高空作业平台的运输设备的制作方法
本技术属于用于架设或装配桥梁的,尤其涉及一种盖梁施工平台的运输方法及运输设备。
背景技术:
1、现有盖梁施工方式比较原始,主要有落地式支架施工、抱箍式支架施工和预埋件/钢棒式支架施工,均由人工配合工程机械完成作业,作业方式比较原始落后,存在较大的安全隐患,工期受天气影响较大,现场制作的产品质量参差不齐,随着劳动工人年龄增大,劳动力缺失问题日益严重。
2、为了解决上述问题,文献号为cn115652809a的专利申请中用于架设横梁的施工设备,在桥墩的上端与地面之间运送横梁和机械抱箍,包含多组升降子系统,将所述横梁和机械抱箍载于所述升降子系统,在所述升降子系统上升或下降的同时升在桥墩的上端与地面之间运送横梁和机械抱箍。
3、这种技术方案中,一方面,刚性链作为实现顶升的执行装置,承受力大,运行稳定需要更精准的控制;另一方面由于需要承载盖梁施工平台,对自动抱箍的锁紧力要求高,因此使用功耗及设备成本较高。
技术实现思路
1、针对现有技术的不足,本实用新型提供一种盖梁施工平台的运输方法及运输设备,能够降低电动抱箍和顶升执行装置的使用要求,从而降低了使用功耗及设备成本,运行也更加稳定。
2、本实用新型是通过以下技术方案实现的发明目的。
3、高空作业平台的运输设备,包含依附桥墩升降的爬升装备,所述爬升装备包含上方的自动抱箍、下方的自动抱箍和执行装置:
4、所述自动抱箍,若干子瓣连接成环状的所述自动抱箍,通过所述子瓣互相聚拢或分离实现所述自动抱箍抱紧或松开所述桥墩;
5、所述执行装置,用于连接两个所述自动抱箍,所述执行装置输出直线运动拉近或推远两个所述自动抱箍之间的距离;
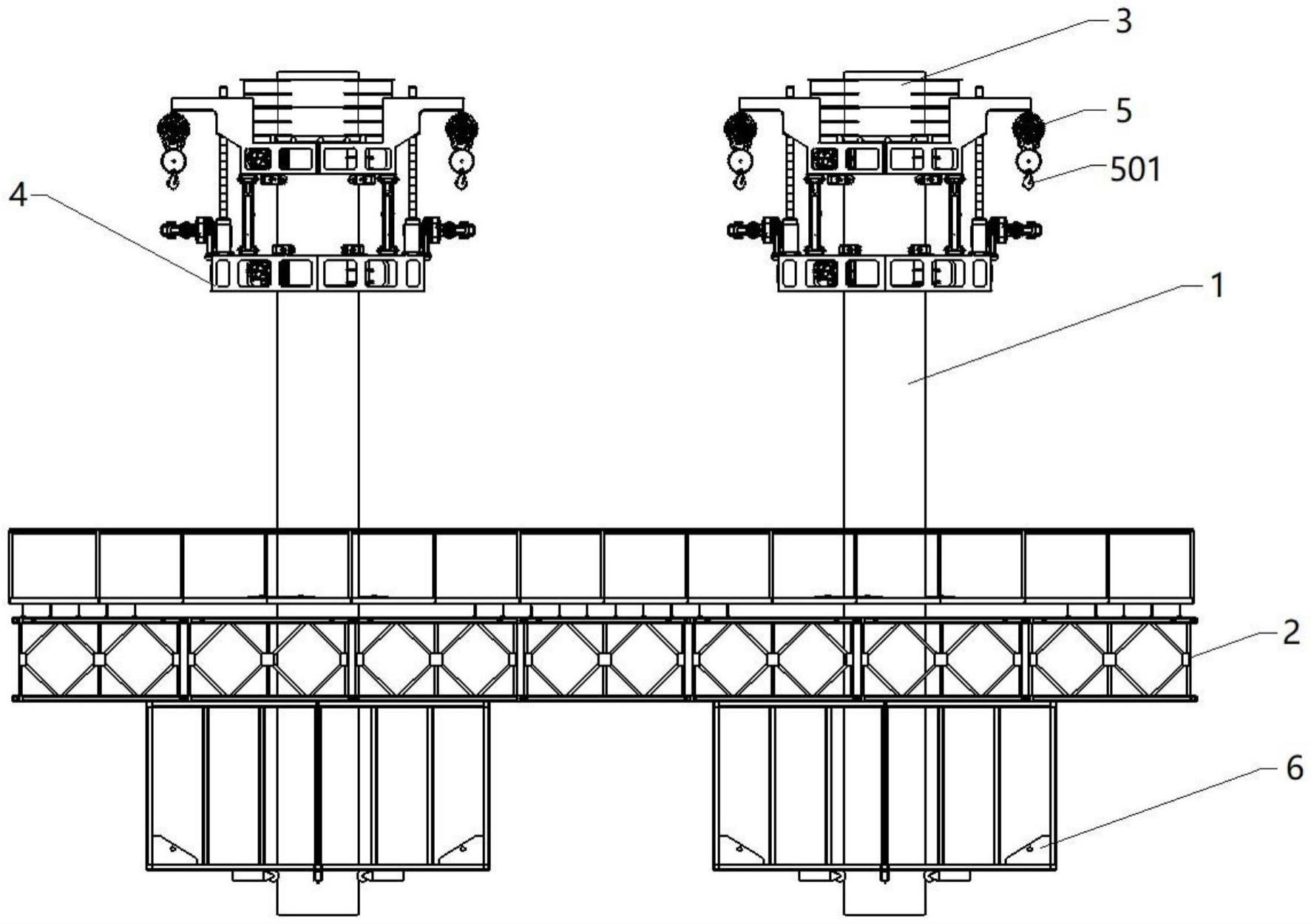
6、所述运输设备还包含提升设备和吊篮;
7、所述提升设备,安装于上方的或下方的所述自动抱箍,用于放出或回收吊装线缆提升或下放所述吊篮;
8、所述吊篮,套在所述爬升装备外;
9、其中,在高空支撑所述高空作业平台的机械抱箍置于上方的所述自动抱箍上;所述高空作业平台置于所述吊篮上。
10、在一种实施方式中,所述吊篮的底部具有设有桥墩可以穿过的通孔。
11、在一种实施方式中,所述吊篮的底部安装导向轮,所述吊篮沿所述桥墩升降时,所述导向轮在所述桥墩外周面上滚动。
12、在一种实施方式中,所述吊装线缆连接在所述吊篮的底部。
13、在一种实施方式中,所述运输设备,还包含:
14、旋转单元,置于上方的所述自动抱箍上,用于带动所述机械抱箍绕所述桥墩转动。
15、在一种实施方式中,所述旋转单元包含:
16、承载盘,设有桥墩可以穿过的通孔;
17、若干滚轮,安装在承载盘下;
18、所述机械抱箍置于所述承载盘上,所述滚轮落于上方的所述自动抱箍。
19、在一种实施方式中,所述运输设备还包含:
20、高度调节单元,置于所述机械抱箍的耳部上,用于调整所述高空作业平台的倾斜角度。
21、在一种实施方式中,所述高度调节单元,包含:
22、螺杆;
23、2个横向滑块,所述横向滑块的一侧的上方具有斜面,2个所述横向滑块以斜面相对方向的穿在所述螺杆上;
24、竖向滑块,所述竖向滑块的两侧的下方均具有斜面,所述竖向滑块从上方插在2个所述横向滑块之间,所述横向滑块的斜面与所述竖向滑块的斜面形成滑动配合;
25、通过改变2个所述横向滑块的距离调节所述纵向滑块在竖直方向的高度。
26、在一种实施方式中,所述高度调节单元,还包含:
27、2枚螺母,所述螺母与所述螺杆螺纹连接,通过拧动所述螺母改变所述横向滑块在所述螺杆上的位置。
28、在一种实施方式中,所述螺杆两端的螺纹方向相反,所述横向滑块具有与所述螺杆配合的螺纹孔,通过拧动所述螺杆改变所述横向滑块在所述螺杆上的位置。
29、本申请提供的高空作业平台的运输设备,包含依附桥墩升降的爬升装备、提升设备和吊篮;所述提升设备,安装于上方的或下方的所述自动抱箍,用于放出或回收吊装线缆提升或下放所述吊篮;所述吊篮,套在所述爬升装备外;其中,在高空支撑所述高空作业平台的机械抱箍置于上方的所述自动抱箍上;所述高空作业平台置于所述吊篮上。通过本申请提供的高空作业平台的运输设备在运输高空作业平台的过程中,爬升装备在爬升或下降的过程中爬升装备无需承受高空作业平台,因此负载较小,降低了爬升装备中的电动抱箍和顶升的执行装置的使用要求,从而降低了使用功耗及设备成本。同时,负载越小,爬升装备运行越稳定。
技术特征:
1.高空作业平台的运输设备,包含依附桥墩升降的爬升装备,其特征在于,所述爬升装备包含上方的自动抱箍、下方的自动抱箍和执行装置:
2.根据权利要求1所述的运输设备,其特征在于,所述吊篮的底部具有设有桥墩可以穿过的通孔。
3.根据权利要求1所述的运输设备,其特征在于,所述吊篮的底部安装导向轮,所述吊篮沿所述桥墩升降时,所述导向轮在所述桥墩外周面上滚动。
4.根据权利要求1所述的运输设备,其特征在于,所述吊装线缆连接在所述吊篮的底部。
5.根据权利要求1所述的运输设备,其特征在于,还包含:
6.根据权利要求5所述的运输设备,其特征在于,所述旋转单元包含:
7.根据权利要求1所述的运输设备,其特征在于,还包含:
8.根据权利要求7所述的运输设备,其特征在于,所述高度调节单元,包含:
9.根据权利要求8所述的运输设备,其特征在于,所述高度调节单元,还包含:
10.根据权利要求8所述的运输设备,其特征在于,所述螺杆两端的螺纹方向相反,所述横向滑块具有与所述螺杆配合的螺纹孔,通过拧动所述螺杆改变所述横向滑块在所述螺杆上的位置。
技术总结
本申请提供的高空作业平台的运输设备,包含依附桥墩升降的爬升装备、提升设备和吊篮;所述提升设备,安装于上方的或下方的所述自动抱箍,用于放出或回收吊装线缆提升或下放所述吊篮;所述吊篮,套在所述爬升装备外;其中,在高空支撑所述高空作业平台的机械抱箍置于上方的所述自动抱箍上;所述高空作业平台置于所述吊篮上。通过本申请提供的高空作业平台的运输设备在运输高空作业平台的过程中,爬升装备在爬升或下降的过程中爬升装备无需承受高空作业平台,因此负载较小,降低了爬升装备中的电动抱箍和顶升的执行装置的使用要求,从而降低了使用功耗及设备成本。同时,负载越小,爬升装备运行越稳定。
技术研发人员:朱成,何云彬,龚智,杨飚,熊杰
受保护的技术使用者:广东云成智能装备有限公司
技术研发日:20230630
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!