一种移动式变刚度TMD拉索振动控制装置及控制系统
本发明属于桥梁风工程拉索振动抑制,特别是涉及一种移动式变刚度tmd拉索振动控制装置及控制系统。
背景技术:
1、大跨度桥梁跨度大,通过能力强,而拉索稳定性对于大跨度桥梁的稳定性有着重大影响。不论是大跨度斜拉索桥还是悬索桥,拉索的长细比都较大,容易在垂直于来流风向上发生涡激振动。这种在常遇风速下就能发生的持续反复的振动,发生概率高。长期反复的振动容易引起拉索疲劳破坏、锚固件和拉索座上的构件松动及疲劳破坏等。这些都是大跨度桥梁正常运行的巨大安全隐患。
2、目前常用的解决拉索涡激振动问题常用方法包括:1)在拉索上布置扰流装置如被动吸吹气套环,这种方法可以改变拉索表面的绕流场特性,进而达到抑制涡激振动的目的;2)对薄弱板件增加补强措施,能缓解涡激振动造成的金属构件疲劳破坏,但人力物力消耗巨大,不能从根本上解决涡激振动问题;3)布置调谐质量阻尼器,但是只简单的在某些位置布置tmd(tuned mass damper,调谐质量阻尼器)的控制效果可能不够理想,并且性价比不高。
3、在上述方法中,增加扰流装置和安放阻尼器是较为简便易行的解决方案,现有相关扰流装置产品多为金属制品,在钢管塔中大量安装会增加塔体的承载,金属扰流装置加工制造成本高,工艺复杂,通用性和适应性差;扰流装置还需要通过大量的实验来确定其控制效果。传统环形及螺旋形tmd一般布置在低阶模态的极值点处,如一阶模态布置在拉索中心线长度方向上的1/2处,二阶模态布置在1/4和3/4处,依次类推,将不同低阶模态的所有振幅极值点处均布置tmd。这种方法不具有针对性,在某些情况下不仅控制效果不理想而且成本较高。
4、综上所述,针对传统tmd控制方法对拉索振动适用性不强,成本较高的问题。亟需开发一种新型的移动式变刚度tmd拉索振动控制系统,提高现有拉索涡激振动的控制效率,以提高拉索结构的稳定性和安全性。
技术实现思路
1、有鉴于此,为了解决现有拉索减振成本高、适用性不强,达不到理想效果、安装受限制的技术问题。本发明提出一种移动式变刚度tmd拉索振动控制装置及控制系统,能够根据实时振动响应自动调节tmd刚度。
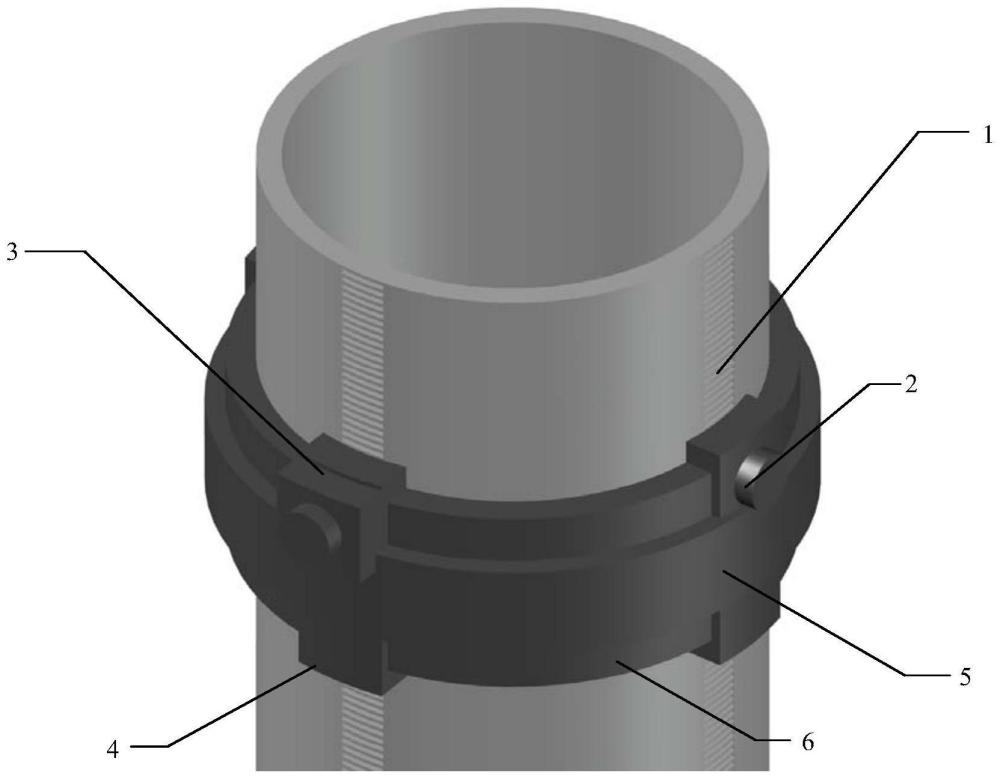
2、为实现上述目的,本发明采用以下技术方案:一种移动式变刚度tmd拉索振动控制系统,所述移动式变刚度tmd拉索振动控制系统套固在拉索外周,所述移动式变刚度tmd拉索振动控制系统包括本体、两个加速度传感器、两个动力装置、四个自锁装置、变刚度tmd和控制系统集成装置,所述两个动力装置位于本体内侧,且与控制系统集成装置相连,两个加速度传感器位于本体外侧且与动力装置相连,四个自锁装置位于本体内侧,且与控制系统集成装置相连,所述本体内部安装有变刚度tmd,据加速度传感器监测的实时数据确定拉索的振动模态,然后移动移动式变刚度tmd拉索振动控制系统的位置。
3、更进一步地,当需要控制单半波时,移动式变刚度tmd拉索振动控制系统主动移动到拉索的1/2长度位置处。
4、更进一步地,当需要控制双半波时,移动式变刚度tmd拉索振动控制系统主动移动到拉索的1/4或3/4长度位置处。
5、更进一步地,当需要控制三半波时,移动式变刚度tmd拉索振动控制系统主动移动到拉索的1/6或5/6长度位置处。
6、更进一步地,所述拉索上设置有拉索卡齿,所述移动式变刚度tmd拉索振动控制系统套固在拉索卡齿上。
7、更进一步地,所述本体、动力装置和自锁装置均采用铝合金材质。
8、更进一步地,所述自锁装置包括齿轮,所述移动式变刚度tmd拉索振动控制装置通过动力装置上的齿轮滚动咬合拉索卡齿上下移动,自锁装置通过拉索卡齿1进行固定。
9、更进一步地,两个加速度传感器在垂直于拉索卡齿中心线方向上布置,并且两个加速度传感器指向方向相互垂直,监测到两个方向的实时数据后用正交分解法判断振动方向和幅值,将信号传递给控制系统集成装置进行处理。
10、更进一步地,通过实时的振动响应幅值来分段调节变刚度tmd的刚度。当振幅大于一个阈值后自动提高变刚度tmd的刚度,在提高刚度后再对振动响应进行一定时长的监测,从而判断是否需要进一步的提高变刚度tmd的刚度,当振幅减小到一个阈值后停止调节变刚度tmd的刚度。
11、与现有技术相比,本发明所述的一种移动式变刚度tmd拉索振动控制装置及控制系统的有益效果是:
12、(1)本发明通过加速度传感器实时分析拉索在风荷载扰动下自振频率可以得到实时的拉索振动模态,进而通过卡齿、动力装置、自锁装置实现不同振动模态下的阻尼器位置调节,具有很强的针对性。
13、(2)加速度传感器还可以监测拉索的振动响应幅值,通过实时的振动响应幅值来分段调节tmd刚度。当振幅大于一个阈值后自动提高阻尼器刚度,在提高刚度后再对振动响应进行一定时长的监测、从而判断是否需要进一步的提高阻尼器刚度;当振幅减小到一个阈值后停止调节tmd刚度,能够根据实时振动响应自动调节tmd刚度。
14、(3)本发明的移动式变刚度tmd拉索振动控制系统可有效提高拉索的使用安全性和稳定性,对不同环境及不同工况的拉索都具有很高的适用性。
技术特征:
1.一种移动式变刚度tmd拉索振动控制系统,其特征在于:所述移动式变刚度tmd拉索振动控制系统套固在拉索外周,所述移动式变刚度tmd拉索振动控制系统包括本体、两个加速度传感器(2)、两个动力装置(3)、四个自锁装置(4)、变刚度tmd(5)和控制系统集成装置(6),所述两个动力装置(3)位于本体内侧,且与控制系统集成装置(6)相连,两个加速度传感器(2)位于本体外侧且与动力装置(3)相连,四个自锁装置(4)位于本体内侧,且与控制系统集成装置(6)相连,所述本体内部安装有变刚度tmd(5),据加速度传感器(2)监测的实时数据确定拉索的振动模态,然后移动移动式变刚度tmd拉索振动控制系统的位置。
2.根据权利要求1所述的移动式变刚度tmd拉索振动控制系统,其特征在于:当需要控制单半波时,移动式变刚度tmd拉索振动控制系统主动移动到拉索的1/2长度位置处。
3.根据权利要求1所述的移动式变刚度tmd拉索振动控制系统,其特征在于:当需要控制双半波时,移动式变刚度tmd拉索振动控制系统主动移动到拉索的1/4或3/4长度位置处。
4.根据权利要求1所述的移动式变刚度tmd拉索振动控制系统,其特征在于:当需要控制三半波时,移动式变刚度tmd拉索振动控制系统主动移动到拉索的1/6或5/6长度位置处。
5.根据权利要求1所述的移动式变刚度tmd拉索振动控制系统,其特征在于:所述拉索上设置有拉索卡齿(1),所述移动式变刚度tmd拉索振动控制系统套固在拉索卡齿(1)上。
6.根据权利要求5所述的移动式变刚度tmd拉索振动控制系统,其特征在于:所述本体、动力装置(3)和自锁装置(4)均采用铝合金材质。
7.根据权利要求5所述的移动式变刚度tmd拉索振动控制系统,其特征在于:所述自锁装置(4)包括齿轮,所述移动式变刚度tmd拉索振动控制装置通过动力装置(3)上的齿轮滚动咬合拉索卡齿(1)上下移动,自锁装置(4)通过拉索卡齿(1)进行固定。
8.根据权利要求5所述的移动式变刚度tmd拉索振动控制系统,其特征在于:两个加速度传感器(2)在垂直于拉索卡齿(1)中心线方向上布置,并且两个加速度传感器(2)指向方向相互垂直,监测到两个方向的实时数据后用正交分解法判断振动方向和幅值,将信号传递给控制系统集成装置(6)进行处理。
9.根据权利要求1所述的移动式变刚度tmd拉索振动控制系统,其特征在于:通过实时的振动响应幅值来分段调节变刚度tmd(5)的刚度。当振幅大于一个阈值后自动提高变刚度tmd(5)的刚度,在提高刚度后再对振动响应进行一定时长的监测,从而判断是否需要进一步的提高变刚度tmd(5)的刚度,当振幅减小到一个阈值后停止调节变刚度tmd(5)的刚度。
技术总结
本发明提出了一种移动式变刚度TMD拉索振动控制装置及控制系统,属于桥梁风工程拉索振动抑制技术领域。解决了现有拉索减振成本高、适用性不强,达不到理想效果、安装受限制的技术问题。移动式变刚度TMD拉索振动控制系统套固在拉索外周,其两个动力装置位于本体内侧,且与控制系统集成装置相连,两个加速度传感器位于本体外侧且与动力装置相连,四个自锁装置位于本体内侧,且与控制系统集成装置相连,所述本体内部安装有变刚度TMD,据加速度传感器监测的实时数据确定拉索的振动模态,然后移动移动式变刚度TMD拉索振动控制系统的位置。本发明可有效提高拉索的使用安全性和稳定性,对不同环境及不同工况的拉索都具有很高的适用性。
技术研发人员:陈文礼,杨文瀚,李惠
受保护的技术使用者:哈尔滨工业大学
技术研发日:
技术公布日:2024/5/29
- 还没有人留言评论。精彩留言会获得点赞!