滚刷式除雪设备液压控制系统及其控制方法
本发明涉及除雪设备,具体是一种滚刷式除雪设备液压控制系统及其控制方法。
背景技术:
1、冬季除雪是北方高速公路及市政冬季养护工作的重点,道路除雪工作完成的效率直接影响到了道路通行安全,同时也影响到一定的经济和社会效益,除雪撒布车以机械化除雪为主,辅以化学除雪方式。除雪滚刷是除雪撒布车上的机械除雪装置,滚刷的毛刷与地面的有效接触是高质量除雪的有效保证。目前,主要通过人工手动调节滚刷离地间距,调节精度低,自动化程度低,不利于高效除雪效率和除雪效果理想。现有的滚刷多为低速辗刷(转速≤250r/min)且转速不能调节,滚刷直径小,轮刷长度不够,不能清扫完整车道,因此适用性较差。
2、现有的专利文献多集中于滚刷的尺寸与滚刷的设计方式提高清扫效率和使用范围,如中国专利申请cn202210562148.9,通过改变滚刷的长度适应不同宽度路面的清扫;中国专利申请cn201911314066.7,通过智能控制滚刷离地距离对地面进行贴合清洗,但整个装置的智能化调节范围较小,还需要人工过多操作来进行路面清扫,会造成路面边缘部分清洗不充分。随着自动化和智能化的发展,传统的被动式调节的方法局限性越来越大,难以精确判断清扫装置与路面之间的高度,无法实现清扫设备液压系统自适应控制。
技术实现思路
1、为了解决现有路面除雪车的滚刷靠人工手动调节离地间距不准确、自动化程度低、不利于高效精准除雪的问题,本发明提供一种滚刷式除雪设备液压控制系统及其控制方法,其自动化及智能化程度高、效率高、可精准自动调节滚刷离地间距,实现滚刷除雪过程的智能控制。
2、为实现上述目的,本发明提供如下技术方案:
3、一种滚刷式除雪设备液压控制系统,所述除雪设备悬挂于工程车辆车头,包括控制支架部件和滚刷部件;所述控制支架部件包括车体连接架、上三角架、升降液压缸、下三角架、转向液压缸、副梁总成、支撑轮、俯仰液压缸;所述车体连接架安装于工程车辆前端,上三角架、下三角架一端铰接于车体连接架,升降液压缸安装于上三角架和车体连接架的中部控制整个滚刷部件在竖直方向的升降;所述上、下三角架后端与车体连接架铰接,前端铰接副梁总成;所述转向液压缸一端安装于车体连接架的外侧,一端安装于副梁总成的外侧,通过转向液压缸的伸缩控制滚刷部件的偏转;所述俯仰液压缸一端安装于滚刷部件,另一端安装于副梁总成,通过俯仰液压缸的伸缩控制滚刷部件的俯仰。
4、作为本发明的再进一步方案,所述滚刷部件包括滚刷架、滚刷、滚刷液压马达、压雪板、压雪板液压油缸;所述滚刷安装于滚刷架的中部,滚刷的两侧安装有液压马达;所述滚刷由两侧的滚刷液压马达驱动。
5、本发明的进一步技术方案,提供一种液压驱动的滚刷式除雪设备液压系统的控制方法,由采集的车速、雪厚度等信息,计算滚刷的最佳转速、出口压力、俯仰油缸伸缩量,同时采集滚刷转速,调节变量泵输入电流大小使得转速满足要求;根据采集得到的液压油出口压力调节滚刷俯仰、升降以保证滚刷毛与地面的接触宽度,使得滚刷对地压的压力满足要求。
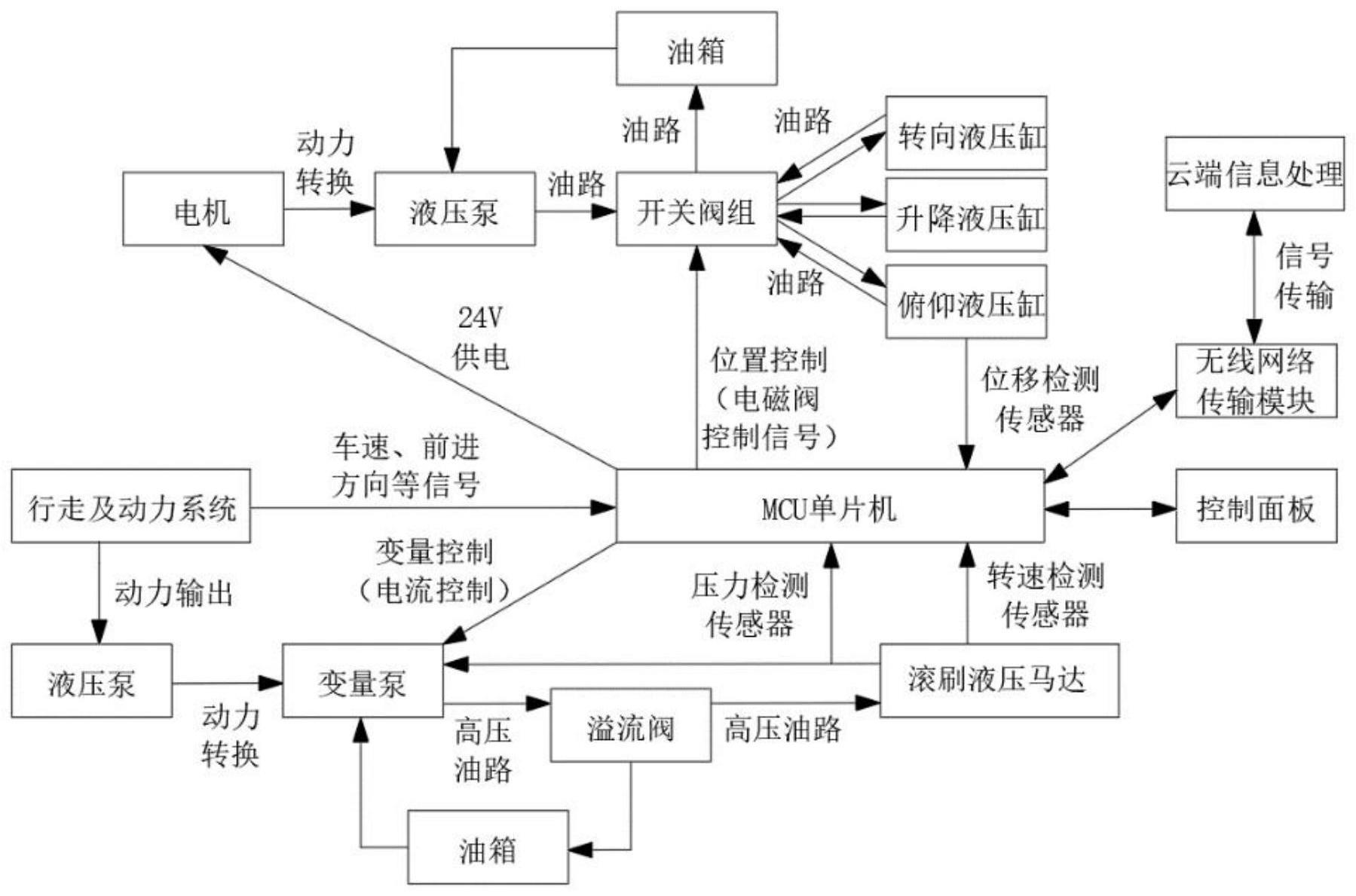
6、作为本发明的进一步方案,车辆的行走及动力系统进行动力输出到液压泵,而后动力转换到变量泵,采用单片机直接来控制电控变量泵排量,实现对滚刷液压马达的转速控制,变量泵和滚刷液压马达间设置溢流阀对油路进行保护,同时单片机采集转速传感器、压力传感器的信号用于自适应反馈控制。
7、作为本发明的再进一步方案,采用单片机与专用控制器间通过总线通讯,专用控制器通过电流信号来控制电控变量泵排量,实现滚刷液压马达的转速智能控制。
8、作为本发明的进一步方案,24v液压动力源驱动电机,通过动力转换驱动液压泵,进而为滚刷的转向、俯仰和升降液压缸提供动力,单片机通过电磁阀控制信号对双向开关阀组进行控制,实现转向、俯仰和升降液压缸伸缩控制,同时单片机采集位移传感器的信号,用于反馈控制。
9、作为本发明的进一步方案,通过单片机实时采集滚刷中心距地面距离h数据信号,反馈控制俯仰液压缸伸缩量l得到设定值h1,通过公式控制滚刷接地宽度,其中r是滚刷半径。
10、作为本发明的进一步方案,创建滚刷受力和扭矩与液压系统间的关系,除雪阻力μ1为刷毛与干雪的阻力系数,b为滚刷宽度,h为清雪厚度,ρ为积雪密度,为刷毛与干雪的相对运动速度,d为滚刷直径,n为滚刷工作转速;滚刷克服摩擦阻力fμ=μ2n,n为刷毛作用至地面上的正压力,μ2为刷毛与路面的摩擦系数,其中e为刷毛材料的弹性模量,j为刷毛截面的极惯性矩,z为触地刷毛数量,s为刷毛的自由长度,δ为滚刷毛接地变形量;滚刷克服清雪阻力与摩擦阻力所需的滚刷转矩其中k2=0.085μ2dejz;滚刷液压马达的驱动扭矩p为液压系统压力,vq为马达排量,ηm为马达机械效率,马达的驱动扭矩与滚刷转矩相等,液压系统压力为其中设定压力为目标值,实时检测系统的工作压力并与目标值比较,通过pid控制器进行处理控制电比例阀的开度,从而控制俯仰液压缸行程。
11、作为本发明的进一步方案,通在滚刷两端挡板上部分别安装激光发射器和激光接收器,可以检查滚刷毛的磨损程度。当滚刷的滚刷毛磨损量大于设定值,激光发射器发出的激光能被激光接收器接收实现滚刷更换预警。
12、作为本发明的进一步方案,通过远程监控对天气信息、路况信息、位置信息的采集和通过力学、压力、激光传感器的数据采集,对车身及除雪设备进行基于边缘计算的液压智能控制。
13、与现有技术相比,本发明具有以下有益效果:
14、1、本发明中除雪设备悬挂于工程车辆车头,包括控制支架部件和滚刷部件;控制支架部件包括车体连接架、上三角架、升降液压缸、下三角架、转向液压缸、副梁总成、支撑轮、俯仰液压缸;升降液压缸安装于上三角架和车体连接架的中部控制整个滚刷部件在竖直方向上的升降;通过转向液压缸的伸缩控制滚刷部件的偏转;通过俯仰液压缸的伸缩控制滚刷部件的俯仰;比对现有除雪设备,结构完整,功能性优越;
15、2、本发明通过采集的车速、雪厚度等信息,计算最佳滚刷转速、出口压力、俯仰油缸伸缩量,同时采集滚刷转速,调节变量泵输入电流大小使得转速满足要求;由出口压力采集信息,调节俯仰、升降以调整滚刷毛与地面的接触宽度,使得滚刷对地压力满足要求,可以实现除雪设备液压系统自适应控制;
16、3、本发明通过单片机实时采集滚刷中心距地面距离h数据信号,反馈控制俯仰液压缸伸缩量l得到设定值h1,通过公式控制滚刷接地宽度,其中r是滚刷半径。通过在两侧挡板上部分别安装激光发射器和激光接收器,检查滚刷毛的磨损程度。在滚刷毛长度低于设定的最小值时,激光接收器接收到激光,预警更换滚刷;
17、4、本发明通过远程监控对天气信息、路况信息、位置信息的采集以及通过力学、压力、激光传感器的数据采集,对车身及除雪设备进行基于边缘计算的液压智能控制。
技术特征:
1.一种滚刷式除雪设备液压控制系统,其特征在于,所述液压驱动的滚刷式除雪设备悬挂于工程车辆车头,包括控制支架部件和滚刷部件;所述控制支架部件包括车体连接架、下三角架、转向液压缸、支撑轮、俯仰液压缸、副梁总成、上三角架、升降液压缸;
2.根据权利要求1所述的一种滚刷式除雪设备液压控制系统,其特征在于,所述滚刷部件包括滚刷架、滚刷、滚刷液压马达、压雪板、压雪板液压油缸;所述滚刷安装于滚刷架的中部,滚刷的两侧安装有液压马达;所述滚刷由两侧的滚刷液压马达所驱动。
3.根据权利要求1或2所述的一种滚刷式除雪设备液压控制系统的控制方法,其特征在于,由采集的车速、雪厚度信息,计算最佳滚刷转速、出口压力、俯仰油缸伸缩量并采集滚刷转速,调节变量泵输入电流大小使得转速满足要求;由出口压力调节俯仰、升降以调整滚刷毛与地面的接触面积,使得滚刷清扫宽度满足要求。
4.根据权利要求3所述的控制方法,其特征在于,车辆的行走及动力系统进行动力输出到液压泵,而后动力转换到变量泵,采用单片机直接控制变量泵排量,实现滚刷液压马达的转速控制,变量泵和滚刷液压马达间设置溢流阀对油路进行保护,同时单片机采集转速传感器、压力传感器的输出信号用于反馈控制。
5.根据权利要求4所述的控制方法,其特征在于,采用单片机与专用控制器间通过总线通讯,专用控制器通过电流信号来控制电控变量泵排量,实现滚刷液压马达的转速自适应控制。
6.根据权利要求3所述的控制方法,其特征在于,采用24v液压动力源驱动电机,通过动力转换驱动液压泵,进而为转向、俯仰和升降液压缸提供动力,单片机通过电磁阀控制信号对双向开关阀组进行控制,实现转向、俯仰和升降液压缸伸缩控制,同时单片机采集位移传感器的信号,用于自适应反馈控制。
7.根据权利要求3所述的控制方法,其特征在于,通过单片机实时采集滚刷中心距地面距离h数据信号,反馈控制俯仰液压缸伸缩量l得到设定值h1,通过公式控制滚刷接地宽度,其中r是滚刷半径。
8.根据权利要求3所述的控制方法,其特征在于,创建滚刷受力、扭矩与液压系统之间的关系,除雪阻力μ1为滚刷毛与干雪的阻力系数,b为滚刷宽度,h为清雪厚度,ρ为积雪密度,为滚刷毛与干雪的相对运动速度,d为滚刷直径,n为滚刷工作转速;
9.根据权利要求3所述的控制方法,其特征在于,在滚刷两端挡板上同中心轴线分别安装激光发射器和激光接收器检查滚刷毛的磨损程度,在滚刷毛磨损到无法遮挡激光达到激光接收器时预警更换滚刷。
10.根据权利要求3所述的控制方法,其特征在于,通过远程监控对天气信息、路况信息、位置信息的采集和通过力学、压力、激光传感器的数据采集,对车辆及除雪设备通过边缘计算实现液压系统自适应智能控制。
技术总结
本发明公开了一种滚刷式除雪设备液压控制系统及其控制方法,包括控制支架部件和滚刷部件;所述控制支架部件包括车体连接架、下三角架、转向液压缸、支撑轮、俯仰液压缸、副梁总成、上三角架、升降液压缸;升降液压缸安装于上三角架和车体连接架的中部控制整个滚刷部件在竖直方向的升降;通过转向液压缸的伸缩控制滚刷部件的偏转;通过俯仰液压缸的伸缩控制滚刷部件的俯仰;通过采集的车速、积雪厚度等信息,经过计算得到最佳的滚刷转速、出口压力、俯仰油缸伸缩量,同时对滚刷转速进行采集,通过调节变量泵工作电流大小使得转速满足要求;通过采集出口压力,调节滚刷部件的俯仰、升降以调整其与地面的接触面积,实现除雪设备液压系统自适应控制。
技术研发人员:奚维斌,刘鹏,李连军,顾永奇,陈鹏,林玲龙,朱银峰,张耀奇,刘占磊,汪战平,许浩
受保护的技术使用者:中国科学院合肥物质科学研究院
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!