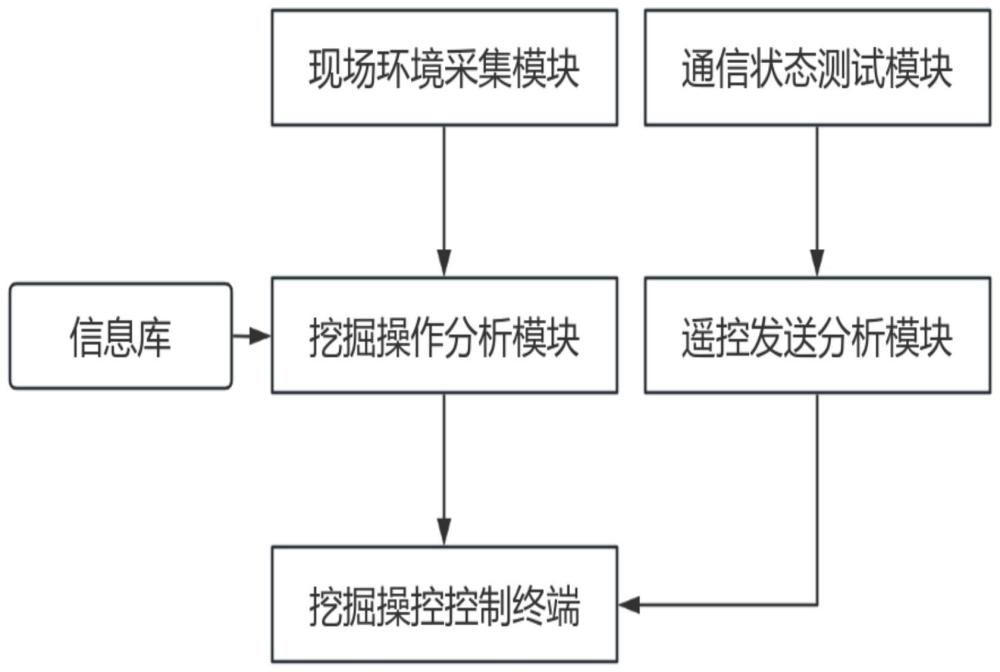
2、本发明的目的可以通过以下技术方案实现:本发明提供一种基于5g网络的挖掘机远程遥控系统,该系统包括:现场环境采集模块,用于将目标建筑垃圾区域记为目标区域,将清理挖掘机记为目标设备,采集目标区域内的建筑垃圾图像和风速。
3、挖掘操作分析模块,用于根据所述建筑垃圾图像,分析目标设备的适宜起始挖掘位置、适宜斗挖掘力和适宜臂挖掘力。
4、通信状态测试模块,用于发送通信测试指令至目标设备,并记录目标设备的通信测试数据和当前设置的通信数据发送频率。
5、遥控发送分析模块,用于根据目标设备的通信测试数据,进行挖掘遥控指令发送调整分析,得到目标设备对应的调整挖掘遥控指令发送频率。
6、信息库,用于存储各材料种类在单位体积下的参照重量,并存储目标清理挖掘机在各挖掘难度等级下各挖掘重量参照的斗挖掘力和臂挖掘力。
7、挖掘操控控制终端,用于基于目标设备的适宜起始挖掘位置、适宜斗挖掘力和适宜臂挖掘力,生成挖掘遥控指令,并根据所述调整挖掘遥控指令发送频率,进行对应遥控指令发送。
8、相较于现有技术,本发明的有益效果如下:(1)本发明通过结合目标区域内的建筑垃圾图像和风速,确认适宜起始挖掘位置、适宜斗挖掘力和适宜臂挖掘力,并根据通信测试数据确认调整挖掘遥控指令发送频率,以此实现挖掘机的远程建筑垃圾清理控制,有效解决了当前对挖掘机远程控制把控度不足的问题,确保了建筑垃圾清理的作业效率,同时还保障了挖掘机远程控制的稳定性和可靠性,并且还提高了挖掘机清理作业的精准度和准确性,进而可以根据不同的情况实现挖掘机的灵活控制,增加挖掘机在不同环境下的适用性。
9、(2)本发明通过识别建筑垃圾图像中建筑垃圾堆的轮廓、高度、边界和密度分布构建建筑垃圾处理模型,并设置挖掘干扰权重以及结合密度进行适宜起始挖掘位置确认,可以制定定制化的作业策略,进而便于更好地规划清理路径,从而减少意外发生的可能性,提高作业安全性,同时不仅避免了对环境造成额外的干扰或损坏,还确保了挖掘机能够有效地清理垃圾,并且在另一层面,还提高了挖掘机在复杂环境中的适应性。
10、(3)本发明通过根据各推荐起始挖掘点位置之间的距离、筑垃圾堆的轮廓、高度、目标区域内的风速以及各推荐起始挖掘点的所属高度层进行挖掘干扰权重设置,有效弥补了当前对建筑垃圾堆稳定性考虑不足的欠缺,确保了施工现场评估效果的有效性,从而提高了建筑垃圾的清理效率,避免了挖掘机因起始挖掘位置选取不当而受到额外的压力和挑战,减少了挖掘机的磨损和损坏风险。
11、(4)本发明通过将建筑垃圾堆分别按照垂直方向和水平方向区域划分,统计垂直重合比和水平重合比,并结合风速、建筑垃圾堆的高度和建筑垃圾堆的重心偏距统计堆放稳定度,弥补了当前对建筑垃圾堆放高度、倾斜以及密度等关键参数关注度不高的欠缺,直观展示了建筑垃圾堆的堆叠结构,进而客观地评估了建筑垃圾堆的堆放稳定状态,并且提高了后续适宜起始挖掘位置确认的可靠性和合理性。
12、(5)本发明通过统计建筑垃圾挖掘难度趋向度,并结合建筑垃圾堆所处区域的地面平整度进行适宜斗挖掘力分析,弥补了当前进行远程挖掘力度等控制时对挖掘机远程控制稳定性考虑的不足,在确保建筑垃圾能够被挖掘的基础上还确保了挖掘机的稳定性,减少了挖掘机在处理建筑垃圾时出现倾倒、倾斜或滑动等情况的几率,并且还避免了挖掘机在作业过程中需要频繁调整姿态或停止作业,确保了建筑垃圾处理的连续性和效率,提高了挖掘机作业的生产能力。
13、(6)本发明通过进行通信测试,并结合各次通信测试时对应延迟时长、丢包率和吞吐量进行发送调整类型确认和调整挖掘遥控指令发送频率分析,充分考虑了现场通信环境,直观地展示了远程通信的控制状态,规避了当前对挖掘机远程控制时稳定性考虑不足的欠缺,降低了后续通信延迟对挖掘机作业的干扰,尽可能的减少了挖掘机在执行任务时出现偏差的几率,进而确保了挖掘机作业远程控制的精准度和准确性,同时也提高了挖掘机作业远程控制的可靠性。
技术特征:
1.一种基于5g网络的挖掘机远程遥控系统,其特征在于:该系统包括:
2.根据权利要求1所述的一种基于5g网络的挖掘机远程遥控系统,其特征在于:所述分析目标设备的适宜起始挖掘位置,包括:
3.根据权利要求2所述的一种基于5g网络的挖掘机远程遥控系统,其特征在于:所述设置各标注点的挖掘干扰权重,包括:
4.根据权利要求3所述的一种基于5g网络的挖掘机远程遥控系统,其特征在于:所述统计建筑垃圾堆的堆放稳定度,包括:
5.根据权利要求2所述的一种基于5g网络的挖掘机远程遥控系统,其特征在于:所述分析目标设备的适宜斗挖掘力,包括:
6.根据权利要求5所述的一种基于5g网络的挖掘机远程遥控系统,其特征在于:所述统计建筑垃圾挖掘难度趋向度,包括:
7.根据权利要求5所述的一种基于5g网络的挖掘机远程遥控系统,其特征在于:所述分析目标设备的适宜臂挖掘力,包括:
8.根据权利要求7所述的一种基于5g网络的挖掘机远程遥控系统,其特征在于:所述设置臂挖掘力补偿权重,包括:
9.根据权利要求1所述的一种基于5g网络的挖掘机远程遥控系统,其特征在于:所述进行挖掘遥控指令发送调整分析,包括:
10.根据权利要求1所述的一种基于5g网络的挖掘机远程遥控系统,其特征在于:所述调整判断规则的具体设置如下:
技术总结
本发明属于挖掘机控制管理技术领域,具体公开提供的一种基于5G网络的挖掘机远程遥控系统,该系统包括:现场环境采集模块、挖掘操作分析模块、通信状态测试模块、遥控发送分析模块、信息库和挖掘操控控制终端。本发明通过结合目标区域内的建筑垃圾图像和风速,确认适宜起始挖掘位置、适宜斗挖掘力和适宜臂挖掘力,并根据通信测试数据确认调整挖掘遥控指令发送频率,有效解决了当前对挖掘机远程控制把控度不足的问题,确保了建筑垃圾清理的作业效率和挖掘机远程控制的稳定性和可靠性,并且还提高了挖掘机清理作业的精准度和准确性,进而可以根据不同的情况实现灵活控制,增加挖掘机在不同环境下的适用性和灵活性。
技术研发人员:高琪蓥,刘海江,褚龙
受保护的技术使用者:海江科技集团有限公司
技术研发日:
技术公布日:2024/6/20
- 还没有人留言评论。精彩留言会获得点赞!