一种水下清淤设备的制作方法
本发明涉及水下清淤作业,具体涉及一种水下清淤设备。
背景技术:
1、目前我国海上养殖主要集中在近海浅水海域,养殖方式粗放、养殖布局不合理、养殖密度过大、养殖品质不高,有限的近岸海域资源已经难以负担水产品总量持续增长的压力。我国拥有广阔的深远海养殖海域资源,国家鼓励发展深远海养殖,建立海上牧场。
2、基于现代化大规模养殖方式的海洋牧场新理念,需要建立采用工业化生产的大规模深远海养殖新模式。其中,需要建立污损生物管理服务系统以控制深远海养殖对生态的影响,进而实现绿色养殖。
3、大规模深海养殖会在养殖区的海底集聚大量的残留鱼饵和养殖鱼排泄物,这会导致严重的海水富营养化。因此需要采用妥善的办法处理这些残留鱼饵和养殖鱼排泄物,清除是一种有效的办法。
4、因此,需要开发一种可以高效、绿色和安全清除这些残留鱼饵和养殖鱼排泄物的水下清淤机器人,实现自动化作业。
技术实现思路
1、鉴于以上所述现有技术的缺点,本发明要解决的技术问题在于提供一种水下清淤设备,能够实现水底集聚物的高效且自动化清淤作业。
2、为实现上述目的,本发明提供一种水下清淤设备,包括水下清淤机器人和远程操控系统,所述水下清淤机器人包括支撑基座、行走装置、清淤装置、输出管路装置、动力装置和机器人控制系统,所述清淤装置、输出管路装置、动力装置和机器人控制系统都安装于支撑基座,所述行走装置安装于支撑基座,用于带动支撑基座移动,所述清淤装置包括清淤头、抽吸管路和清淤泵组,所述清淤头包括用于破碎水底集聚物的破碎刀具、以及用于吸取破碎后的水底集聚物的清淤吸头,所述抽吸管路连接清淤吸头和清淤泵组的泵入口;所述输出管路装置包括清淤输送管道,所述清淤输送管道的入口端与清淤泵组的泵出口相连,所述动力装置分别与行走装置、破碎刀具和清淤泵组都相连,能够提供动力驱动行走装置、破碎刀具和清淤泵组工作;所述机器人控制系统与动力装置控制相连;所述远程操控系统与机器人控制系统通讯相连。
3、进一步地,所述清淤装置还包括连接支撑基座和清淤头的调整机构,所述调整机构能够调整清淤头的上下位置。
4、进一步地,所述调整机构包括调节摆臂和调节动力缸,所述调节摆臂一端与支撑基座相铰接、另一端与清淤头连接,所述调节动力缸铰接于支撑基座,且其活塞杆与清淤头或调节摆臂相铰接;所述调节动力缸的活塞杆伸缩运动时带动调节摆臂上下转动;所述动力装置向调节动力缸提供动力驱动调节动力缸的活塞杆运动。
5、进一步地,所述破碎刀具包括螺旋刀片、以及用于驱动螺旋刀片转动的转动驱动组件。
6、进一步地,所述水下清淤机器人的行走装置包括设置在支撑基座相对两侧的履带行走机构。
7、进一步地,所述水下清淤机器人行走装置能够带动支撑基座在海底面上进行转向,所述输出管路装置还包括旋转接头,所述清淤输送管道的入口端通过旋转接头与清淤泵组的泵出口相连,所述旋转接头的旋转轴线沿着水下清淤机器人的高度方向。
8、进一步地,所述输出管路装置还包括管路支持机构,所述管路支持机构可转动安装于支撑基座,且其旋转轴线与旋转接头的旋转轴线共线,所述清淤输送管道靠近入口端的一段位于管路支持机构中,所述管路支持机构用于维持位于其中的清淤输送管道的形状。
9、进一步地,还包括设置在水上的集聚物存储装置,所述水下清淤机器人的清淤输送管道的出口端与集聚物存储装置相连。
10、进一步地,所述水下清淤机器人还包括配重装置,所述配重装置包括多个可拆卸式安装的配重块,且配重块在水下清淤机器人中的位置可调。
11、进一步地,所述水下清淤机器人还包括摄像照明装置,所述摄像照明装置包括前照明及摄像机构、后照明及摄像机构和顶部照明及摄像机构,所述前照明及摄像机构、后照明及摄像机构和顶部照明及摄像机构都包括灯具和摄像头,且摄像头都与机器人控制系统通讯相连,所述前照明及摄像机构能够对支撑基座前方进行照明和拍摄,所述后照明及摄像机构能够对支撑基座后方进行照明和拍摄,所述顶部照明及摄像机构能够对输出管路装置进行照明和拍摄。
12、如上所述,本发明涉及的水下清淤设备,具有以下有益效果:
13、1、能够在水上通过远程操控系统控制水下清淤机器人在水下行走至指定区域并进行清淤动作,水下清淤机器人通过对各种水底集聚物先进行破碎,然后吸入、加压输送,并排至水上指定位置,能够高效地的实现清淤工作,并且整个清淤工作能够在水底实现自动化作业,只需进行远程操控,尤其能够用于清除大规模深海养殖区海底所集聚的残留鱼饵和养殖鱼排泄物。
14、2、输出管路装置通过设置旋转接头和管路支持机构,管路支持机构能够保护清淤输送管道不受挤压变形,并且在水下清淤机器人进行转向作业时确保清淤输送管道可以保持基本不动,方便对各个方向进行清淤作业,使用方便灵活,
15、3、配置了照明、摄像功能,具备水下作业环境的感知能力;清淤过程中水下清淤机器人的各种状态参数,均可以在远程操控系统(水面之上)中监测、统计与分析,利于清淤过程的监控以及清淤作业的施工计划制定;水下清淤机器人可以实现小时连续作业,清淤过程高效、绿色与安全,并且可以预设水下作业区域,并智能规划作业路径,自动完成清淤作业。
技术特征:
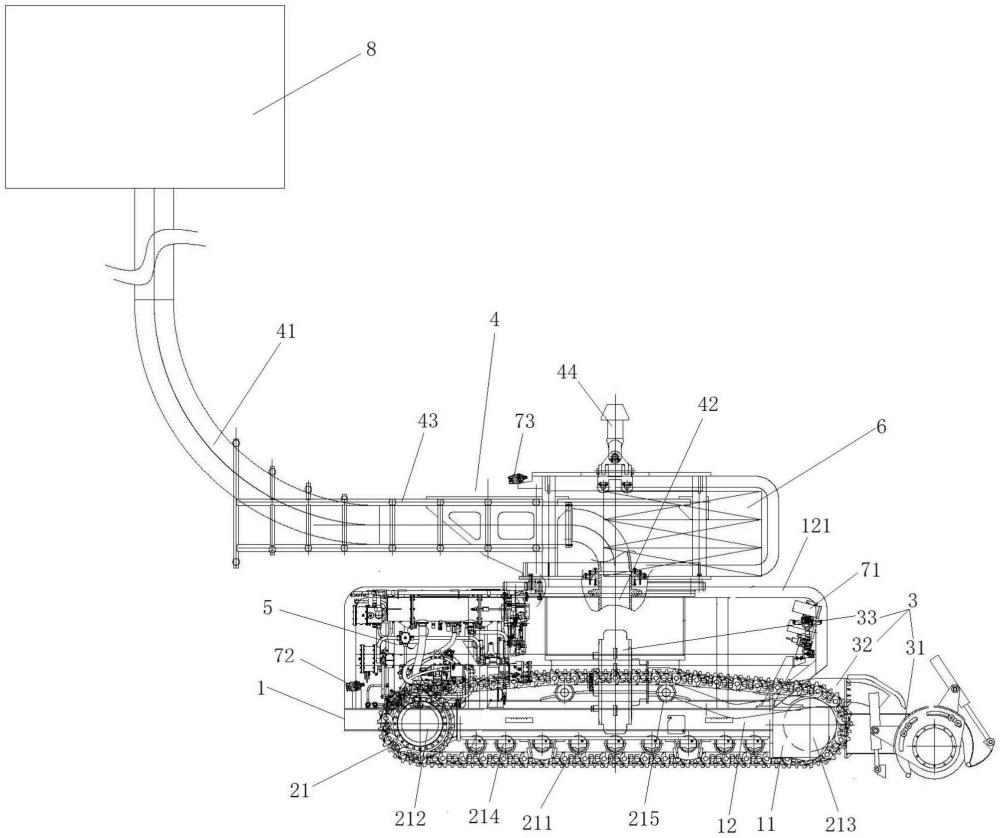
1.一种水下清淤设备,其特征在于:包括水下清淤机器人和远程操控系统(9),所述水下清淤机器人包括支撑基座(1)、行走装置(2)、清淤装置(3)、输出管路装置(4)、动力装置(5)和机器人控制系统,所述清淤装置(3)、输出管路装置(4)、动力装置(5)和机器人控制系统都安装于支撑基座(1),所述行走装置(2)安装于支撑基座(1),用于带动支撑基座(1)移动,所述清淤装置(3)包括清淤头(31)、抽吸管路(32)和清淤泵组(33),所述清淤头(31)包括用于破碎水底集聚物的破碎刀具(312)、以及用于吸取破碎后的水底集聚物的清淤吸头,所述抽吸管路(32)连接清淤吸头和清淤泵组(33)的泵入口;所述输出管路装置(4)包括清淤输送管道(41),所述清淤输送管道(41)的入口端与清淤泵组(33)的泵出口相连,所述动力装置(5)分别与行走装置(2)、破碎刀具(312)和清淤泵组(33)都相连,能够提供动力驱动行走装置(2)、破碎刀具(312)和清淤泵组(33)工作;所述机器人控制系统与动力装置(5)控制相连;所述远程操控系统(9)与机器人控制系统通讯相连。
2.根据权利要求1所述的水下清淤设备,其特征在于:所述清淤装置(3)还包括连接支撑基座(1)和清淤头(31)的调整机构(34),所述调整机构(34)能够调整清淤头(31)的上下位置。
3.根据权利要求2所述的水下清淤设备,其特征在于:所述调整机构(34)包括调节摆臂(341)和调节动力缸(342),所述调节摆臂(341)一端与支撑基座(1)相铰接、另一端与清淤头(31)连接,所述调节动力缸(342)铰接于支撑基座(1),且其活塞杆与清淤头(31)或调节摆臂(341)相铰接;所述调节动力缸(342)的活塞杆伸缩运动时带动调节摆臂(341)上下转动;所述动力装置(5)向调节动力缸(342)提供动力驱动调节动力缸(342)的活塞杆运动。
4.根据权利要求1所述的水下清淤设备,其特征在于:所述破碎刀具(312)包括螺旋刀片(3121)、以及用于驱动螺旋刀片(3121)转动的转动驱动组件(3122)。
5.根据权利要求1所述的水下清淤设备,其特征在于:所述水下清淤机器人的行走装置(2)包括设置在支撑基座(1)相对两侧的履带行走机构(21)。
6.根据权利要求1或3所述的水下清淤设备,其特征在于:所述水下清淤机器人行走装置(2)能够带动支撑基座(1)在海底面上进行转向,所述输出管路装置(4)还包括旋转接头(42),所述清淤输送管道(41)的入口端通过旋转接头(42)与清淤泵组(33)的泵出口相连,所述旋转接头(42)的旋转轴线沿着水下清淤机器人的高度方向。
7.根据权利要求1所述的水下清淤设备,其特征在于:所述输出管路装置(4)还包括管路支持机构(43),所述管路支持机构(43)可转动安装于支撑基座(1),且其旋转轴线与旋转接头(42)的旋转轴线共线,所述清淤输送管道(41)靠近入口端的一段位于管路支持机构(43)中,所述管路支持机构(43)用于维持位于其中的清淤输送管道(41)的形状。
8.根据权利要求1所述的水下清淤设备,其特征在于:还包括设置在水上的集聚物存储装置(8),所述水下清淤机器人的清淤输送管道(41)的出口端与集聚物存储装置(8)相连。
9.根据权利要求1所述的水下清淤设备,其特征在于:所述水下清淤机器人还包括配重装置(6),所述配重装置(6)包括多个可拆卸式安装的配重块,且配重块在水下清淤机器人中的位置可调。
10.根据权利要求1所述的水下清淤设备,其特征在于:所述水下清淤机器人还包括摄像照明装置,所述摄像照明装置包括前照明及摄像机构(71)、后照明及摄像机构(72)和顶部照明及摄像机构(73),所述前照明及摄像机构(71)、后照明及摄像机构(72)和顶部照明及摄像机构(73)都包括灯具和摄像头,且摄像头都与机器人控制系统通讯相连,所述前照明及摄像机构(71)能够对支撑基座(1)前方进行照明和拍摄,所述后照明及摄像机构(72)能够对支撑基座(1)后方进行照明和拍摄,所述顶部照明及摄像机构(73)能够对输出管路装置(4)进行照明和拍摄。
技术总结
本发明涉及一种水下清淤设备,包括水下清淤机器人和远程操控系统,所述水下清淤机器人包括支撑基座、行走装置、清淤装置、输出管路装置、动力装置和机器人控制系统,所述清淤装置、输出管路装置、动力装置和机器人控制系统都安装于支撑基座,所述行走装置安装于支撑基座,所述清淤装置包括清淤头、抽吸管路和清淤泵组,所述清淤头包括破碎刀具和清淤吸头,所述抽吸管路连接清淤吸头和清淤泵组的泵入口;所述输出管路装置包括清淤输送管道,所述清淤输送管道的入口端与清淤泵组的泵出口相连,所述动力装置分别与行走装置、破碎刀具和清淤泵组都相连;所述机器人控制系统与动力装置控制相连;所述远程操控系统与机器人控制系统通讯相连。
技术研发人员:张园,尹刚,顾峰,武宇
受保护的技术使用者:中国交通建设股份有限公司南方分公司
技术研发日:
技术公布日:2024/12/19
- 还没有人留言评论。精彩留言会获得点赞!