一种智能老年服务机器人的制作方法
1.本发明涉及机器人领域,更具体的说是一种智能老年服务机器人。
背景技术:
2.虽然由于各种灾难和疾病造成的残障人士逐年增加,但是随着世界老龄化进程的加快,照顾老人问题即将成为一个严重的社会问题。老人的特点既要保证安逸休息,又要保证顺利出行,而且要考虑到老人的心理和情绪问题。因此,具备智能轮椅和保健床功能的智能轮椅床将是未来开发的重点对象,尤其是具备简单操作,高级智能,同时考虑老人心理和情绪问题的适合于老年人应用的高级智能轮椅床将是重点开发和扶植生产的对象。
技术实现要素:
3.本发明的目的是提供一种智能老年服务机器人,可以实现对老人进行看护。
4.本发明的目的通过以下技术方案来实现:
5.一种智能老年服务机器人,其特征在于:包括智能感知系统、运动控制与能源系统和人机接口,其中,
6.智能感知系统:包括icetek交互接口开发板、arm9开发板、凌阳开发板、液晶显示器、仿真器、视觉传感器、超声传感器,系统拟采取超声传感、视觉传感、语音传感等感知技术,超声传感主要配合视觉传感之一,进行障碍物的判断与识别(包括尺寸和距离),并制定合理的绕行路线;语音传感主要感知语音指令,并随时可根据语音指令进行中断,并配合视觉传感之二进行高级的语音理解识别研究;视觉传感之三也属于高级研究内容之一,就是轮椅接受视觉指令,进行视觉控制,同时并进行基于特定环境的视觉导航探索性研究以及远程监护功能研究;
7.运动控制与能源系统:包括语音传感器及控制芯片和步进、伺服电机及驱动控制器,控能轮椅床除了具备床的休息、辅助运动、娱乐功能外,还要具备轮椅的运动功能,如何保证轮椅的可靠、稳定运行与停止,以及动力的提供,是智能轮椅床研制的关键内容之一。智能轮椅床具备自主运动功能,需要实时根据各种传感器信息,做出运动决策,进行运动控制。轮椅床的运动范围较大,不能使用外用电源,只能根据所确定的运动范围、驱动功率使用蓄电电源;
8.人机接口:人机接口是机器人理解人的意图和外界环境,并做出决策到外界环境的传播途径,智能轮椅床人机接口包括嵌入式语音交互接口、视觉交互接口、超声传感接口等,拟在各模块分别研究实现的基础,统一成多传感交互接口控制系统,实现智能感知与决策。
9.作为本技术方案的进一步优化,本发明一种智能老年服务机器人,还包括娱乐心理安慰功能模块,智能轮椅床的主要应用对象为老年人,老年人除了日常生活外,心理心情问题也是需要考虑的重要内容。进行老年人心理需要的认真调研,在统计分析的基础上,进行功能设计,实现初期的语音模仿及娱乐安慰功能,并进行后期的多媒体式的模仿安慰功
能探索研究和技术实现,是项目解决的重要研究内容之一。
10.作为本技术方案的进一步优化,本发明一种智能老年服务机器人,还包括数据采集卡。
11.本发明一种智能老年服务机器人的有益效果为:
12.本发明一种智能老年服务机器人,语音传感主要感知语音指令,并随时可根据语音指令进行中断,并配合视觉传感之二进行高级的语音理解识别研究;视觉传感之三也属于高级研究内容之一,就是轮椅接受视觉指令,进行视觉控制,同时并进行基于特定环境的视觉导航探索性研究以及远程监护功能研究
附图说明
13.下面结合附图和具体实施方法对本发明做进一步详细的说明。
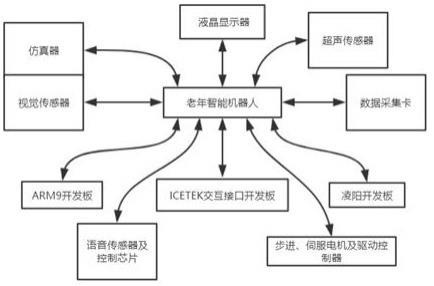
14.图1是本发明的结构流程图。
具体实施方式
15.下面结合附图对本发明作进一步详细说明。
16.具体实施方式一:
17.下面结合图1说明本实施方式,一种智能老年服务机器人,其特征在于:包括智能感知系统、运动控制与能源系统和人机接口,其中,
18.智能感知系统:包括icetek交互接口开发板、arm9开发板、凌阳开发板、液晶显示器、仿真器、视觉传感器、超声传感器,系统拟采取超声传感、视觉传感、语音传感等感知技术,超声传感主要配合视觉传感之一,进行障碍物的判断与识别(包括尺寸和距离),并制定合理的绕行路线;语音传感主要感知语音指令,并随时可根据语音指令进行中断,并配合视觉传感之二进行高级的语音理解识别研究;视觉传感之三也属于高级研究内容之一,就是轮椅接受视觉指令,进行视觉控制,同时并进行基于特定环境的视觉导航探索性研究以及远程监护功能研究;
19.运动控制与能源系统:包括语音传感器及控制芯片和步进、伺服电机及驱动控制器,控能轮椅床除了具备床的休息、辅助运动、娱乐功能外,还要具备轮椅的运动功能,如何保证轮椅的可靠、稳定运行与停止,以及动力的提供,是智能轮椅床研制的关键内容之一。智能轮椅床具备自主运动功能,需要实时根据各种传感器信息,做出运动决策,进行运动控制。轮椅床的运动范围较大,不能使用外用电源,只能根据所确定的运动范围、驱动功率使用蓄电电源;
20.人机接口:人机接口是机器人理解人的意图和外界环境,并做出决策到外界环境的传播途径,智能轮椅床人机接口包括嵌入式语音交互接口、视觉交互接口、超声传感接口等,拟在各模块分别研究实现的基础,统一成多传感交互接口控制系统,实现智能感知与决策。
21.进一步的,还包括娱乐心理安慰功能模块,智能轮椅床的主要应用对象为老年人,老年人除了日常生活外,心理心情问题也是需要考虑的重要内容。进行老年人心理需要的认真调研,在统计分析的基础上,进行功能设计,实现初期的语音模仿及娱乐安慰功能,并进行后期的多媒体式的模仿安慰功能探索研究和技术实现,是项目解决的重要研究内容之
一。
22.进一步的,还包括数据采集卡。
23.当然,上述说明并非对本发明的限制,本发明也不仅限于上述举例,本技术领域的普通技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也属于本发明的保护范围。
技术特征:
1.一种智能老年服务机器人,其特征在于:包括智能感知系统、运动控制与能源系统和人机接口,其中,智能感知系统:包括icetek交互接口开发板、arm9开发板、凌阳开发板、液晶显示器、仿真器、视觉传感器、超声传感器,系统拟采取超声传感、视觉传感、语音传感等感知技术,超声传感主要配合视觉传感之一,进行障碍物的判断与识别(包括尺寸和距离),并制定合理的绕行路线;语音传感主要感知语音指令,并随时可根据语音指令进行中断,并配合视觉传感之二进行高级的语音理解识别研究;视觉传感之三也属于高级研究内容之一,就是轮椅接受视觉指令,进行视觉控制,同时并进行基于特定环境的视觉导航探索性研究以及远程监护功能研究;运动控制与能源系统:包括语音传感器及控制芯片和步进、伺服电机及驱动控制器,控能轮椅床除了具备床的休息、辅助运动、娱乐功能外,还要具备轮椅的运动功能,如何保证轮椅的可靠、稳定运行与停止,以及动力的提供,是智能轮椅床研制的关键内容之一。智能轮椅床具备自主运动功能,需要实时根据各种传感器信息,做出运动决策,进行运动控制。轮椅床的运动范围较大,不能使用外用电源,只能根据所确定的运动范围、驱动功率使用蓄电电源;人机接口:人机接口是机器人理解人的意图和外界环境,并做出决策到外界环境的传播途径,智能轮椅床人机接口包括嵌入式语音交互接口、视觉交互接口、超声传感接口等,拟在各模块分别研究实现的基础,统一成多传感交互接口控制系统,实现智能感知与决策。2.根据权利要求1所述的一种智能老年服务机器人,其特征在于:还包括娱乐心理安慰功能模块,智能轮椅床的主要应用对象为老年人,老年人除了日常生活外,心理心情问题也是需要考虑的重要内容。进行老年人心理需要的认真调研,在统计分析的基础上,进行功能设计,实现初期的语音模仿及娱乐安慰功能,并进行后期的多媒体式的模仿安慰功能探索研究和技术实现,是项目解决的重要研究内容之一。3.根据权利要求1所述的一种智能老年服务机器人,其特征在于:还包括数据采集卡。
技术总结
本发明公开了一种智能老年服务机器人,还包括娱乐心理安慰功能模块,智能轮椅床的主要应用对象为老年人,老年人除了日常生活外,心理心情问题也是需要考虑的重要内容。进行老年人心理需要的认真调研,在统计分析的基础上,进行功能设计,实现初期的语音模仿及娱乐安慰功能,并进行后期的多媒体式的模仿安慰功能探索研究和技术实现,是项目解决的重要研究内容之一。之一。
技术研发人员:吕淑华
受保护的技术使用者:哈尔滨新区婉菁集群科技集团有限公司
技术研发日:2020.10.28
技术公布日:2022/5/16
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1