一种城市道路巡检设备的制作方法
本技术涉及道路巡检设备,具体为一种城市道路巡检设备。
背景技术:
1、城市道路巡检主要是检查路基各部分是否完整,尺寸是否符合标准和有无变形情况发生;检查路肩有无车辙、坑洼、隆起、沉陷、缺口现象发生,并检查横坡是否适度、表面是否坚实、整洁和与路面接茬是否平顺等等。
2、智能巡检机器人是为城市道路的巡检工作而设计的设备,其基本功能为移动监测平台,属于监测技术与机器人技术相融合的新型监测设备,可及时发现车辆的异常现象,提高工作效率和巡检质量,起到减员增效的作用。
3、但是现有护栏巡检机器人,在每次执行道路巡检工作时,还需工作人员从车内抱出,然后把机器放入护栏上端再进行工作,费时费力。
技术实现思路
1、基于此,本实用新型的目的是提供一种城市道路巡检设备,以解决上述背景技术提到的技术问题。
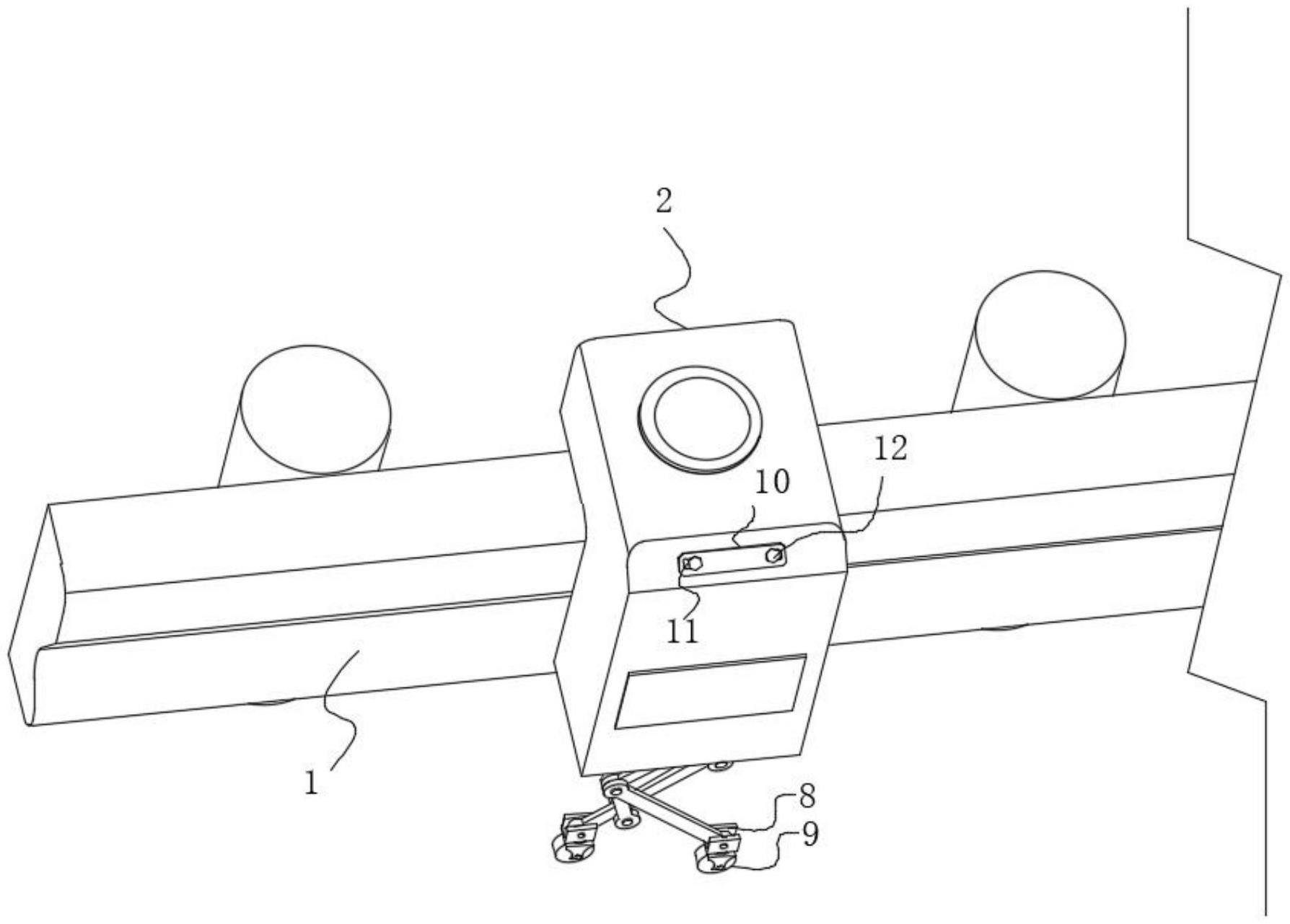
2、为实现上述目的,本实用新型提供如下技术方案:一种城市道路巡检设备,包括巡检设备壳体,所述巡检设备壳体活动安装在护栏的顶部,且巡检设备壳体的底部开设有凹槽,所述凹槽的内壁活动安装有伸缩组件,所述伸缩组件包括第一伸缩杆、第二伸缩杆、第三伸缩杆,所述第一伸缩杆的另一端活动连接有第二伸缩杆,所述第一伸缩杆的外壁设有第三伸缩杆,且通过第三伸缩杆使多组第一伸缩杆和第二伸缩杆相互连接,所述第二伸缩杆的外壁固定安装有连接块。
3、通过采用上述技术方案,解决了在每次执行道路巡检工作时,还需工作人员从车内抱出设备,然后再把机器放入护栏上端再进行工作的问题,省时省力,且提高了工作效率,通过磁块的设置,使得工作人员可快速把机器人放入护栏上,且巡检机器人在工作过程中遇到颠簸时,会减少晃动,提高了与护栏的贴合度。
4、本实用新型进一步设置为,所述巡检设备壳体的外壁设有限位块,且限位块的两端设有固定块。
5、通过采用上述技术方案,通过拉动限位块,且使第二伸缩杆底部的万向轮向前移动,限位块实则为巡检设备壳体上的拉手,便于通过万向轮推动巡检设备壳体自由移动。
6、本实用新型进一步设置为,所述限位块的内壁设有多组孔洞,且固定块位于孔洞的内壁。
7、通过采用上述技术方案,固定块对限位块向上的拉力进行限位,孔洞可使限位块与巡检设备壳体贴合,提供便利,但是不影响巡检机器人的工作。
8、本实用新型进一步设置为,所述巡检设备壳体的一侧活动连接有磁块,且磁块呈球状。
9、通过采用上述技术方案,巡检机器人在工作过程中遇到颠簸时,会减少晃动,提高了与护栏的贴合度,且磁块呈球状跟随机器移动,且会使磁块和护栏不断地贴合在一起。
10、本实用新型进一步设置为,所述限位块位于固定块的底部,且限位块为皮革拉手,以pvc和pu皮革的材质为主。
11、通过采用上述技术方案,皮革拉手材质柔软,材质较薄,不会对巡检机器人造成破坏,且美观实用。
12、本实用新型进一步设置为,所述连接块的底部活动安装有多组万向轮,且多组万向轮水平设置。
13、通过采用上述技术方案,不会同时受到颠簸路段的影响,且增强对巡检设备壳体的受力面积,且提高巡检设备壳体行驶时的稳定性。
14、综上所述,本实用新型主要具有以下有益效果:
15、本实用新型通过伸缩组件、万向轮的设置,解决了在每次执行道路巡检工作时,还需工作人员从车内抱出设备,然后再把机器放入护栏上端再进行工作的问题,省时省力,且提高了工作效率,通过磁块的设置,使得工作人员可快速把机器人放入护栏上,且巡检机器人在工作过程中遇到颠簸时,会减少晃动,提高了与护栏的贴合度。
技术特征:
1.一种城市道路巡检设备,包括巡检设备壳体(2),其特征在于:所述巡检设备壳体(2)活动安装在护栏(1)的顶部,且巡检设备壳体(2)的底部开设有凹槽(4),所述凹槽(4)的内壁活动安装有伸缩组件,所述伸缩组件包括第一伸缩杆(5)、第二伸缩杆(6)、第三伸缩杆(7),所述第一伸缩杆(5)的另一端活动连接有第二伸缩杆(6),所述第一伸缩杆(5)的外壁设有第三伸缩杆(7),且通过第三伸缩杆(7)使多组第一伸缩杆(5)和第二伸缩杆(6)相互连接,所述第二伸缩杆(6)的外壁固定安装有连接块(8)。
2.根据权利要求1所述的城市道路巡检设备,其特征在于:所述巡检设备壳体(2)的外壁设有限位块(10),且限位块(10)的两端设有固定块(12)。
3.根据权利要求2所述的城市道路巡检设备,其特征在于:所述限位块(10)的内壁设有多组孔洞(11),且固定块(12)位于孔洞(11)的内壁。
4.根据权利要求1所述的城市道路巡检设备,其特征在于:所述巡检设备壳体(2)的一侧活动连接有磁块(13),且磁块(13)呈球状。
5.根据权利要求2所述的城市道路巡检设备,其特征在于:所述限位块(10)位于固定块(12)的底部,且限位块(10)为皮革拉手,以pvc和pu皮革的材质为主。
6.根据权利要求1所述的城市道路巡检设备,其特征在于:所述连接块(8)的底部活动安装有多组万向轮(9),且多组万向轮(9)水平设置。
技术总结
本技术公开了一种城市道路巡检设备,涉及道路巡检设备技术领域,包括巡检设备壳体,所述巡检设备壳体活动安装在护栏的顶部,且其的底部开设有凹槽,所述凹槽的内壁活动安装有伸缩组件,所述第一伸缩杆的另一端活动连接有第二伸缩杆,所述第一伸缩杆的外壁设有第三伸缩杆,且通过第三伸缩杆使多组第一伸缩杆和第二伸缩杆相互连接,所述第二伸缩杆的外壁固定安装有连接块。本技术解决了在每次执行道路巡检工作时,还需工作人员从车内抱出设备,然后再把机器放入护栏上端的问题,提高了工作效率,通过磁块的设置,使得工作人员可快速把机器人放入护栏上,且巡检机器人在工作过程中遇到颠簸时,会减少晃动,提高了与护栏的贴合度。
技术研发人员:刘沪,鹿浩,范甄贞
受保护的技术使用者:江苏必安仕安防科技有限公司
技术研发日:20230221
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!