模块化可连续架设吊桥的支撑腿结构的制作方法
本技术涉及车载机械化桥,尤其涉及一种模块化可连续架设吊桥的支撑腿结构。
背景技术:
1、我国自然灾害等突发事件频发,在抢险救灾过程中,快速抢通灾区道路,及时输送救援物资是其中的关键环节,在抢通受损道路、桥梁的诸多手段中,机械化桥是应急救灾中最常用的桥梁,主要是能够快速架设在没有固定式桥梁的河流、沟壑等位置作为临时桥梁使用,因此机械化桥效率最高,速度最快的手段。
2、目前的机械化桥基本上都是采用载重卡车等能够运输较重货物的汽车来运输。在运输时折叠在汽车车体上,在使用时从车体上展开,架设在河流或者、沟壑之上,然后车辆能够与机械化桥的本体脱离。但是目前的机械化桥普遍承载能力低,想要加大承载能力就需要增加桥体厚度,从而导致运输难度与运输成本的增加。另外,现有的机械化桥跨度范围固定,使用范围受限,无法满足救援救灾以及战时的所有应用场景。
3、吊桥因斜拉索可提供多点弹性支承,使桥面板弯矩、挠度明显减小,跨越能力大大提高,同时在同样承载能力下,吊桥可有效减轻桥面板自重。采用机械化吊桥则能解决上述难题,但是机械化吊桥在架设时,其稳定性主要靠支撑腿决定。尤其是连续架设吊桥时,其支腿在车辆行进方向受的冲击力很大,因此,有必要设计一种适用于机械化吊桥的支撑腿,以使机械化吊桥在架设时更稳定可靠。
技术实现思路
1、本实用新型提供了一种模块化可连续架设吊桥的支撑腿结构,具有提升载重量并且可以增大吊桥整体稳定性的效果。具体技术方案如下:
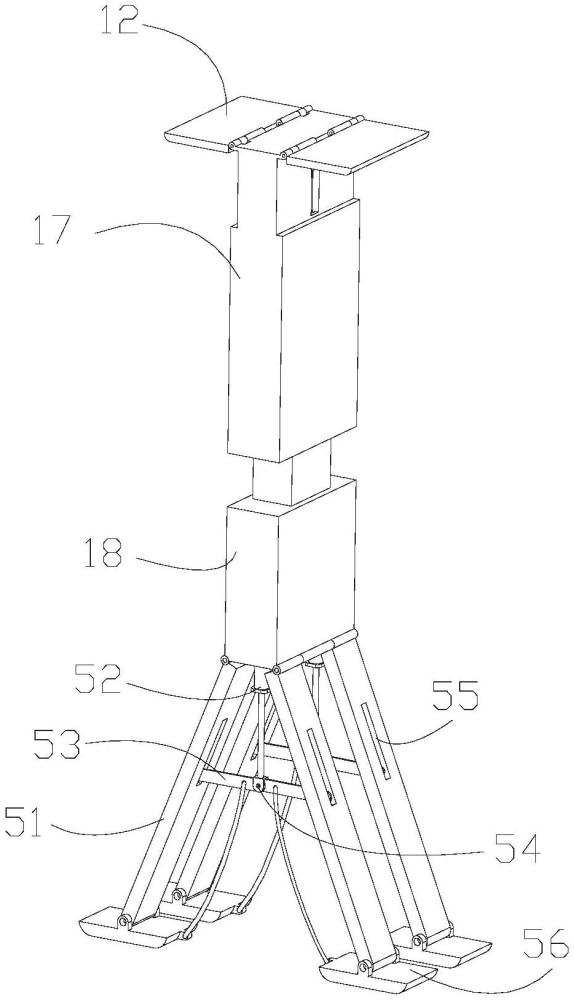
2、一种模块化可连续架设吊桥的支撑腿结构,吊桥包括吊桥本体,支撑腿铰接设置在吊桥本体下方,其中,支撑腿的上方在吊桥本体的长度方向上的两侧铰接有两个第一支撑板,两个第一支撑板与第一支撑板驱动组件相连,第一支撑板驱动组件可驱动第一支撑板在收纳状态和支撑状态之间切换;支撑腿包括上支撑腿和下支撑腿,下支撑腿远离端部上支腿的一端设置有叉脚组件,叉脚组件包括两个叉脚,两个叉脚与下支撑腿相铰接,两个叉脚可叉开,以在吊桥本体的长度方向形成三角形支撑。
3、进一步,上支撑腿和下支撑腿通过支撑腿伸缩组件相连,支撑腿伸缩组件可调节支撑腿和下支撑腿之间的距离,以对吊桥形成支撑。
4、进一步,两个叉脚与叉脚驱动组件相连,叉脚驱动组件可驱动叉脚在收纳状态和支撑状态之间切换。
5、进一步,叉脚驱动组件包括叉脚驱动油缸、叉脚驱动连杆以及叉脚驱动连接块,叉脚驱动油缸固定设置在下支撑腿内部,叉脚驱动油缸的输出轴与叉脚驱动连接块相连,叉脚驱动连接块与两个叉脚驱动连杆相铰接,两个叉脚驱动连杆分别与叉脚相铰接,叉脚驱动油缸的伸缩即可驱动叉脚在收纳状态和支撑状态之间切换。
6、进一步,叉脚靠近上部的中间位置处设置有叉脚驱动槽,叉脚驱动槽内设置有叉脚驱动柱,叉脚驱动连杆可与叉脚驱动柱相铰接,以实现叉脚驱动连杆与叉脚的连接。
7、进一步,叉脚与下支撑腿相铰接的位置处设置有叉脚限位组件,叉脚限位组件可对支撑状态下的叉脚进行限位。
8、进一步,叉脚限位组件包括相连的叉脚限位块和叉脚限位油缸,下支撑腿与叉脚相铰接的位置处的端面设置有限位腔,叉脚限位油缸固定设置在限位腔内,叉脚限位油缸的输出轴的端部与叉脚限位块相连,叉脚限位油缸通过输出轴的伸缩可驱动叉脚限位块在限位腔内伸出或缩回。
9、进一步,叉脚组件为两组,分别设置在下支撑腿宽度方向的两侧。
10、进一步,第一支撑板驱动组件包括第一支撑板驱动油缸、第一支撑板驱动连杆以及第一支撑板驱动连接块,第一支撑板驱动油缸固定设置在支撑腿内部,第一支撑板驱动油缸的输出轴与第一支撑板驱动连接块相连,第一支撑板驱动连接块相连的两侧分别与一个第一支撑板驱动连杆相铰接,两个第一支撑板驱动连杆分别与第一支撑板相铰接,第一支撑板驱动油缸的伸缩即可驱动第一支撑板在收纳状态和支撑状态之间切换。
11、进一步,支撑腿上设置有第一支撑板容纳槽,第一支撑板可容纳至第一支撑板容纳槽内。
12、本实用新型结构设计巧妙,自动化程度高,通过铰接的方式连接在吊桥本体的下方,既可以实现对吊桥本体的支撑,又能与吊桥本体的下表面相贴合,方便收纳与运输;通过设置伸缩组件,可适应不同深度的河流或者沟壑,适应性强;另外,通过在支撑腿的上设置可翻转打开的支撑板,在提高了支撑腿的支撑能力的同时,还方便了支撑腿的收纳;最后,通过设置叉脚组件,在吊桥本体的长度方向形成三角形支撑,提高了吊桥在车辆行进方向的抗冲击能力。
13、上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,而可依照说明书的内容予以实施,并且为了让本实用新型的上述和其它目的、特征和优点能够更明显易懂,以下特举本实用新型的具体实施方式。
技术特征:
1.一种模块化可连续架设吊桥的支撑腿结构,吊桥包括吊桥本体,支撑腿铰接设置在吊桥本体下方,其特征在于,支撑腿的上方在吊桥本体的长度方向上的两侧铰接有两个第一支撑板,两个第一支撑板与第一支撑板驱动组件相连,第一支撑板驱动组件可驱动第一支撑板在收纳状态和支撑状态之间切换;支撑腿包括上支撑腿和下支撑腿,端部下支腿远离端部上支腿的一端设置有叉脚组件,叉脚组件包括两个叉脚,两个叉脚与端部下支腿相铰接,两个叉脚可叉开,以在吊桥本体的长度方向形成三角形支撑。
2.如权利要求1所述的模块化可连续架设吊桥的支撑腿结构,其特征在于,上支撑腿和下支撑腿通过支撑腿伸缩组件相连,支撑腿伸缩组件可调节支撑腿和下支撑腿之间的距离,以对吊桥形成支撑。
3.如权利要求1所述的模块化可连续架设吊桥的支撑腿结构,其特征在于,两个叉脚与叉脚驱动组件相连,叉脚驱动组件可驱动叉脚在收纳状态和支撑状态之间切换。
4.如权利要求3所述的模块化可连续架设吊桥的支撑腿结构,其特征在于,叉脚驱动组件包括叉脚驱动油缸、叉脚驱动连杆以及叉脚驱动连接块,叉脚驱动油缸固定设置在下支撑腿内部,叉脚驱动油缸的输出轴与叉脚驱动连接块相连,叉脚驱动连接块与两个叉脚驱动连杆相铰接,两个叉脚驱动连杆分别与叉脚相铰接,叉脚驱动油缸的伸缩即可驱动叉脚在收纳状态和支撑状态之间切换。
5.如权利要求4所述的模块化可连续架设吊桥的支撑腿结构,其特征在于,叉脚靠近上部的中间位置处设置有叉脚驱动槽,叉脚驱动槽内设置有叉脚驱动柱,叉脚驱动连杆可与叉脚驱动柱相铰接,以实现叉脚驱动连杆与叉脚的连接。
6.如权利要求1所述的模块化可连续架设吊桥的支撑腿结构,其特征在于,叉脚与下支撑腿相铰接的位置处设置有叉脚限位组件,叉脚限位组件可对支撑状态下的叉脚进行限位。
7.如权利要求6所述的模块化可连续架设吊桥的支撑腿结构,其特征在于,叉脚限位组件包括相连的叉脚限位块和叉脚限位油缸,下支撑腿与叉脚相铰接的位置处的端面设置有限位腔,叉脚限位油缸固定设置在限位腔内,叉脚限位油缸的输出轴的端部与叉脚限位块相连,叉脚限位油缸通过输出轴的伸缩可驱动叉脚限位块在限位腔内伸出或缩回。
8.如权利要求7所述的模块化可连续架设吊桥的支撑腿结构,其特征在于,叉脚组件为两组,分别设置在下支撑腿宽度方向的两侧。
9.如权利要求1所述的模块化可连续架设吊桥的支撑腿结构,其特征在于,第一支撑板驱动组件包括第一支撑板驱动油缸、第一支撑板驱动连杆以及第一支撑板驱动连接块,第一支撑板驱动油缸固定设置在支撑腿内部,第一支撑板驱动油缸的输出轴与第一支撑板驱动连接块相连,第一支撑板驱动连接块相连的两侧分别与一个第一支撑板驱动连杆相铰接,两个第一支撑板驱动连杆分别与第一支撑板相铰接,第一支撑板驱动油缸的伸缩即可驱动第一支撑板在收纳状态和支撑状态之间切换。
10.如权利要求9所述的模块化可连续架设吊桥的支撑腿结构,其特征在于,支撑腿上设置有第一支撑板容纳槽,第一支撑板可容纳至第一支撑板容纳槽内。
技术总结
本技术公开了一种模块化可连续架设吊桥的支撑腿结构,支撑腿的上方在吊桥本体的长度方向上的两侧铰接有两个第一支撑板,两个第一支撑板与第一支撑板驱动组件相连,第一支撑板驱动组件可驱动第一支撑板在收纳状态和支撑状态之间切换;支撑腿包括上支撑腿和下支撑腿,端部下支腿远离端部上支腿的一端设置有叉脚组件,叉脚组件包括两个叉脚,两个叉脚与端部下支腿相铰接,两个叉脚可叉开,以在吊桥本体的长度方向形成三角形支撑。本技术结构设计巧妙,自动化程度高,通过在支撑腿的上设置可翻转打开的支撑板,提高了支撑腿的支撑能力;通过设置叉脚组件,在吊桥本体的长度方向形成三角形支撑,提高了吊桥在车辆行进方向的抗冲击能力。
技术研发人员:付强,任洪鹏,曹兵,吴昊,李猛,穆梦斐,罗会军,陈玲侠
受保护的技术使用者:中国人民解放军火箭军工程设计研究院
技术研发日:20231107
技术公布日:2024/6/20
- 还没有人留言评论。精彩留言会获得点赞!