基于电磁铁吸附的船舶飞行甲板金属异物清扫机器人结构
本发明涉及金属异物清扫,尤其针对机场跑道、船舶飞行甲板等应用环境,具体是一种基于电磁铁吸附的船舶飞行甲板金属异物清扫机器人结构。
背景技术:
1、船舶飞行甲板是海上飞机起飞和降落的重要场所,船舶甲板上干净无异物的环境是海上飞机安全起降的重要保证。目前船舶上飞行甲板的清扫主要依靠人工“地毯式”搜索,整个过程费时费力,尤其是具有较大甲板面积的大型船只。依靠人类肉眼识别异物,并手动捡起清理一直以来存在严重的弊端,随着机器人技术的发展,采用高性能检测系统和机器人自动清扫的技术亟需在船舶飞行甲板环境中进一步应用研究。
2、船舶飞行甲板上对海上飞机威胁最大的一类异物是金属异物,目前的一些清扫机器人大多采用滚刷或者边刷的结构进行清扫,由于金属异物的密度较大,所以比较难清理。在一些采用真空吸附的清扫机器人中,金属异物对机器人内部结构的冲击容易导致机器真空吸附管道和滤网设备容易损坏,因此设计一种新型的主要针对金属异物的清扫机器人迫在眉睫。
技术实现思路
1、为解决现有技术的不足,本发明提出一种基于电磁铁吸附的船舶飞行甲板金属异物清扫机器人结构。该金属异物清扫机器人结构利用电磁铁吸附原理,将电磁铁阵列均布在周向转动的链轮上,将电磁铁的行程分成导电区域和绝缘区域,采用物理分割的方法实现了金属异物的吸附与解吸附,该设计结构简单、功能齐全、可靠性高,具有清扫质量高、移动能力强、控制方便等优点。
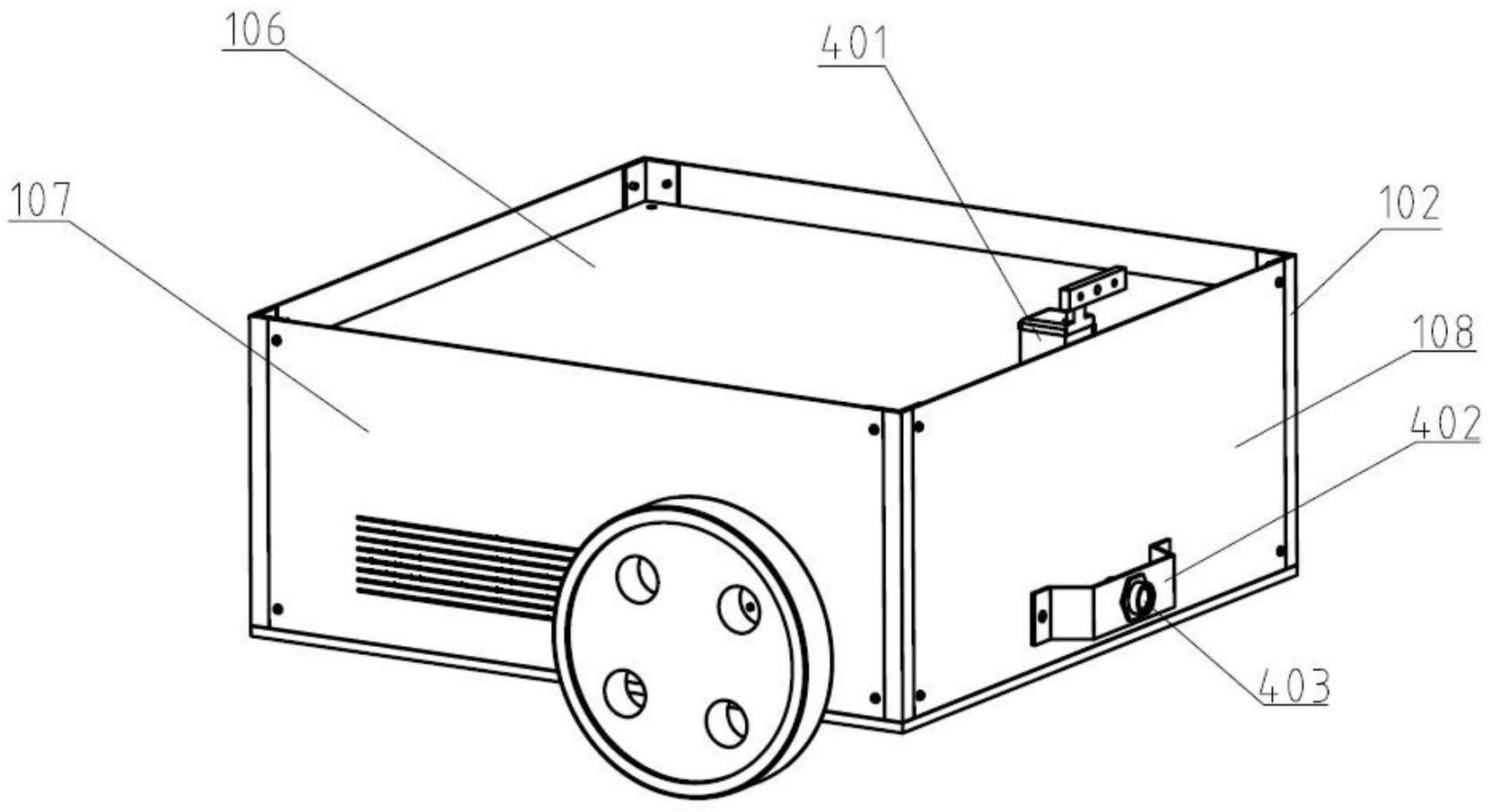
2、本发明解决所述技术问题的技术方案是,设计基于电磁铁吸附的船舶飞行甲板金属异物清扫机器人结构,其特征在于,该金属异物清扫机器人结构包括车体、驱动系统、清扫系统、异物收纳盒,其中车体为由水平设置的隔板隔开的上、下两层的箱体结构,该箱体结构的顶部无盖,驱动系统及清扫系统设置于箱体结构的下部;
3、所述驱动系统包括两个驱动组件和万向轮,其中驱动组件包括驱动步进电机、驱动步进电机支架、直角减速器、直角减速器支架、车轮,两个驱动组件呈镜面对称的设置在车体的下部;在车体的两个横遮板下部的前侧对称位置各设置有一个通孔,两个车轮相对的设置在该两个通孔的外侧,在通孔的内侧均设置有一个直角减速器支架,直角减速器设置在直角减速器支架上,车轮固定在直角减速器的输出轴上;直角减速器的后侧通过驱动步进电机支架设置有驱动步进电机,驱动步进电机的输出轴设置在直角减速器的输入轴孔内;在车体的底板底面的后侧的中部固定安装有万向轮;
4、所述清扫系统包括电磁铁、左导电板、右导电板、驱动链轮、从动链轮、驱动链轮轴、从动链轮轴、带侧耳链条、清扫步进电机、梅花联轴器、一号轴承座、二号轴承座、三号轴承座、四号轴承座、一号轴承座支撑、二号轴承座支撑、三号轴承座支撑、四号轴承座支撑、直角连接块、异物收纳盒组成;
5、左导电板与右导电板分别通过各自的直角连接块对称的固定在车体底板上表面的左、右两侧;在左导电板的中间高度位置的前、后两端各设置有一个通孔,在右导电板的中间高度位置上也设置有两个与左导电板上通孔的位置正对的通孔,链轮从动轴的两端分别设置在左导电板与右导电板的前端通孔内,链轮驱动轴的两端分别设置在左导电板与右导电板的后端通孔内;驱动链轮固定在链轮驱动轴的中部,从动链轮固定在链轮从动轴的中部;链轮从动轴的两末端分别设置在二号轴承座、三号轴承座内,二号轴承座固定在二号轴承座支撑的顶部,三号轴承座固定在三号轴承座支撑的顶部;链轮驱动轴的两末端分别设置在一号轴承座、四号轴承座内,一号轴承座固定在一号轴承座支撑顶部的一侧,清扫步进电机固定安装在一号轴承座支撑顶部的另一侧,链轮驱动轴的位于一号轴承座上的轴段的末端与清扫步进电机的输出轴之间通过梅花联轴器连接;四号轴承座固定在四号轴承座支撑的顶部;一号轴承座支撑、二号轴承座支撑、三号轴承座支撑、四号轴承座支撑的底部均通过螺钉与车体底板的上表面固定连接;
6、在左导电板、右导电板的内侧面的中部各设置有一圈电刷轨道,两者上的电刷轨道正对且呈镜面对称;该电刷轨道为由两个半环形槽分别与两个平行设置的方形槽的两端衔接在一起的封闭结构,左导电板、右导电板上的通孔的圆心与相应电刷轨道上的对应的半环形槽的圆心重合;电刷轨道的下侧的方形槽的底面的前部设置为导电区域,电刷轨道的其它面均为绝缘区域,左导电板、右导电板的电刷轨道上的导电区域分别与电源的正、负极导通;
7、电磁铁设计为长方体结构,由壳体、电磁铁芯、导电绕组、漆包线过程;电磁铁芯为长方体,其外周缠绕有导电绕组,电磁铁芯与导电绕组设置于长方体的壳体的内部并通过密封凝胶进行密封与固定;导电绕组的正、负极设置于电磁铁芯的两端,并分别通过漆包线电连接一个圆形铜制的电磁铁电刷;壳体背部长度方向中心线上设计有两个螺纹孔,通过螺钉把电磁铁固定于带侧耳链条的耳板上;
8、带侧耳链条套装在驱动链轮、从动链轮上,多个电磁铁通过螺钉横向均匀固定在带侧耳链条的耳板通孔上,且电磁铁左、右两端的电磁铁电刷位于左导电板、右导电板的内侧面的电刷轨道内,与电刷轨道导电区域正对的电磁铁电刷均与导电区域直接接触;在从动链轮下方的车体底板上开有通孔,在驱动链轮下方的车体底板上设置有异物收纳盒。
9、与现有技术相比,本发明有益效果在于:本发明设计的基于电磁铁吸附的船舶飞行甲板金属异物清扫机器人结构,利用电磁铁吸附原理,将电磁铁阵列均布在周向转动的链轮上,将电磁铁的行程分成导电区域和绝缘区域,采用物理分割的方法实现了金属异物的吸附与解吸附,该设计结构简单、功能齐全、可靠性高。并在金属异物解吸附区域下方设置有异物收纳盒,将金属异物的吸附与收集工作顺畅衔接。随着链轮传动的不间断进行,清扫过程也不间断,吸附与收集功能相对独立,金属异物的清扫过程连贯、协调、有序,使得该金属异物清扫机器人的清扫效果与效率得到提升。此外,该金属异物清扫机器人结构上设置有异物识别系统与控制系统,通过异物识别系统可以准确的识别出异物的类型,再利用控制系统控制步进电机进行相应的动作,进一步提升该金属异物清扫机器人的工作效率。
技术特征:
1.基于电磁铁吸附的船舶飞行甲板金属异物清扫机器人结构,其特征在于,该金属异物清扫机器人结构包括车体、驱动系统、清扫系统、异物收纳盒,其中车体为由水平设置的隔板隔开的上、下两层的箱体结构,该箱体结构的顶部无盖,驱动系统及清扫系统设置于箱体结构的下部;
2.根据权利要求1所述的基于电磁铁吸附的船舶飞行甲板金属异物清扫机器人结构,其特征在于,在车体后侧板的下端的中部设有用于容纳异物收纳盒的槽口,异物收纳盒为抽拉式。
3.根据权利要求1所述的基于电磁铁吸附的船舶飞行甲板金属异物清扫机器人结构,其特征在于,带侧耳链条上共固定有38块电磁铁,两个电磁铁的横向间距有30mm。
4.根据权利要求1所述的基于电磁铁吸附的船舶飞行甲板金属异物清扫机器人结构,其特征在于,左导电板、右导电板采用abs材料通过3d打印成型,电刷轨道的深度占相应导电板厚度的一半。
5.根据权利要求1所述的基于电磁铁吸附的船舶飞行甲板金属异物清扫机器人结构,其特征在于,电刷轨道的下侧的方形槽的底面的前部的一半长度的区域范围为导电区域。
6.根据权利要求1所述的基于电磁铁吸附的船舶飞行甲板金属异物清扫机器人结构,其特征在于,车体由底板、四根立柱、隔板、两个横遮板、前侧遮板、后侧遮板构成;其中,立柱为直角连接件,在其直角连接片的上、下两端的左、右两侧均设置有螺钉孔,且在其底部以及上部均设置有方形连接片,底板的四角通过螺钉分别与四根立柱的底部的方形连接片固定连接,两个横遮板、前侧遮板、后侧遮板通过螺钉分别与四根立柱的对应的直角连接片固定连接,隔板的四角设置在四根立柱的上部的方形连接片上。
7.根据权利要求1-6任一项所述的基于电磁铁吸附的船舶飞行甲板金属异物清扫机器人结构,其特征在于,该金属异物清扫机器人结构上还设置有异物识别系统与控制系统,异物识别系统包括视觉传感器、金属识别传感器支架、金属识别传感器、图像采集卡,其中视觉传感器固定在车体的隔板上表面的前侧,金属识别传感器支架通过粘合的方式固定在车体的前侧遮板的外表面下部的中间位置,金属识别传感器固定在金属识别传感器支架上且其感应端水平朝前设置;
8.根据权利要求7所述的基于电磁铁吸附的船舶飞行甲板金属异物清扫机器人结构,其特征在于,所述视觉传感器预采用intelrealsensed455深度相机。
9.根据权利要求7所述的基于电磁铁吸附的船舶飞行甲板金属异物清扫机器人结构,其特征在于,所述金属识别传感器采用禄捷茂jm8000-y40-243n1电感式接近开关。
10.根据权利要求7所述的基于电磁铁吸附的船舶飞行甲板金属异物清扫机器人结构,其特征在于,所述cpu采用stm32f103c8t6单片机。
技术总结
本发明公开一种基于电磁铁吸附的船舶飞行甲板金属异物清扫机器人结构,该金属异物清扫机器人结构包括车体、驱动系统、清扫系统、异物收纳盒,其中车体为由水平设置的隔板隔开的上、下两层的箱体结构,该箱体结构的顶部无盖,驱动系统及清扫系统设置于箱体结构的下部。利用电磁铁吸附原理,将电磁铁阵列均布在周向转动的链轮上,将电磁铁的行程分成导电区域和绝缘区域,采用物理分割的方法实现了金属异物的吸附与解吸附,并在金属异物解吸附区域下方设置有异物收纳盒,随着链轮传动的不间断进行,清扫过程也不间断,吸附与收集功能相对独立,金属异物的清扫过程连贯、协调、有序,使得该金属异物清扫机器人的清扫效果与效率得到提升。
技术研发人员:田颖,赵晓宇,郭明义,崔浩哲
受保护的技术使用者:河北工业大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!