桥梁现浇钢筋混凝土护栏轨道移动式多头智能振捣装置的制作方法
本技术属于桥梁施工,具体是一种桥梁现浇钢筋混凝土护栏轨道移动式多头智能振捣装置。
背景技术:
1、随着国家基础建设的发展,桥梁工程中现浇钢筋混凝土护栏也越来越多,传统施工工艺中,桥梁现浇钢筋混凝土护栏浇筑一般采用人工手持式振捣棒进行振捣。
2、桥梁现浇护栏采用手持式振捣棒振捣,有以下缺点:
3、1.手持式振捣棒主要依靠工人施工经验确定,其中提升速度、振捣时间、振捣半径、插入位置等具有较大的随意性,易出现漏振、过振现象;
4、2.手持式振捣棒一般为单头,施工效率低,劳动强度大;
5、3.现浇钢筋混凝土护栏钢筋较密集,人工判断不准确,须多次调整,浪费时间;
6、4.桥梁现浇护栏属于高处临边作业、安全防护困难,施工危险性大,工人站在模板顶部进行施工,安全带悬挂无法高挂低用,且随着混凝土分层浇筑须往复行走,在行进过程中工人须频繁解除安全带进行操作,施工安全风险极高;
7、5.由于工程特点,经常需要进行夜间施工,安全风险、操作难度进一步加大。
8、因此,研究一种简便、高效、安全、自动化程度高的现浇钢筋混凝土护栏振捣装置是很有必要的。
技术实现思路
1、本实用新型为了解决传统桥梁现浇护栏人工振捣具有较大随意性、施工效率低、劳动强度大及不安全等问题,提供一种桥梁现浇钢筋混凝土护栏轨道移动式多头智能振捣装置。
2、本实用新型采取以下技术方案:一种桥梁现浇钢筋混凝土护栏轨道移动式多头智能振捣装置,包括:
3、移动架模块,所述移动架模块设置在待浇筑护栏的钢筋上;
4、卷扬转盘,所述卷扬转盘设置在移动架模块上;
5、振捣装置,所述振捣装置悬挂在卷扬转盘上。
6、在一些实施例中,移动架模块包括:
7、轨道,所述轨道设置两组;
8、门架,所述门架底部设置行走轮,通过行走轮沿轨道移动;
9、电机及智能控制器,所述电机及智能控制器驱动行走轮。
10、在一些实施例中,卷扬转盘包括:
11、减振弹簧,所述减振弹簧上端悬挂在移动架模块上;
12、转盘吊架,所述转盘吊架悬挂在减振弹簧下端;
13、转盘,所述转盘通过轴承安装在转盘吊架上,转盘由内置电机驱动。
14、在一些实施例中,振捣装置包括:
15、振捣棒,振捣棒上设置第一位置传感器;
16、振捣软管,所述振捣棒与振捣软管的一端连接,振捣软管另一端连接电机。
17、在一些实施例中,还包括定位装置、图像信息采集系统以及控制系统,所述定位装置用于确定卷扬转盘在卷扬转盘的位置,所述图像信息采集系统设置在移动架模块用于实时捕捉钢筋的位置;所述控制系统接收来图像信息采集系统中的图像信息以及定位装置中的位置信息。
18、在一些实施例中,定位装置包括:
19、滑轨,所述滑轨架设在移动架模块上;
20、滑块,所述滑块设置在滑轨上,滑块上设置第二位置传感器;
21、信号处理器,所述信号处理器接收控制系统的信号,并将信息传递给电控模块,电控模块驱动滑块移动。
22、在一些实施例中,图像信息采集系统包括:
23、摄像机,所述摄像机架设在移动架模块上;
24、图像传输装置,图像传输装置将摄像机采集的图像传给控制系统。
25、在一些实施例中,还包括照明装置,所述照明装置设置在移动架模块。
26、在一些实施例中,照明装置包括:
27、照明灯,所述照明灯通过连接杆固定在移动架模块上;
28、光敏电阻,光敏电阻通过对光线的判断,控制照明灯的开关启闭。
29、与现有技术相比,本实用新型具有以下有益效果:
30、1.通过显示屏设定振捣参数,可实现振捣频率,振捣时间,振捣棒提升速度、插入位置、振捣半径等自动控制;振捣效果好,避免人为因素影响导致过振、漏振;
31、2.通过自动振捣装置,避免人工手持振捣棒长时间高强度劳作,有效减少劳动强度;
32、3.通过多头振捣装置代替人工单头振捣装置,大大提高劳动效率。
33、4.通过显示屏设置移动参数,可实现移动门架移动自动行走。避免人工振捣在模板顶部无安全防护情况下的安全事故。
34、5.通过位置传感器、图像信息采集系统、滑块自动避让钢筋算法,定位装置对振捣棒进行自动定位。减少人为判断,多次调整,浪费时间,对振捣半径的选择、判断可做到完全符合规范要求。
35、6.照明装置通过光敏电阻,自动开关,实现夜间照明。
36、7.操作方便,只须通过设置参数,全程无需人工参入,能有效减少成本、可大规模应用,适应人口老龄化的发展。
技术特征:
1.一种桥梁现浇钢筋混凝土护栏轨道移动式多头智能振捣装置,其特征在于,包括:
2.根据权利要求1所述的桥梁现浇钢筋混凝土护栏轨道移动式多头智能振捣装置,其特征在于,所述移动架模块(1)包括:
3.根据权利要求1所述的桥梁现浇钢筋混凝土护栏轨道移动式多头智能振捣装置,其特征在于,所述卷扬转盘(2)包括:
4.根据权利要求3所述的桥梁现浇钢筋混凝土护栏轨道移动式多头智能振捣装置,其特征在于,所述振捣装置(3)包括:
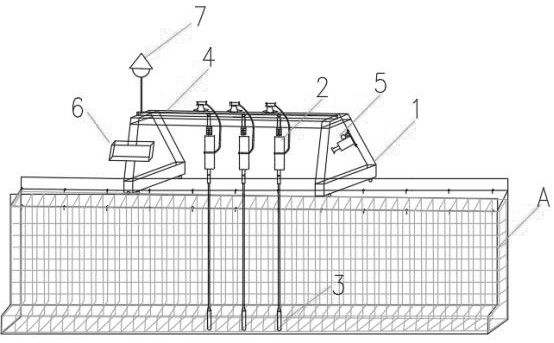
5.根据权利要求1所述的桥梁现浇钢筋混凝土护栏轨道移动式多头智能振捣装置,其特征在于,还包括定位装置(4)、图像信息采集系统(5)以及控制系统(6),所述定位装置(4)用于确定卷扬转盘(2)在卷扬转盘(2)的位置,所述图像信息采集系统(5)设置在移动架模块(1)用于实时捕捉钢筋的位置;所述控制系统(6)接收来图像信息采集系统(5)中的图像信息以及定位装置(4)中的位置信息。
6.根据权利要求5所述的桥梁现浇钢筋混凝土护栏轨道移动式多头智能振捣装置,其特征在于,所述定位装置(4)包括:
7.根据权利要求5所述的桥梁现浇钢筋混凝土护栏轨道移动式多头智能振捣装置,其特征在于,所述图像信息采集系统(5)包括:
8.根据权利要求1或5所述的桥梁现浇钢筋混凝土护栏轨道移动式多头智能振捣装置,其特征在于,还包括照明装置(7),所述照明装置(7)设置在移动架模块(1)。
9.根据权利要求8所述的桥梁现浇钢筋混凝土护栏轨道移动式多头智能振捣装置,其特征在于,所述照明装置(7)包括:
技术总结
本技术属于桥梁施工技术领域,具体是一种桥梁现浇钢筋混凝土护栏轨道移动式多头智能振捣装置。解决了传统桥梁现浇护栏人工振捣具有较大随意性、施工效率低、劳动强度大及不安全等问题,包括:移动架模块,所述移动架模块设置在待浇筑护栏的钢筋上;卷扬转盘,所述卷扬转盘设置在移动架模块上;振捣装置,所述振捣装置悬挂在卷扬转盘上。本技术可实现振捣频率,振捣时间,振捣棒提升速度、插入位置、振捣半径等自动控制;振捣效果好,避免人为因素影响导致过振、漏振。
技术研发人员:林创増,王万通,雷冬伟,左健,彭旭飞,汪永林,沈森,王祥宇,蒋相存,吕坤泽,曾锐,张宝东,高玲玲
受保护的技术使用者:中铁十二局集团第一工程有限公司
技术研发日:20240523
技术公布日:2025/4/21
- 还没有人留言评论。精彩留言会获得点赞!