一种钢结构桥梁检修系统及方法与流程
本发明涉及桥梁检修,尤指一种钢结构桥梁检修系统及方法。
背景技术:
1、桥梁是架设在河流、铁路干线、公路上的供行人或车辆通过的道路,现有的桥梁一般采用钢筋桥梁结构,运用范围最为广泛。但是钢筋桥梁桥梁的建造时间长、成本高,钢结构桥梁应运而生。钢结构桥梁工期极短,最短只需几天,且钢构桥自重轻,跨度大,刚度好、具有可焊性,安装十分方便,但钢结构因其耐腐蚀性差的特点需要经常检修。
2、专利申请号为cn202011485927.0的专利文件公开了一种钢结构桥梁检修系统,通过板桥和检修车的互相配合实现桥梁的检修,但此技术受限于板桥上导轨的长度,在采集数据时仅依靠检修小车不够灵活,采集到的数据也不够全面。为此,我们提出一种钢结构桥梁检修系统及方法。
技术实现思路
1、为解决上述问题,本发明提供一种钢结构桥梁检修系统及方法,来解决系统采集数据时不够灵活和数据不够全面的问题。
2、为实现上述目的,本发明采用的技术方案是:一种钢结构桥梁检修系统,包括:检修无人机和、数据存储模块和监测控制模块;
3、所述检修无人机表面设有测距传感器,所述测距传感器与数据存储模块通信连接,所述检修无人机内设空腔,所述空腔内设有检修小车,所述检修无人机和检修小车均设有可调控的摄像头,所述摄像头设有过滤单元,所述过滤单元用于摄像头在收集数据的同时提取桥梁缺陷信息,并合理分配信息处理的优先级,所述优先级的判断标准基于缺陷类型对于桥梁的危害程度,所述检修无人机和检修小车的控制回路均设有滤波器,所述检修无人机和检修小车的身份识别采用rfid识别技术;
4、所述监测控制模块内设有监控单元和控制单元,所述监控单元用于与检修无人机和检修小车上的摄像头通信连接,所述控制单元用于控制检修无人机和检修小车的轨迹移动。
5、作为优选,所述过滤单元的工作步骤如下:
6、(1)针对摄像机所拍摄到的图片,按缺陷类型进行阈值分割,以提取出桥梁表面各点的关键帧图像;
7、(2)对所述关键帧图像进行预处理,以得到多个清晰的图像;
8、(3)将多个清晰的图像和桥梁表面缺陷各点的位置信息经过冗余计算后上传至云端服务器。
9、作为优选,所述检修无人机和检修小车内还设有gps定位装置、压力传感器、湿度传感器和超声波传感器,所述检修小车外设有机械手臂,所述机械手臂用于检修小车和桥梁的固定连接。
10、作为优选,所述检修系统还包括区域划分模块,所述区域划分模块用于根据预设的传感器与桥梁模型区域的对应关系,确定每一个传感器所对应的目标区域,其中,所述桥梁模型基于桥梁施工工程图建立。
11、作为优选,所述缺陷包括桥面沉降、桥面局部损害和桥梁裂纹。
12、一种钢结构桥梁检修方法,所述检修方法应用于上述的检修系统,所述检修方法包括以下步骤:
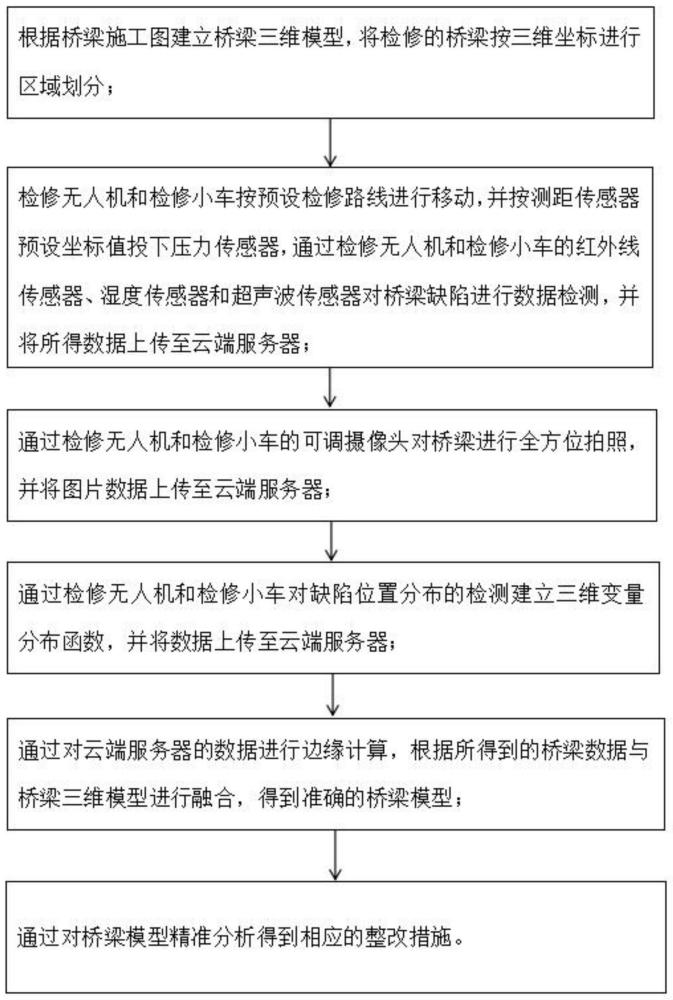
13、s1:根据桥梁施工图建立桥梁三维模型,将检修的桥梁按三维坐标进行区域划分;
14、s2:检修无人机和检修小车按预设检修路线进行移动,并按测距传感器预设坐标值投下压力传感器,通过检修无人机和检修小车的红外线传感器、湿度传感器和超声波传感器对桥梁缺陷进行数据检测,并将所得数据上传至云端服务器;
15、s3:通过检修无人机和检修小车的可调摄像头对桥梁进行全方位拍照,并将图片数据上传至云端服务器;
16、s4:通过检修无人机和检修小车对缺陷位置分布的检测建立三维变量分布函数,并将数据上传至云端服务器;
17、s5:通过对云端服务器的数据进行边缘计算,根据所得到的桥梁数据与桥梁三维模型进行融合,得到准确的桥梁模型;
18、s6:通过对桥梁模型精准分析得到相应的整改措施。
19、作为优选,对步骤s4得到的三维变量分布函数可记为如下:
20、f(x,y,z)=p(x,y,z);
21、上式表达的是缺陷落在坐标区域的概率,其中x,y,z表示三维坐标值,其中x,y,z的取值范围应小于或等于桥梁对应的长、宽和高。
22、作为优选,对上述三维变量分布函数进行求导得出概率密度函数,通过对概率密度函数求极值,从桥梁局部缺陷密度分布推导出整个桥梁缺陷的数量。
23、作为优选,所述s2中的检修路线基于桥梁模型的三维信息和待检修位置规划出的最佳巡检路线。
24、作为优选,在裂纹的检测基于opencv技术进行测量。
25、本发明的有益效果在于:
26、1.本发明设有检修无人机,检修无人机内设空腔装有检修小车,通过检修无人机和检修小车的配合,可以让系统在采集数据时更为灵活,通过rfid标签识别设备可对物体自动识别记录到后台,从而提高信息采集率和信息传输速度,实现智能化管理。
27、2.利用三维变量的分布函数描述在桥梁三维空间里,缺陷分布位置和落在该区域的概率,可以通过分布函数推算缺陷的数量,为桥梁模型提高了数据依据。
技术特征:
1.一种钢结构桥梁检修系统,其特征在于,包括:检修无人机、数据存储模块和监测控制模块;
2.根据权利要求1所述的一种钢结构桥梁检修系统,其特征在于,所述过滤单元的工作步骤如下:
3.根据权利要求1所述的一种钢结构桥梁检修系统,其特征在于,所述检修无人机和检修小车内还设有gps定位装置、压力传感器、湿度传感器和超声波传感器,所述检修小车外设有机械手臂,所述机械手臂用于检修小车和桥梁的固定连接。
4.根据权利要求1所述的一种钢结构桥梁检修系统,其特征在于,所述检修系统还包括区域划分模块,所述区域划分模块用于根据预设的传感器与桥梁模型区域的对应关系,确定每一个传感器所对应的目标区域,其中,所述桥梁模型基于桥梁施工工程图建立。
5.根据权利要求2所述的一种钢结构桥梁检修系统,其特征在于,所述缺陷包括桥面沉降、桥面局部损害和桥梁裂纹。
6.一种钢结构桥梁检修方法,其特征在于,所述检修方法应用于权利要求1-5任一项所述的检修系统,所述检修方法包括以下步骤:
7.根据权利要求6所述的一种钢结构桥梁检修方法,其特征在于,对步骤s4得到的三维变量分布函数可记为如下:
8.根据权利要求7所述的一种钢结构桥梁检修方法,其特征在于,对上述三维变量分布函数进行求导得出概率密度函数,通过对概率密度函数求极值,从桥梁局部缺陷密度分布推导出整个桥梁缺陷的数量。
9.根据权利要求6所述的一种钢结构桥梁检修方法,其特征在于,所述步骤s2中的检修路线基于桥梁模型的三维信息和待检修位置规划出的最佳巡检路线。
10.根据权利要求6所述的一种钢结构桥梁检修方法,其特征在于,在裂纹的检测基于opencv技术进行测量。
技术总结
本发明公开一种钢结构桥梁检修系统及方法,涉及桥梁检修技术领域,其包括:检修无人机、数据存储模块和监测控制模块;检修无人机表面设有测距传感器,检修无人机内设空腔,空腔内设有检修小车,检修无人机和检修小车均设有可调控的摄像头,摄像头设有过滤单元,过滤单元用于摄像头在收集数据的同时对数据信息进行分析,并合理分配信息处理的优先级,检修无人机和检修小车的身份识别采用RFID识别技术;监测控制模块内设有监控单元和控制单元,监控单元用于与检修无人机和检修小车上的摄像头通信连接,控制单元用于控制检修无人机和检修小车的轨迹移动。通过本发明可以解决系统采集数据时不够灵活和数据不够全面的问题。
技术研发人员:徐代明,熊伟,徐双双,朱奕智,吴伟雯
受保护的技术使用者:致邦控股(广东)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!