一种自锁式作业臂及作业设备的制作方法
发明涉及一种自锁式作业臂及作业设备,属于基础工程施工设备。
背景技术:
1、目前,打桩机是一种能够将桩基础捡起并将其打入地下的设备,发明人知晓的一种打桩机包括工程车、作业臂和打桩锤这三个主要部分。其中,作业臂的后端与工程车相连接,而作业臂的前端则是通过销轴与打桩锤的销孔进行连接,形成了一种硬连接结构。
2、当打桩机需要在深水区域(尤其是海上)进行作业时,通常的做法是将其安装在船上,然后船载着打桩机前往作业区域。到达后,打桩机的作业臂会带着打桩锤移动,将捡起的桩基础移至水中指定位置并开始打桩。在风力较小的情况下,船的晃动幅度很小,这种微小的晃动对打桩作业几乎没有影响,因此可以顺利完成捡桩、打桩等一系列作业流程。然而,当风力增大时,船的晃动幅度也会随之加大,进而导致工程车晃动。由于作业臂和打桩锤之间是通过销轴和销孔直接、牢固地连接在一起的,且打桩机的作业臂长度大多超过20米,打桩臂后端晃动会导致其前端晃动量更大。当桩基础的一部分已经打入泥土中时,其底部相对于地面是固定的,而上部则被打桩锤夹持。这时,打桩机的晃动很容易导致桩基础被折断,或者将桩基础的下沉孔晃大,使得桩基础无法固定,甚至有可能将整个打桩机拖入水中。
3、发明人知晓的另一种作业技术中采用了履带打桩机,是利用钢丝绳起吊桩锤的方式来打桩,这种方式虽然能够不受风力影响进行打桩作业,但是无法实现自主捡桩,需要额外的辅助捡桩机构,这不仅增加了拖船的吨位,还提高了施工成本。
4、需要说明的是,本背景技术部分中公开的以上信息仅用于理解本发明构思的背景技术,并且因此,它可以包含不构成现有技术的信息。
技术实现思路
1、本发明的目的在于提供一种新的技术方案以改善或解决如上所述的现有技术中存在的技术问题。
2、本发明提供的技术方案如下:一种自锁式作业臂,包括大臂、小臂和护臂,所述大臂与所述小臂活动连接,所述小臂与所述护臂活动连接,还包括绳索驱动器、拉绳、连接座和定位组件,所述绳索驱动器安装在所述护臂上,所述绳索驱动器用于驱动所述拉绳收紧或拉出;所述拉绳的一端与所述绳索驱动器连接,所述拉绳的另一端与所述连接座连接;所述连接座的下端设有用于连接外部作业工具的连接部;所述定位组件能够将所述连接座锁定在所述护臂上,防止所述连接座在拉绳收紧状态下发生移动。
3、本发明提供的技术方案,与现有技术相比,具有以下有益效果:当拉绳在绳索驱动器的作用下收紧时,通过所述定位组件能够实现与外部作业工具的硬连接,从而能够将桩基础直接捡起,实现捡桩作业,并将捡起的桩基础精确定位至预定位置进行作业;而当在水上作业风力较大时,可以通过所述绳索驱动器下放所述绳索,外部作业工具通过拉绳与所述作业臂实现柔性连接,这样作业臂或工程车晃动就不会影响外部作业工具的工作,从而避免了水上作业时风力对作业的影响。
4、在上述技术方案的基础上,本发明还可以做如下改进。
5、进一步地,所述连接座呈多面锥台形状。
6、进一步地,所述定位组件包括第一引导板和第二引导板,所述第一引导板和所述第二引导板分别倾斜设置在所述护臂的内侧壁上,所述第一引导板和所述第二引导板具有与所述连接座相适配的倾斜角度。
7、采用上述进一步方案的有益效果是,拉绳收紧时产生的巨大力量,如果连接座不能被可靠固定,可能会引发重物的晃动甚至掉落,造成严重的事故,所述定位组件与所述多面锥台形状的连接座配合,能够实现所述连接座的精准引导和定位,即不仅能够在所述拉绳收紧的过程中,确保连接座准确无误地进入预定位置,而且当所述拉绳收紧时,还能够将所述连接座限位固定在第一引导板和第二引导板之间。
8、进一步地,还包括锁销机构,所述连接座上设有销孔,所述销孔贯穿所述连接座及护臂,所述锁销机构包括销轴,所述销轴能够插入或移出所述销孔。
9、采用上述进一步方案的有益效果是,所述锁销机构能够进一步增强连接座与护臂连接的稳固性,当销轴插入销孔内,锁销机构将连接座稳固固定在护臂上,避免了在强力作用下连接座可能出现的位移或晃动,在一些需要高度稳定连接的工况下,锁销机构能够确保连接座不会因意外情况而松动,保障作业的安全进行;而当锁销机构对连接座解锁后,绳索驱动器下放绳索,又能通过拉绳与外部作业工具实现柔性连接。
10、进一步地,所述锁销机构还包括两个驱动缸、横杆和缸座,所述缸座固定在所述护臂上,两个所述驱动缸分别设置在所述护臂的两侧,两个所述驱动缸的缸体均与所述缸座连接,两个所述驱动缸的伸缩轴之间连接所述横杆,所述销轴安装在所述横杆上。
11、采用上述进一步方案的有益效果是,两个驱动缸分别设置在护臂的两侧,并通过横杆连接,使得驱动力能够均匀分布在销轴上,确保销轴的准确插入和移出,减少因单侧受力不均导致的卡顿或偏差。
12、进一步地,还包括张紧轮,所述张紧轮安装在所述护臂上,所述拉绳的另一端绕过所述张紧轮后与所述连接座连接。
13、采用上述进一步方案的有益效果是,所述张紧轮能够有效地引导拉绳的运动方向,避免拉绳在运动过程中出现混乱、缠绕或偏离预定轨道的情况;同时,张紧轮能够确保拉绳始终处于适当的张紧状态,提高拉绳传动的效率和稳定性。
14、进一步地,所述绳索驱动器为卷扬机或伸缩油缸。
15、采用上述进一步方案的有益效果是,当需要满足较长的绳索收放要求时,可以采用卷扬机,且卷扬机可以提供更精确的绳索收放控制;当采用伸缩油缸时,可以通过油缸驱动轴的伸缩动作实现拉绳的收放,所述伸缩油缸能够提供较大的驱动力。
16、进一步地,所述连接部为套管。
17、采用上述进一步方案的有益效果是,可以通过套管及销轴实现与外部作业部件的连接,方便拆装。
18、一种作业设备,包括工程车,还包括所述的自锁式作业臂,所述自锁式作业臂的大臂端与所述工程车传动连接。
19、进一步地,还包括外部作业工具,所述外部作业工具连接在所述作业设备的连接座下端的连接部上。
技术特征:
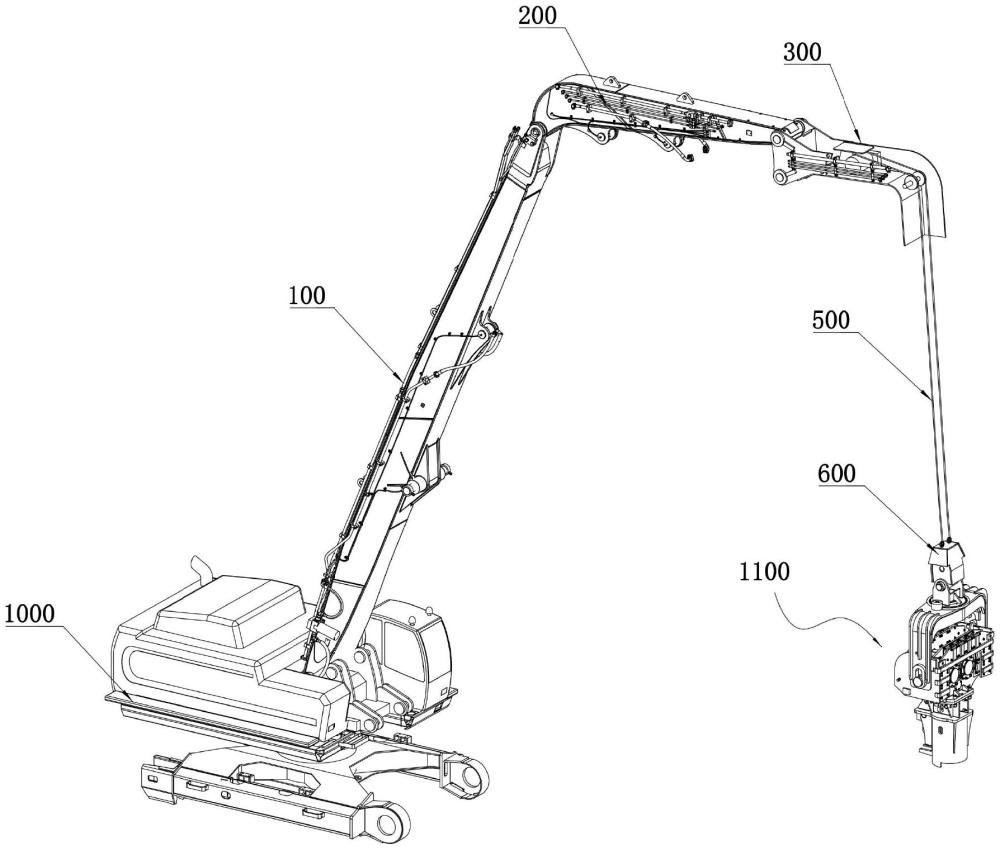
1.一种自锁式作业臂,包括大臂(100)、小臂(200)和护臂(300),所述大臂(100)与所述小臂(200)活动连接,所述小臂(200)与所述护臂(300)活动连接,其特征在于,还包括绳索驱动器(400)、拉绳(500)、连接座(600)和定位组件,所述绳索驱动器(400)安装在所述护臂(300)上,所述绳索驱动器(400)用于驱动所述拉绳(500)收紧或拉出;所述拉绳(500)的一端与所述绳索驱动器(400)连接,所述拉绳(500)的另一端与所述连接座(600)连接;所述连接座(600)的下端设有用于连接外部作业工具(1100)的连接部(610);所述定位组件能够将所述连接座(600)锁定在所述护臂(300)上,防止所述连接座(600)在拉绳(500)收紧状态下发生移动。
2.根据权利要求1所述的自锁式作业臂,其特征在于,所述连接座(600)呈多面锥台形状。
3.根据权利要求2所述的自锁式作业臂,其特征在于,所述定位组件包括第一引导板(710)和第二引导板(720),所述第一引导板(710)和所述第二引导板(720)分别倾斜设置在所述护臂(300)的内侧壁上,所述第一引导板(710)和所述第二引导板(720)具有与所述连接座(600)相适配的倾斜角度。
4.根据权利要求1所述的自锁式作业臂,其特征在于,还包括锁销机构(800),所述连接座(600)上设有销孔,所述销孔贯穿所述连接座(600)及护臂(300),所述锁销机构(800)包括销轴(810),所述销轴(810)能够插入或移出所述销孔。
5.根据权利要求4所述的自锁式作业臂,其特征在于,所述锁销机构(800)还包括两个驱动缸(820)、横杆(830)和缸座(840),所述缸座(840)固定在所述护臂(300)上,两个所述驱动缸(820)分别设置在所述护臂(300)的两侧,两个所述驱动缸(820)的缸体均与所述缸座(840)连接,两个所述驱动缸(820)的伸缩轴之间连接所述横杆(830),所述销轴(810)安装在所述横杆(830)上。
6.根据权利要求1~5任意一项所述的自锁式作业臂,其特征在于,还包括张紧轮(900),所述张紧轮(900)安装在所述护臂(300)上,所述拉绳(500)的另一端绕过所述张紧轮(900)后与所述连接座(600)连接。
7.根据权利要求6所述的自锁式作业臂,其特征在于,所述绳索驱动器(400)为卷扬机或伸缩油缸。
8.根据权利要求7所述的自锁式作业臂,其特征在于,所述连接部(610)为套管。
9.一种作业设备,包括工程车(1000),其特征在于,还包括如权利要求1~8任意一项所述的自锁式作业臂,所述自锁式作业臂的大臂(100)端与所述工程车(1000)传动连接。
10.根据权利要求9所述的作业设备,其特征在于,还包括外部作业工具(1100),所述外部作业工具(1100)连接在所述自锁式作业臂的连接座(600)下端的连接部(610)上。
技术总结
本发明属于机械设备技术领域,涉及一种自锁式作业臂及作业设备,所述自锁式作业臂包括大臂、小臂和护臂,所述大臂与所述小臂活动连接,所述小臂与所述护臂活动连接,还包括绳索驱动器、拉绳、连接座和定位组件;所述作业设备包括工程车,还包括所述的自锁式作业臂,所述自锁式作业臂的大臂端与所述工程车传动连接。当拉绳在绳索驱动器的作用下收紧时,通过所述定位组件能够实现与外部作业工具的硬连接,实现捡桩作业;而当在水上作业风力较大时,可以通过所述绳索驱动器下放所述绳索,外部作业工具通过拉绳与所述作业臂实现柔性连接,这样作业臂或工程车晃动就不会影响外部作业工具的工作,从而避免了水上作业时风力对作业的影响。
技术研发人员:刘登华,马传达
受保护的技术使用者:烟台巨翔建筑机械有限公司
技术研发日:
技术公布日:2024/11/11
- 还没有人留言评论。精彩留言会获得点赞!