一种缆索检测机器人及其工作方法
本发明涉及桥梁检测领域,具体是一种缆索检测机器人及其检测方法。
背景技术:
1、(1)斜拉桥作为现代桥梁的新形式,在世界范围内得到了广泛的应用。作为斜拉桥主要受力构件之一的缆索长期暴露在空气中,经风吹雨淋日晒,缆索表面的聚乙烯护套将会产生不同程度的硬化和开裂现象,给护套内的钢丝束带来锈斑、断丝等严重的问题。应用于工程实际的缆索维护方式主要由人工检测,不仅效率低下,而且难以保障人员安全,所以人工检测已不再实用,使用工业机器人代替人工检测缆索成为必然趋势,故需一款机器人来检测外层护套的损伤情况。
2、(2)现有轮式检测机器人在缆索上运动时会挤压破坏原本开裂的护套,或加剧开裂情况,不能避开挤压微小损伤的地方。
3、(3)传统的缆索检测机器人只是采集到图像数据,没有对损伤位置进行实时的标定,不方便后续人员的检修或者更换。
技术实现思路
1、针对上述技术问题,本发明提出一种缆索检测机器人,该机器人集自适应不同缆索直径,利用重力自锁,自动采集缆索表面图像,避免挤压损伤位置,对损伤位置能即时标定等优点。
2、为了实现上述技术目的,本发明采用如下技术手段:
3、一种缆索检测机器人,包括:
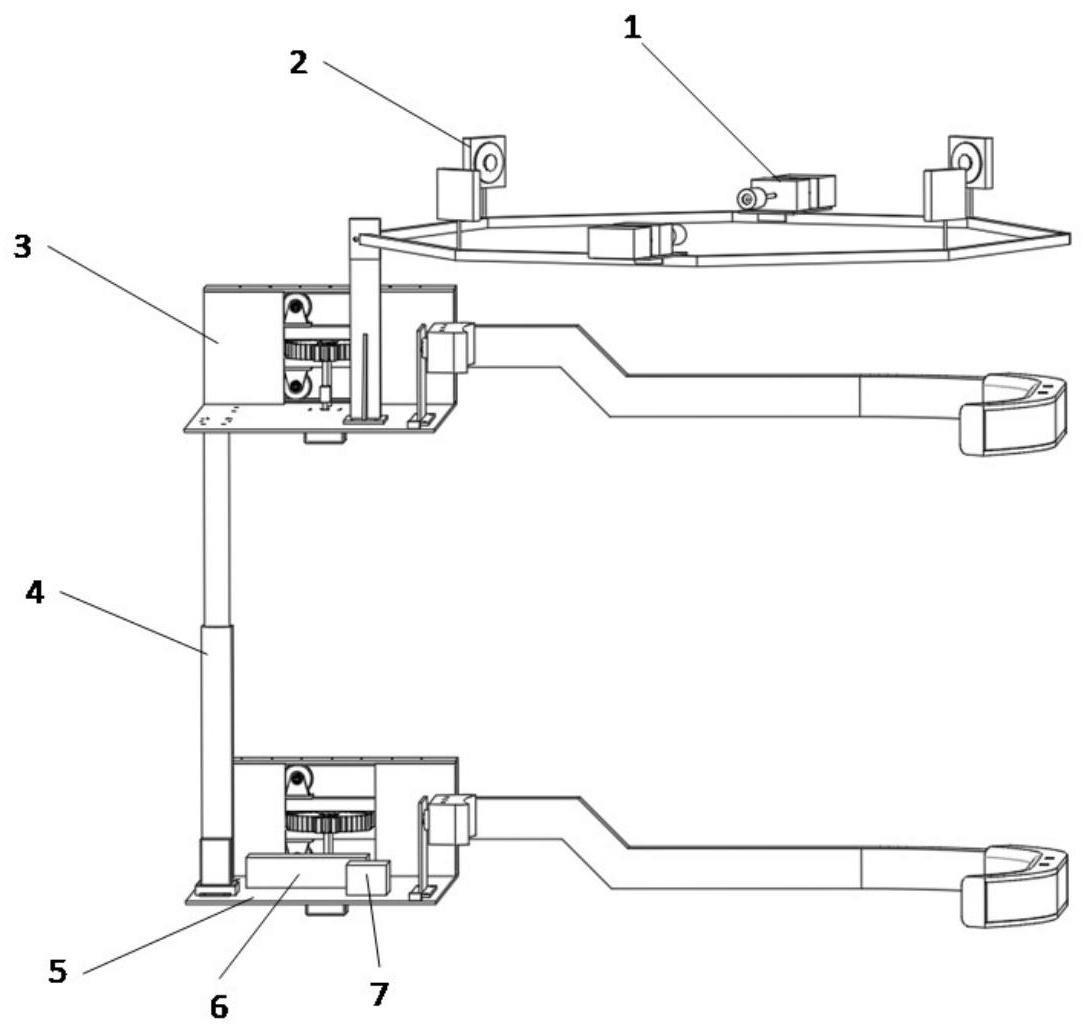
4、上下平行布置的第一变径夹紧装置、第二变径夹紧装置以及连接在上述两个变径夹紧装置之间的竖向升降机构,其中,
5、所述第一变径夹紧装置上设有第一压力传感器、图像采集装置和喷涂标定装置;
6、所述第一压力传感器用于采集第一变径夹紧装置的夹紧力;
7、所述图像采集装置,用于采集缆索表面缺陷图像;
8、所述喷涂标定装置,用于对缆索表面进行喷涂标定;
9、所述第二变径夹紧装置上设有第二压力传感器、倾角传感器、控制单元和电源;
10、所述第二压力传感器用于采集第二变径夹紧装置的夹紧力;
11、所述倾角传感器用于采集机器人当前缆索机器人的角度;
12、所述控制单元,其信号输入端与所述第一压力传感器、第二压力传感器、倾角传感器以及图像采集装置连接,信号输出端与所述第一变径夹紧装置、第二变径夹紧装置、竖向升降机构以及喷涂标定装置连接。
13、所述第一变径夹紧装置包括:
14、第一支架;
15、第一夹靠部,固定设置在所述第一支架上;
16、第一悬臂,其一端通过第一水平直线伸缩机构与所述第一支架连接,另一端悬伸设置且设有第二夹靠部,所述第一夹靠部和第二夹靠部之间形成夹持缆索的第一夹持空间;第一夹靠部与第一支架之间设有所述第一压力传感器;
17、所述第二变径夹紧装置包括:
18、第二支架;
19、第三夹靠部,固定设置在所述第二支架上;
20、第二悬臂,其一端通过第二水平直线伸缩机构与所述第二支架连接,另一端悬伸设置且设有第四夹靠部,所述第三夹靠部和第四夹靠部之间形成夹持缆索的第二夹持空间;第三夹靠部与第二支架之间设有所述第二压力传感器。
21、所述第一悬臂包括第一悬臂连接段、第一倾斜过渡段以及第一悬臂夹持段,所述第一悬臂夹持段的末端连接所述第二夹靠部,所述第一夹靠部与所述第二夹靠部处于不同的水平高度;
22、所述第二悬臂包括第二悬臂连接段、第二倾斜过渡段以及第二悬臂夹持段,所述第二悬臂夹持段的末端连接所述第三夹靠部,所述第三夹靠部与所述第四夹靠部处于不同的水平高度。
23、所述第一水平直线伸缩机构与第二水平直线伸缩机构的结构相同,均包括:
24、电机,其驱动轴通过齿轮齿条传动机构与所述悬臂的一端侧臂传动连接;
25、所述悬臂与所述支架之间通过水平直线滑动副连接。
26、所述水平直线滑动副包括:
27、直线轮轨,固定在所述支架上;
28、滚轮,安装在所述悬臂上,所述滚轮能够在所述直线轮轨上移动。
29、还包括安装架,所述安装架包括:
30、第一竖杆,底部与所述第一支架固定连接,上端一侧固定有一横向设置的环形横架,所述环形横架的内径与所述第一夹靠部和第二夹靠部之间的最大夹持间距相同;所述环形横架上安装有所述图像采集装置和所述喷涂标定装置。
31、所述第一夹靠部、第二夹靠部、第三夹靠部以及第四夹靠部的夹持表面均设有增大摩擦用的皮套层。
32、所述喷涂标定装置包括:
33、分类储漆箱、分漆管、抽漆泵、导漆管以及喷头,其中,分类储漆箱通过所述分漆管与所述抽漆泵进料口连接,抽漆泵出料口通过所述导漆管与所述喷头连接。
34、本发明进一步公开了一种基于所述缆索检测机器人的工作方法,包括以下步骤:
35、s1、首先将机器人放置在缆索上,此时,第一变径夹紧装置和第二变径夹紧装置的直径均处于最大值,控制单元首先控制第二变径夹紧装置收缩直至第二变径夹紧装置与缆索夹紧,使第二变径夹紧装置先固定在缆索上,此时,所述第二压力传感器将夹持力反馈给控制单元;然后第一变径夹紧装置夹紧、第二变径夹紧装置放松,竖向伸缩机构收缩,不断的循环,在缆索上爬形;
36、s2、图像采集装置实时收集缆索表面的图像信息,进行识别,同时,所述倾角传感器感知当前缆索机器人的角度,根据倾角的不同,控制单元通过控制脉冲信号的频率和电流大小来调节第一变径夹紧装置和第二变径夹紧装置在缆索上的夹紧力;
37、s3、当图像采集装置检测到损伤位置,控制单元控制竖向伸缩机构和第一变径夹紧装置、第二变径夹紧装置,避开损伤位置,避免造成二次损伤和加剧损伤程度;同时,图像采集装置将数据传到控制单元,控制单元对缆索表面的缺陷进行分类;
38、s4、根据识别出的不同的损伤类型,控制单元对喷涂标定装置进行控制,对损伤位置附近喷涂不同颜色标记,方便后续施工维修人员根据不同损伤类型检修。
39、步骤s3中,所述图像采集装置将数据传到控制单元后,控制单元首先对所述图像进行预处理,采用滤波等方法对图像信息进行降噪;比较不同的边缘检测算法,通过形态学运算提取表面缺陷特征,创建缺陷特征训练集,并使用vggnet网络模型结构训练缺陷分类模型,实现控制单元对缆索表面缺陷的分类。
40、有益效果:
41、本发明相比于现有缆索检测机器人具有以下几个技术优点:
42、第一.本发明可以适应不同的直径缆索,不同倾斜角度进行检测,夹紧装置还可利用重力自锁夹紧。
43、第二.本发明实现了缆索检测的自动化,自动采集缆索表面图像,夹紧装置可越过损伤位置,避免挤压损伤位置。
44、第三.本发明还实现了对损伤位置,损伤类型的即时标定,方便后续人员的检修。
45、第四.本发明体积较小,方便搬运。
技术特征:
1.一种缆索检测机器人,其特征在于,包括:
2.根据权利要求1所述的缆索检测机器人,其特征在于,所述第一变径夹紧装置包括:
3.根据权利要求2所述的缆索检测机器人,其特征在于,所述第一悬臂包括第一悬臂连接段、第一倾斜过渡段以及第一悬臂夹持段,所述第一悬臂夹持段的末端连接所述第二夹靠部,所述第一夹靠部与所述第二夹靠部处于不同的水平高度;
4.根据权利要求2所述的缆索检测机器人,其特征在于,所述第一水平直线伸缩机构与第二水平直线伸缩机构的结构相同,均包括:
5.根据权利要求4所述的缆索检测机器人,其特征在于,所述水平直线滑动副包括:
6.根据权利要求2所述的缆索检测机器人,其特征在于,还包括安装架,所述安装架包括:
7.根据权利要求2所述的缆索检测机器人,其特征在于,所述第一夹靠部、第二夹靠部、第三夹靠部以及第四夹靠部的夹持表面均设有增大摩擦用的皮套层。
8.根据权利要求1所述的缆索检测机器人,其特征在于,所述喷涂标定装置包括:
9.一种基于权利要求1~8中任一所述缆索检测机器人的工作方法,其特征在于,包括以下步骤:
10.根据权利要求9所述的缆索检测机器人的工作方法,其特征在于,步骤s3中,所述图像采集装置将数据传到控制单元后,控制单元首先对所述图像进行预处理,采用滤波方法对图像信息进行降噪;通过形态学运算和sobel边缘检测算子对缆索表面缺陷特征进行提取,创建缺陷特征训练集,利用vggnet网络模型结构训练缺陷分类模型,实现缆索表面缺陷自主识别分类的目的。
技术总结
本发明公开了一种缆索检测机器人及其工作方法,机器人包括上、下平行布置的第一变径夹紧装置、第二变径夹紧装置以及连接在上述两个变径夹紧装置之间的竖向升降机构,其中,第一变径夹紧装置上设有喷涂标定装置和图像采集装置;控制单元和电源均固定在第二变径夹紧装置上。本发明机器人通过两个变径夹紧装置以及竖向伸缩机构伸展在不同直径的缆索上爬行,通过图像采集装置采集到缆索表面信号,反馈到控制单元,控制单元进行损伤判断,进行分类,再通过喷涂标定装置喷涂不同颜色的漆,进行损伤位置标定,方便后续人员的修补或者更换。
技术研发人员:彭玉兴,李荣兴,朱真才,常向东,周公博,卢昊,曹国华,李东旭,李杰
受保护的技术使用者:中国矿业大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!