一种用于钢护筒打设的智能安全监测装置的制作方法
本技术涉及桩基施工,具体为一种用于钢护筒打设的智能安全监测装置。
背景技术:
1、钢护筒是桩基使用时使用的保护设备,但现有的钢护筒打设仍然存在不足之处,具体为:现有的钢护筒打设时,无法实时监测钢护筒的倾斜程度。
2、因此,需要一种用于钢护筒打设的智能安全监测装置来解决上述背景技术中提出的问题。
技术实现思路
1、本实用新型的目的在于提供一种用于钢护筒打设的智能安全监测装置,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
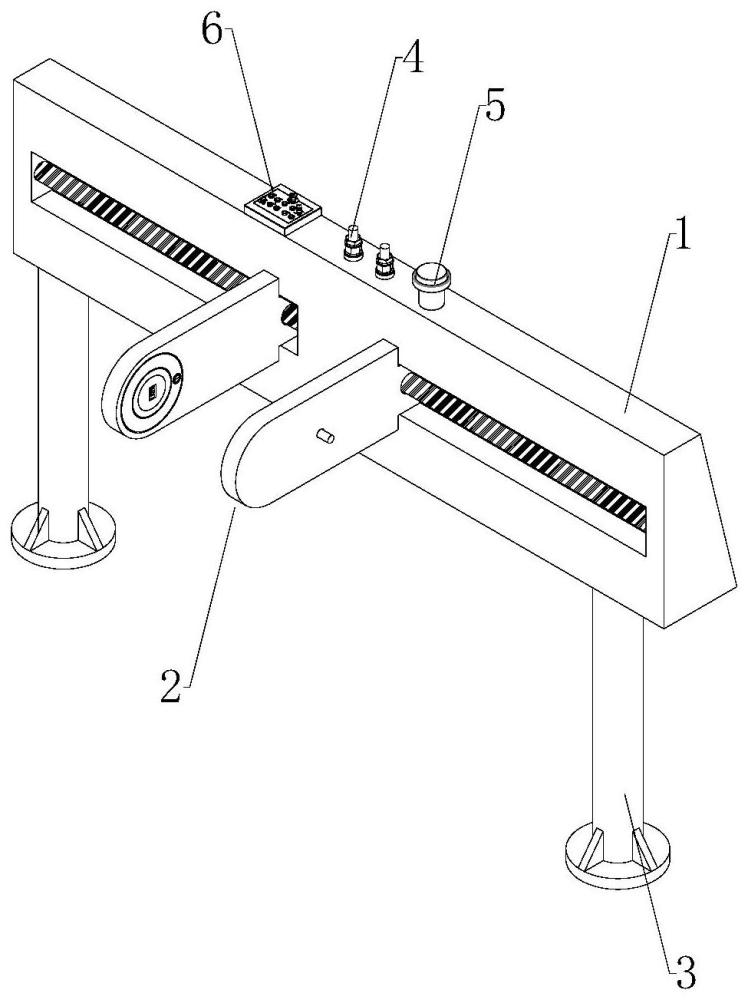
3、一种用于钢护筒打设的智能安全监测装置,包括固定架,所述固定架的内部设置有监测机构,所述固定架的底部安装有支撑架,所述固定架的顶部中心处安装有接线柱,所述固定架的顶部且在靠近接线柱位置处固定连接有指示灯,所述固定架的外壁且在远离接线柱位置处安装有控制器;
4、所述监测机构包括滑动连接在固定架外壁的监测板,所述监测板的内部且在远离固定架位置处固定连接有激光发射器,所述监测板的内部且在靠近激光发射器位置处转动连接有转动板,所述转动板的外壁固定连接有激光接收器,所述转动板外壁固定连接有传动齿轮,所述传动齿轮的外壁啮合连接有驱动齿轮,所述驱动齿轮的内部中心处固定连接有调节杆,所述监测板的内部且在固定架内固定连接有滑动螺母,所述滑动螺母的内部中心处螺纹连接有驱动螺杆,所述驱动螺杆的外壁且在固定架内安装有伺服电机。
5、作为本实用新型优选的方案,所述固定架和支撑架均由铝合金制成,所述指示灯、接线柱与控制器的连接方式均为电性连接,所述固定架为梯形结构设计。
6、作为本实用新型优选的方案,所述监测板、转动板以及调节杆均由铝合金制成,所述监测板、激光发射器、驱动螺杆以及伺服电机均设置有两组。
7、作为本实用新型优选的方案,所述转动板为环形结构设计,所述调节杆贯穿并延伸至转动板外壁,所述伺服电机与固定架的连接方式为固定连接。
8、作为本实用新型优选的方案,所述监测板为凸字形结构设计,所述调节杆与监测板、驱动螺杆与固定架的连接方式均为转动连接。
9、作为本实用新型优选的方案,所述驱动螺杆贯穿并延伸至监测板外,所述激光发射器、激光接收器以及伺服电机与控制器的连接方式均为电性连接。
10、与现有技术相比,本实用新型的有益效果是:
11、1、本实用新型中,通过设计一种用于钢护筒打设的智能安全监测装置,利用该装置中的监测机构来监测钢护筒打设,将支撑架和固定架放置在桩基坑附近,控制器启动伺服电机,伺服电机会带动驱动螺杆旋转,旋转的驱动螺杆会通过滑动螺母带动监测板向外移动,监测板移动到桩基坑的两侧,将钢护筒竖直放入桩基坑中,控制器启动激光发射器,激光发射器发出的激光在钢护筒外壁发生反射,转动调节杆,调节杆会通过驱动齿轮带动传动齿轮旋转,传动齿轮通过转动板带动激光接收器转动,使激光接收器对准反射回来的激光,激光接收器接收到反射回来的激光后,控制器开启指示灯,开始打设钢护筒,当钢护筒发生倾斜后,钢护筒反射的激光角度发生变化,激光接收器无法接收到反射回来的激光,控制器关闭指示灯,提醒施工人员钢护筒发生倾斜,可以在打设时对钢护筒进行监测,解决了现有的钢护筒打设时,无法实时监测钢护筒的倾斜程度的问题。
技术特征:
1.一种用于钢护筒打设的智能安全监测装置,包括固定架(1),其特征在于:所述固定架(1)的内部设置有监测机构(2),所述固定架(1)的底部安装有支撑架(3),所述固定架(1)的顶部中心处安装有接线柱(4),所述固定架(1)的顶部且在靠近接线柱(4)位置处固定连接有指示灯(5),所述固定架(1)的外壁且在远离接线柱(4)位置处安装有控制器(6);
2.根据权利要求1所述的一种用于钢护筒打设的智能安全监测装置,其特征在于:所述固定架(1)和支撑架(3)均由铝合金制成,所述指示灯(5)、接线柱(4)与控制器(6)的连接方式均为电性连接,所述固定架(1)为梯形结构设计。
3.根据权利要求1所述的一种用于钢护筒打设的智能安全监测装置,其特征在于:所述监测板(201)、转动板(203)以及调节杆(207)均由铝合金制成,所述监测板(201)、激光发射器(202)、驱动螺杆(209)以及伺服电机(210)均设置有两组。
4.根据权利要求1所述的一种用于钢护筒打设的智能安全监测装置,其特征在于:所述转动板(203)为环形结构设计,所述调节杆(207)贯穿并延伸至转动板(203)外壁,所述伺服电机(210)与固定架(1)的连接方式为固定连接。
5.根据权利要求1所述的一种用于钢护筒打设的智能安全监测装置,其特征在于:所述监测板(201)为凸字形结构设计,所述调节杆(207)与监测板(201)、驱动螺杆(209)与固定架(1)的连接方式均为转动连接。
6.根据权利要求1所述的一种用于钢护筒打设的智能安全监测装置,其特征在于:所述驱动螺杆(209)贯穿并延伸至监测板(201)外,所述激光发射器(202)、激光接收器(204)以及伺服电机(210)与控制器(6)的连接方式均为电性连接。
技术总结
本技术涉及桩基施工技术领域,尤其为一种用于钢护筒打设的智能安全监测装置,包括固定架,所述固定架的内部设置有监测机构,所述固定架的底部安装有支撑架,所述固定架的顶部中心处安装有接线柱,所述固定架的顶部且在靠近接线柱位置处固定连接有指示灯,所述固定架的外壁且在远离接线柱位置处安装有控制器;所述监测机构包括滑动连接在固定架外壁的监测板,所述监测板的内部且在远离固定架位置处固定连接有激光发射器,所述监测板的内部且在靠近激光发射器位置处转动连接有转动板,通过设计一种用于钢护筒打设的智能安全监测装置,利用监测机构来监测钢护筒打设,解决了现有的钢护筒打设时,无法实时监测钢护筒的倾斜程度的问题。
技术研发人员:田伟,宋超,李文良,李良,张晖,徐永明,张阳,张立陆
受保护的技术使用者:中铁建大桥工程局集团第一工程有限公司
技术研发日:20240221
技术公布日:2024/10/28
- 还没有人留言评论。精彩留言会获得点赞!