一种用于海上水下桥墩清洗机器人及使用方法
本发明涉及清洗设备,特别涉及一种用于海上水下桥墩清洗机器人及使用方法。
背景技术:
1、桥梁在完成建造之后,桥墩会长期浸泡在水中,导致其表面会附着上藤壶藻类等海生物,而加速桥体的腐蚀,降低桥梁的使用寿命;此外,对桥墩的检测与修复也需要进行表面附着物的清洗处理。为了解决上述问题,公开号为cn101550677和cn206015588u的专利中分别公开了几种水下桥墩墩壁清洗方法及装置,但是由于结构复杂,价格昂贵,对于清理桥墩的成本太高。
技术实现思路
1、针对现有技术的不足和缺陷,提供一种用于海上水下桥墩清洗机器人及使用方法,结构简单,使用方便,造价便宜。
2、为实现上述目的,本发明提供以下技术方案。
3、一种用于海上水下桥墩清洗机器人,包括套设于桥墩外周的机架以及设置于所述机架上的爬行机构和清洗机构,所述爬行机构包括第一爬行组件和第二爬行组件,第一爬行组件和第二爬行组件分别包括至少两个爬行单元,每一爬行单元包括分别包括固定板、夹紧块、升降驱动件和夹紧驱动件,所述升降驱动件包括升降本体和设置于升降本体上的升降驱动端,所述升降驱动端穿过升降本体,并从升降本体的上端形成上驱动端以及从升降本体的下端形成下驱动端,上驱动端与机架的上侧连接,下驱动端与机架的下侧连接,所述固定板上设置于所述升降本体上,所述夹紧驱动件包括设置于所述固定板上的夹紧本体和设置于夹紧本体上的夹紧驱动端,所述夹紧驱动端朝机架的中心处设置,所述夹紧块安装于所述夹紧驱动端上,每组爬行组件中的两个爬行单元相对设置,爬行时,两个爬行组件交替工作,实现机架的升降,所述清洗机构包括用于进行喷水的喷头和带动所述喷头进行转动的驱动机构,所述驱动机构安装于所述机架上。
4、本发明的有益效果为:本发明的清洗机器人,使用时,先将机架套设于桥墩的外周,同时通过爬行机构中的夹紧驱动件带动夹紧块与桥墩的外周相抵,从而将机架进行固定,用高压泵提供高压水,水流通过高压水管及高压射水从喷头喷出,对桥墩的外周进行清洗,同时通过驱动机构带动喷头旋转,使得桥墩的四周都能得到清洗,再通过升降驱动件的动作,带动机架整体上升或下降,从而使得喷头能够对整个桥墩进行清洗。
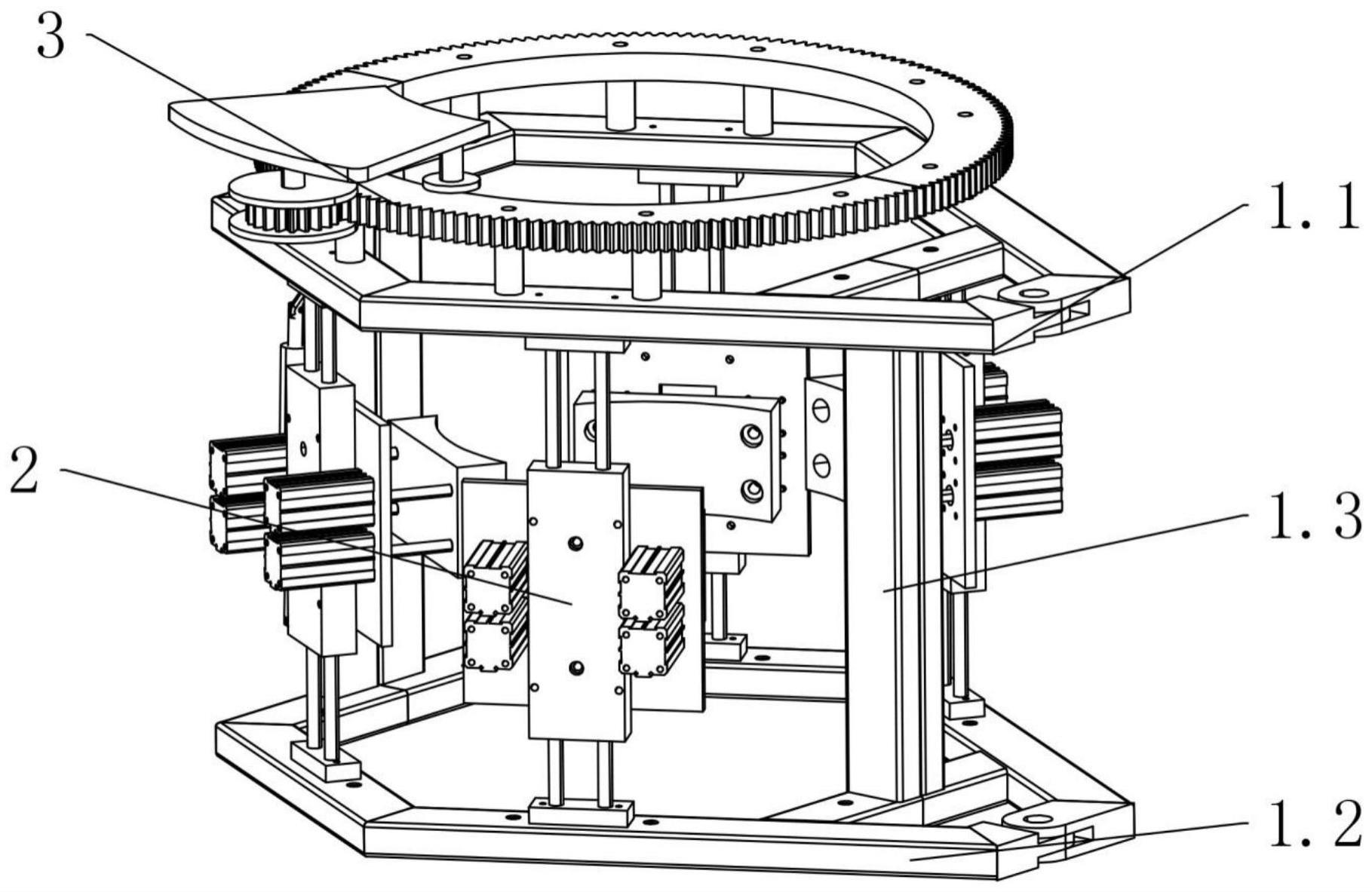
5、作为本发明的一种改进,所述驱动机构包括固定设置于机架上的定齿轮和与所述定齿轮配合的旋转组件,所述旋转组件包括安装板、动齿轮,所述动齿轮与所述定齿轮相啮合,所述安装板固定设置于所述动齿轮上,并且所述喷头设置于所述安装板上,所述清洗机构还包括驱动源,所述驱动源与所述动齿轮传动连接,以带动所述动齿轮绕所述定齿轮进行转动。
6、作为本发明的一种改进,所述旋转组件还包括与所述安装板连接的支撑杆、固定设置于支撑杆上的上支撑板和下支撑板,所述上支撑板和下支撑板之间形成有支撑空间,所述动齿轮转动设置于所述支撑杆上,并位于支撑空间内,且所述动齿轮与所述定齿轮啮合时,所述定齿轮部分伸入所述支撑空间内。
7、作为本发明的一种改进,所述升降驱动件为双轴气缸或双轴液压缸,所述夹紧驱动件为气缸或液压缸。
8、作为本发明的一种改进,每一所述爬行单元中至少包括两个夹紧驱动件,两个夹紧驱动件连接于同一夹紧块,两个夹紧驱动件分别设置于升降本体的两侧。
9、作为本发明的一种改进,所述机架包括呈上下排布的上框架和下框架以及将上框架和下框架进行连接的连接杆,所述升降驱动端的上端与上框架固定连接,所述升降驱动端的下端与下框架固定连接。
10、作为本发明的一种改进,所述上框架包括第一上架体和第二上架体,所述第一上架体的首端与所述第二上架体的首端铰接,所述第一上架体的末端与第二上架体的末端通过紧固件固定连接,所述下框架包括第一下架体和第二下架体,所述第一下架体的首端与所述第二下架体的首端铰接,所述第一下架体的末端与第二下架体的末端通过紧固件固定连接。
11、作为本发明的一种改进,所述连接杆至少具有两个,其中一个连接杆的上端连接于第一上架体的首端处,连接杆的下端连接于第一下架体的首端处,另一个连接杆的上端连接于第二上架体的首端处,连接杆的下端连接于第二下架体的首端处,两个连接杆之间通过紧固件进行连接。
12、作为本发明的一种改进,一种基于用于海上水下桥墩清洗机器人的使用方法,包括以下步骤:
13、s1.夹紧,将机架套设于桥墩外周,并通过爬行机构中所有的夹紧驱动端推动夹紧块移动,使得夹紧块与桥墩外周相抵,从而将机架进行固定;
14、s2.清洗,通过喷头出水,对桥墩进行清洗,同时通过驱动机构带动喷头进行圆周转动,使得喷头能够对桥墩四周进行清洗;
15、s3.上升,
16、s31.通过第一爬行组件中的夹紧驱动件将夹紧块与桥墩夹紧,第二爬行组件中的夹紧驱动件将夹紧块与桥墩分开,
17、s32.第二爬行组件中升降驱动件的升降本体相对于升降驱动端上升,并带动相应的夹紧驱动件以及夹紧块上升,
18、s33.第二爬行组件中夹紧驱动件将夹紧块与桥墩夹紧,第一爬行组件中的夹紧驱动件将夹紧块与桥墩分开,
19、s34.第二爬行组件中的升降驱动件的升降驱动端相对于升降本体上升,同时带动机架上升,从而带动机架上的喷头、第一爬行组件上升;
20、s35.第一爬行组件中升降驱动件的升降本体相对于升降驱动端上升,并带动相应的夹紧驱动件以及夹紧块上升,
21、s36,循环上述步骤s31-s35,实现爬行上升,
22、s4.下降,
23、s41.通过第一爬行组件中的夹紧驱动件将夹紧块与桥墩夹紧,第二爬行组件中的夹紧驱动件将夹紧块与桥墩分开,
24、s42.第二爬行组件中的升降驱动件的升降本体下降,并带动相应的夹紧驱动件以及夹紧块下降,
25、s43.第二爬行组件中的夹紧驱动件将夹紧块与桥墩夹紧,第一爬行组件中的夹紧驱动件将夹紧块与桥墩分开,
26、s44.第二爬行组件中的升降驱动件的升降驱动端相对于升降本体下降,同时带动机架下降,从而带动机架上的喷头、第一爬行组件下降,
27、s45.第一爬行组件中升降驱动件的升降本体相对于升降驱动端下降,并带动相应的夹紧驱动件以及夹紧块下降,
28、s46,循环上述步骤s41-s45,实现爬行下降。
技术特征:
1.一种用于海上水下桥墩清洗机器人,包括套设于桥墩外周的机架以及设置于所述机架上的爬行机构和清洗机构,其特征在于:所述爬行机构包括第一爬行组件和第二爬行组件,第一爬行组件和第二爬行组件分别包括至少两个爬行单元,每一爬行单元包括分别包括固定板、夹紧块、升降驱动件和夹紧驱动件,所述升降驱动件包括升降本体和设置于升降本体上的升降驱动端,所述升降驱动端的上端与机架的上侧连接,升降驱动端的下端与机架的下侧连接,所述固定板上设置于所述升降本体上,所述夹紧驱动件包括设置于所述固定板上的夹紧本体和设置于夹紧本体上的夹紧驱动端,所述夹紧驱动端朝机架的中心处设置,所述夹紧块安装于所述夹紧驱动端上,每组爬行组件中的两个爬行单元相对设置,爬行时,两个爬行组件交替工作,实现机架的升降,所述清洗机构包括用于进行喷水的喷头和带动所述喷头进行转动的驱动机构,所述驱动机构安装于所述机架上,并随着机架同步进行动作。
2.根据权利要求1所述的一种用于海上水下桥墩清洗机器人,其特征在于:所述驱动机构包括固定设置于机架上的定齿轮和与所述定齿轮配合的旋转组件,所述旋转组件包括安装板、动齿轮,所述动齿轮与所述定齿轮相啮合,所述安装板固定设置于所述动齿轮上,并且所述喷头设置于所述安装板上,所述清洗机构还包括驱动源,所述驱动源与所述动齿轮传动连接,以带动所述动齿轮绕所述定齿轮进行转动。
3.根据权利要求2所述的一种用于海上水下桥墩清洗机器人,其特征在于:所述旋转组件还包括与所述安装板连接的支撑杆、固定设置于支撑杆上的上支撑板和下支撑板,所述上支撑板和下支撑板之间形成有支撑空间,所述动齿轮转动设置于所述支撑杆上,并位于支撑空间内,且所述动齿轮与所述定齿轮啮合时,所述定齿轮部分伸入所述支撑空间内。
4.根据权利要求1所述的一种用于海上水下桥墩清洗机器人,其特征在于:所述升降驱动件为双轴气缸或双轴液压缸,所述夹紧驱动件为气缸或液压缸。
5.根据权利要求1所述的一种用于海上水下桥墩清洗机器人,其特征在于:每一所述爬行单元中至少包括两个夹紧驱动件,两个夹紧驱动件连接于同一夹紧块,两个夹紧驱动件分别设置于升降本体的两侧。
6.根据权利要求1所述的一种用于海上水下桥墩清洗机器人,其特征在于:所述机架包括呈上下排布的上框架和下框架以及将上框架和下框架进行连接的连接杆,所述升降驱动端的上端与上框架固定连接,所述升降驱动端的下端与下框架固定连接。
7.根据权利要求6所述的一种用于海上水下桥墩清洗机器人,其特征在于:所述上框架包括第一上架体和第二上架体,所述第一上架体的首端与所述第二上架体的首端铰接,所述第一上架体的末端与第二上架体的末端通过紧固件固定连接,所述下框架包括第一下架体和第二下架体,所述第一下架体的首端与所述第二下架体的首端铰接,所述第一下架体的末端与第二下架体的末端通过紧固件固定连接。
8.根据权利要求7所述的一种用于海上水下桥墩清洗机器人,其特征在于:所述连接杆至少具有两个,其中一个连接杆的上端连接于第一上架体的首端处,连接杆的下端连接于第一下架体的首端处,另一个连接杆的上端连接于第二上架体的首端处,连接杆的下端连接于第二下架体的首端处,两个连接杆之间通过紧固件进行连接。
9.一种基于权利要求1-8任一所述的用于海上水下桥墩清洗机器人的使用方法,其特征在于:包括以下步骤:
技术总结
本发明公开了一种用于海上水下桥墩清洗机器人及使用方法,包括机架以及爬行机构和清洗机构,爬行机构包括第一爬行组件和第二爬行组件,第一爬行组件和第二爬行组件分别包括至少两个爬行单元,每一爬行单元包括分别包括固定板、夹紧块、升降驱动件和夹紧驱动件,升降驱动件包括升降本体和升降驱动端,升降驱动端的上端与机架的上侧连接,升降驱动端的下端与机架的下侧连接,固定板上设置于升降本体上,夹紧驱动件包括夹紧本体和夹紧驱动端,夹紧块安装于夹紧驱动端上,两个爬行组件交替工作,实现机架的升降,清洗机构包括喷头和驱动机构。本发明提供一种用于海上水下桥墩清洗机器人及使用方法,结构简单,使用方便,造价便宜。
技术研发人员:张雷,宋瑞银,林躜,张慧娟,马钧源,王正均,胡国瑞,何锡杰,唐康平
受保护的技术使用者:浙大宁波理工学院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!