一种挖掘机的作业机构定位方法、装置及系统与流程
本发明涉及机械信息化,具体为一种挖掘机的作业机构定位方法、装置及系统。
背景技术:
1、挖掘机应用广泛,但使用门槛高,因此挖掘机末端点定位技术开始得到应用。末端点定位可以应用在挖掘机的自动作业、辅助作业等领域中。
2、目前,行业中相关定位方案有:
3、1、使用全站仪等测绘一起,对施工场地进行测算定位。再通过测绘获得的目标作业点来指导挖掘机作业。该方法效率较低,往往需要一组测绘员,再加上挖掘机驾驶员多人协同。
4、2、将定位设备安装在车身上,同时在挖掘机各杆臂上安装imu(惯性传感器或惯性测量单元简称)。该方案的缺点是需要使用更多的imu以及线缆,提升了成本。
5、3、使用拉线传感器、角度传感器等传感器来对关节间的相对位置进行测量。该方案的缺点是安装困难,且传感器易受零偏影响,影响使用寿命。
6、因此,挖掘机的末端点定位是行业研究的痛点和热点。
技术实现思路
1、本方案通过在作业机构上安装高精度gnss设备,测量出挖掘机在世界坐标系中的绝对位置,并通过安装imu,获得挖掘机各杆臂之间的相对位置,从而计算出挖掘机末端点在世界坐标系下的位置。
2、为了解决上述技术问题,本发明提供如下技术方案:一种挖掘机的作业机构定位方法、装置及系统。
3、一种挖掘机的作业机构定位装置,包括位姿传感器和gnss双天线,所述的位姿传感器安装于连杆组上,所述的gnss双天线安装于单杆臂上。
4、优选的,所述的位姿传感器为imu、三轴加速度计或角度传感器中的任意一种。
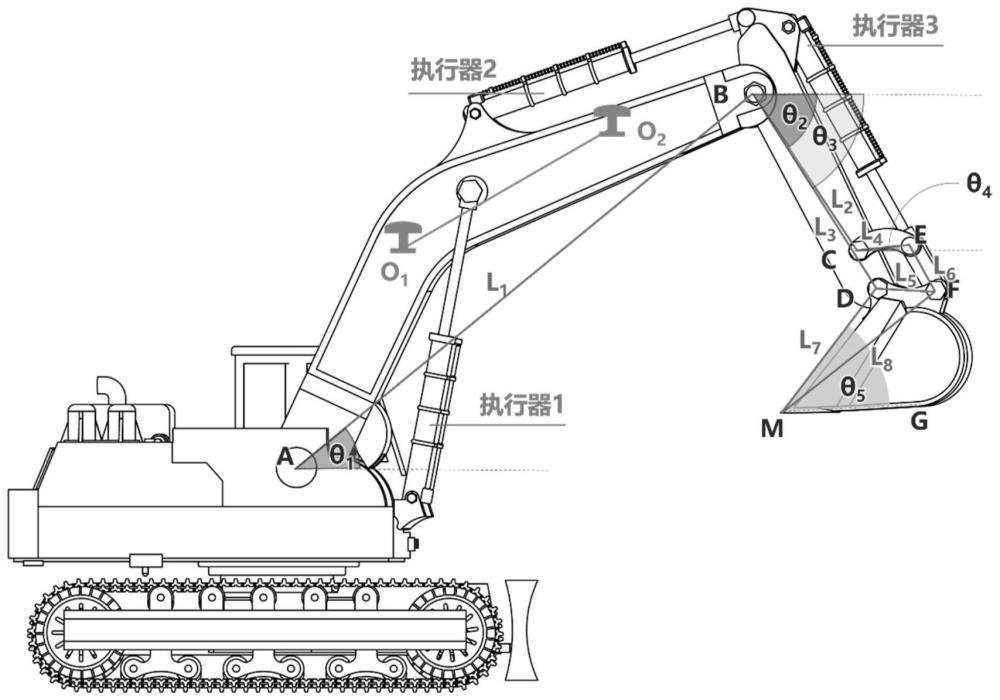
5、优选的,所述的连杆组包括与单杆臂连接的初动连杆、与初动连杆连接的铲斗推杆、与铲斗推杆连接的铲斗连杆。
6、优选的,所述的挖掘机为三杆臂挖掘机或四杆臂挖掘机中的任意一种。
7、优选的,所述的挖掘机为三杆臂挖掘机,所述的单杆臂包括依序连接的第一单杆臂和第二单杆臂,所述的第二单杆臂连接所述的连杆组;
8、所述的gnss双天线安装于所述的第二单杆臂,所述的位姿传感器安装于所述的初动连杆或者铲斗连杆上,或
9、所述的gnss双天线安装于所述的第一单杆臂,所述的位姿传感器安装于所述的第二单杆臂,所述的位姿传感器安装于所述的初动连杆或者铲斗连杆上。
10、优选的,所述的挖掘机为四杆臂挖掘机,所述的单杆臂包括依序连接的第一单杆臂、第二单杆臂和第三单杆臂,所述的第三单杆臂连接所述的连杆组;
11、所述的gnss双天线安装于所述的第三单杆臂,所述的位姿传感器安装于所述的初动连杆或者铲斗连杆上,或
12、所述的gnss双天线安装于所述的第二单杆臂,所述的位姿传感器安装于所述的第三单杆臂,所述的位姿传感器安装于所述的初动连杆或者铲斗连杆上,或
13、所述的gnss双天线安装于所述的第一单杆臂,所述的位姿传感器安装于所述的第二单杆臂,所述的位姿传感器安装于所述的第三单杆臂,所述的位姿传感器安装于所述的初动连杆或者铲斗连杆上。
14、一种挖掘机的作业机构定位方法,使用前述所述的一种挖掘机的作业机构定位装置,所述的位姿传感器为imu;
15、所述的位姿传感器安装于所述的初动连杆上对应的计算过程为:根据测量出的连杆组的所有连杆长度以及安装偏差,根据一端固定关节点的位置,通过连杆间的几何关系,推算出每个连杆关节点以及末端点的坐标;
16、所述的位姿传感器安装于所述的铲斗连杆上对应的计算过程为:根据测量的连杆组的所有连杆长度以及安装偏差,根据一端固定关节点的位置,通过连杆间的几何关系,推算出每个连杆关节点以及末端点的坐标;
17、所述的gnss双天线安装于所述的第二单杆臂对应的计算过程为:根据测量出的第二单杆臂两关节点各自到两个天线的距离,推算出前后两关节点的位置信息,以及天线连线与关节点连线的安装偏差;或
18、所述的gnss双天线安装于所述的第一单杆臂对应的计算过程为:根据测量出的第一单杆臂两关节点各自到两个天线的距离,推算出前后两关节点的位置信息,以及天线连线与关节点连线的安装偏差;
19、所述的位姿传感器安装于所述的第二单杆臂上对应的计算过程为:根据测量出的杆臂长度与imu与杆臂间的安装偏差,通过已知的杆臂一端点位置,通过几何学推算出杆臂另一端的位置。
20、优选的,所述的gnss双天线安装于所述的第二单杆臂对应的计算过程中,所述的第二单杆臂两关节点,或所述的gnss双天线安装于所述的第一单杆臂对应的计算过程中,所述的第一单杆臂两关节点,对应的具体求解可使用三圆相切联立方程组的方法求得。
21、一种挖掘机的作业机构定位系统,包括如前述任一所述的一种挖掘机的作业机构定位装置或运行如前述任一所述的一种挖掘机的作业机构定位方法。
22、与现有技术相比,本发明所达到的有益效果是:本方案能够在降低成本的同时降低安装的难度,并使传感器的误差得到降低。
23、本方案通过在作业机构上安装高精度gnss设备和imu,测量获得挖掘机在世界坐标系下的位置和各个杆臂的角度,最终推算出挖掘机铲斗的齿尖点的位置。本方案能够有效辅助施工单位确认对挖掘作业点的位置实现精准、高效的定位。同时,方案对传感器的选择、布置形式不同于已有方案。能够在提升系统使用寿命的同时,降低设备的物料成本和安装难度。
技术特征:
1.一种挖掘机的作业机构定位装置,其特征在于,包括位姿传感器和gnss双天线,所述的位姿传感器安装于连杆组上,所述的gnss双天线安装于单杆臂上。
2.根据权利要求1所述的一种挖掘机的作业机构定位装置,其特征在于,所述的位姿传感器为imu、三轴加速度计或角度传感器中的任意一种。
3.根据权利要求2所述的一种挖掘机的作业机构定位装置,其特征在于,所述的连杆组包括与单杆臂连接的初动连杆、与初动连杆连接的铲斗推杆、与铲斗推杆连接的铲斗连杆。
4.根据权利要求3所述的一种挖掘机的作业机构定位装置,其特征在于,所述的挖掘机为三杆臂挖掘机或四杆臂挖掘机中的任意一种。
5.根据权利要求4所述的一种挖掘机的作业机构定位装置,其特征在于,所述的挖掘机为三杆臂挖掘机,所述的单杆臂包括依序连接的第一单杆臂和第二单杆臂,所述的第二单杆臂连接所述的连杆组;
6.根据权利要求4所述的一种挖掘机的作业机构定位装置,其特征在于,所述的挖掘机为四杆臂挖掘机,所述的单杆臂包括依序连接的第一单杆臂、第二单杆臂和第三单杆臂,所述的第三单杆臂连接所述的连杆组;
7.一种挖掘机的作业机构定位方法,其特征在于,使用权利要求5所述的一种挖掘机的作业机构定位装置,所述的位姿传感器为imu;
8.根据权利要求7所述的一种挖掘机的作业机构定位方法,其特征在于,所述的gnss双天线安装于所述的第二单杆臂对应的计算过程中,所述的第二单杆臂两关节点,或所述的gnss双天线安装于所述的第一单杆臂对应的计算过程中,所述的第一单杆臂两关节点,对应的具体求解可使用三圆相切联立方程组的方法求得。
9.一种挖掘机的作业机构定位系统,其特征在于,包括如权利要求1~6任一所述的一种挖掘机的作业机构定位装置或运行如权利要求7~8任一所述的一种挖掘机的作业机构定位方法。
技术总结
本发明属于机械信息化技术,具体为一种挖掘机的作业机构定位方法、装置及系统。主要涉及挖掘机作业点的末端定位;是通过在挖掘机作业机构上安装GNSS定位设备,以及位姿传感器,通过几何学对各个杆臂的位置姿态进行计算的方案。能够使挖掘机挖掘点的位置得到精准测算,以提高作业精度。
技术研发人员:张春晖,李晓宇,具大源
受保护的技术使用者:上海联适导航技术股份有限公司
技术研发日:
技术公布日:2024/7/15
- 还没有人留言评论。精彩留言会获得点赞!