一种夹取式机械臂
1.本实用新型涉及机械手臂技术领域,尤其涉及一种夹取式机械臂。
背景技术:
2.机械手臂是机械人技术领域中得到最广泛实际应用的自动化机械装置,在工业制造、医学治疗、军事、半导体制造以及太空探索等领域都能见到它的身影。尽管它们的形态各有不同,但它们都有一个共同的特点,就是能够接受指令,精确地定位到三维或二维空间上的某一点进行作业。
3.现有的夹取式机械臂在进行夹取的过程中,被夹持的对象可能为不规则物品,导致夹取式机械臂与其表面之间的接触点较少,从而对其夹持效果差,工作过程中产生的移动或是转动都会让物品掉落,造成损失。
技术实现要素:
4.本实用新型的目的是为了解决现有技术中以下缺点,被夹持的对象可能为不规则物品,导致夹取式机械臂与其表面之间的接触点较少,从而对其夹持效果差,工作过程中产生的移动或是转动都会让物品掉落,造成损失,而提出的一种夹取式机械臂。
5.为了实现上述目的,本实用新型采用了如下技术方案:
6.一种夹取式机械臂,包括安装块,所述安装块下表面开设有挤压槽,所述挤压槽内滑动密封安装有挤压板,所述挤压板下表面固定安装有抵杆,所述挤压槽槽底垂直固定安装有导杆,所述挤压板滑动密封套设在导杆上,所述导杆远离挤压槽的一端固定套接有限位环,所述导杆上固定套设有弹簧,所述弹簧的两端分别与挤压槽槽底和挤压板上表面固定连接,所述安装块下表面滑动安装有两根夹持爪,多根所述夹持爪相互靠近的一面均固定安装有膨胀型装置,所述膨胀型装置通过连接部件与挤压槽槽底处侧壁相连通。
7.优选的,所述连接部件包括导气管,所述导气管一端与挤压槽槽底处侧壁相连通,所述膨胀型装置的顶端固定安装有与其内部相连通的波纹管,所述导气管远离挤压槽的一端密封插设在波纹管内。
8.优选的,所述抵杆远离挤压板的一端固定安装有抵板。
9.优选的,所述抵板下表面粘接有保护层,所述保护层的材质为橡胶。
10.优选的,所述导杆的数量为多根且垂直对称分布在挤压槽内。
11.优选的,所述膨胀型装置为气囊,多个所述气囊相互靠近的一面均为弹性材质。
12.与现有技术相比,本实用新型的有益效果是:
13.当工作人员操控夹持爪对物品进行夹取工作的时候,首先将夹持爪移动至该物品的上方,然后控制夹持爪下移,此时物品会与抵杆接触,从而挤压抵杆,抵杆便会带着挤压板向挤压槽内移动,此时挤压槽内的体积减小,原本在挤压槽内的气体会通过连接部件进入膨胀型装置的内部,从而膨胀型装置在此时发生膨胀,直到多个膨胀型装置相互靠近的一面与物品的表面接触并控制夹持爪将物品夹紧过后,此时对该物品的夹取工作就完成
了。此新型与传统的相比,当夹取对象为不规则物体的时候,膨胀型装置的侧壁也会与该物体的表面紧密贴合,保证夹取工作的稳定性。
附图说明
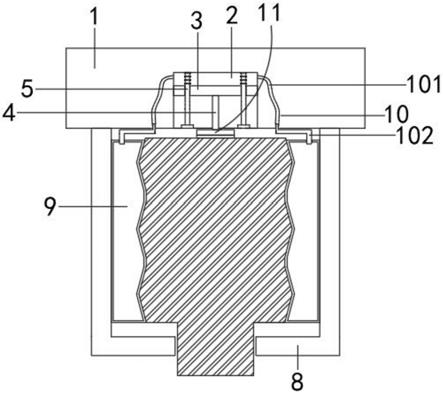
14.图1为本实用新型提出的一种夹取式机械臂的正面结构示意图;
15.图2为本实用新型提出的一种夹取式机械臂夹持不规则物品时的正面结构示意图;
16.图3为图1中a处结构放大示意图。
17.图中:1安装块、2挤压槽、3挤压板、4抵杆、5导杆、6限位环、7弹簧、8夹持爪、9膨胀型装置、10连接部件、101导气管、102波纹管、11抵板、12保护层。
具体实施方式
18.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
19.本实用新型中所引用的如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本实用新型可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本实用新型可实施的范畴。
20.参照图1
‑
3,一种夹取式机械臂,包括安装块1,安装块1下表面开设有挤压槽2,挤压槽2内滑动密封安装有挤压板3,挤压板3下表面固定安装有抵杆4,挤压槽2槽底垂直固定安装有导杆5,挤压板3滑动密封套设在导杆5上,导杆5远离挤压槽2的一端固定套接有限位环6,导杆5上固定套设有弹簧7,弹簧7的两端分别与挤压槽2槽底和挤压板3上表面固定连接,安装块1下表面滑动安装有两根夹持爪8,多根夹持爪8相互靠近的一面均固定安装有膨胀型装置9,膨胀型装置9通过连接部件10与挤压槽2槽底处侧壁相连通。
21.应用上述技术方案的实施例中,当工作人员操控夹持爪8对物品进行夹取工作的时候,首先将夹持爪8移动至该物品的上方,然后控制夹持爪8下移,此时物品会与抵杆4接触,从而慢慢挤压抵杆4,抵杆4便会带着与其顶端固定连接的挤压板3向挤压槽2内移动,此时挤压槽2内的体积减小,因为挤压板3滑动密封安装在挤压槽2内,所以原本在挤压槽2内的气体会通过连接部件10进入膨胀型装置9的内部,从而膨胀型装置9在此时发生膨胀,直到多个膨胀型装置9相互靠近的一面与物品的表面接触并控制夹持爪8将物品夹紧过后,此时对该物品的夹取工作就完成了。
22.本实施例中优选的技术方案,连接部件10包括导气管101,导气管101一端与挤压槽2槽底处侧壁相连通,膨胀型装置9的顶端固定安装有与其内部相连通的波纹管102,导气管101远离挤压槽2的一端密封插设在波纹管102内。挤压板3上移的时候,挤压槽2内的体积变小,原有的气体会通过导气管101和波纹管102进入膨胀型装置9内使其发生膨胀,因为夹持爪8在进行夹取的过程中会移动,从而具有伸缩性的波纹管102避免了夹持爪8在移动的过程中将连接部件10扯断分开无法工作的现象。
23.本实施例中优选的技术方案,抵杆4远离挤压板3的一端固定安装有抵板11。抵板11可以增加待夹取物品与抵杆4底端之间的接触面积,防止待夹取物品较小时,触碰不到抵
杆4的底端。
24.本实施例中优选的技术方案,抵板11下表面粘接有保护层12,保护层12的材质为橡胶。橡胶具有弹性和粘性,从而可以避免物品的上表面因为与抵板11下表面抵压接触出现损伤或痕迹。
25.本实施例中优选的技术方案,导杆5的数量为多根且垂直对称分布在挤压槽2内。多根导杆5可以起到限位的作用,防止挤压板3移动的过程中发生转动,并且多根导杆5也避免了挤压板3下表面与被夹取物品接触的时候出现受力不均匀的现象,保证了挤压板3移动的稳定性。
26.本实施例中优选的技术方案,膨胀型装置9为气囊,多个气囊相互靠近的一面均为弹性材质。气囊具有良好的伸缩性,弹性材质则可以保证膨胀型装置9的侧壁与待夹取物品的表面紧密贴合的效果更好。
27.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解。
28.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
技术特征:
1.一种夹取式机械臂,包括安装块(1),其特征在于,所述安装块(1)下表面开设有挤压槽(2),所述挤压槽(2)内滑动密封安装有挤压板(3),所述挤压板(3)下表面固定安装有抵杆(4),所述挤压槽(2)槽底垂直固定安装有导杆(5),所述挤压板(3)滑动密封套设在导杆(5)上,所述导杆(5)远离挤压槽(2)的一端固定套接有限位环(6),所述导杆(5)上固定套设有弹簧(7),所述弹簧(7)的两端分别与挤压槽(2)槽底和挤压板(3)上表面固定连接,所述安装块(1)下表面滑动安装有两根夹持爪(8),多根所述夹持爪(8)相互靠近的一面均固定安装有膨胀型装置(9),所述膨胀型装置(9)通过连接部件(10)与挤压槽(2)槽底处侧壁相连通。2.根据权利要求1所述的一种夹取式机械臂,其特征在于,所述连接部件(10)包括导气管(101),所述导气管(101)一端与挤压槽(2)槽底处侧壁相连通,所述膨胀型装置(9)的顶端固定安装有与其内部相连通的波纹管(102),所述导气管(101)远离挤压槽(2)的一端密封插设在波纹管(102)内。3.根据权利要求1所述的一种夹取式机械臂,其特征在于,所述抵杆(4)远离挤压板(3)的一端固定安装有抵板(11)。4.根据权利要求3所述的一种夹取式机械臂,其特征在于,所述抵板(11)下表面粘接有保护层(12),所述保护层(12)的材质为橡胶。5.根据权利要求1所述的一种夹取式机械臂,其特征在于,所述导杆(5)的数量为多根且垂直对称分布在挤压槽(2)内。6.根据权利要求1所述的一种夹取式机械臂,其特征在于,所述膨胀型装置(9)为气囊,多个所述气囊相互靠近的一面均为弹性材质。
技术总结
本实用新型公开了一种夹取式机械臂,包括安装块,所述安装块下表面开设有挤压槽,所述挤压槽内滑动密封安装有挤压板,所述挤压板下表面固定安装有抵杆,所述挤压槽槽底垂直固定安装有导杆,所述挤压板滑动密封套设在导杆上,所述导杆远离挤压槽的一端固定套接有限位环,所述导杆上固定套设有弹簧,所述弹簧的两端分别与挤压槽槽底和挤压板上表面固定连接,所述安装块下表面滑动安装有两根夹持爪,多根所述夹持爪相互靠近的一面均固定安装有膨胀型装置,所述膨胀型装置通过连接部件与挤压槽槽底处侧壁相连通。此新型与传统的相比,当夹取对象为不规则物体的时候,膨胀型装置的侧壁也会与该物体的表面紧密贴合,保证夹取工作的稳定性。稳定性。稳定性。
技术研发人员:崔梓迪 郝涛铭 狄海鹏 李书煜 石志宏 李晨 乔泽一 郭玮玒 程怡安 原媛
受保护的技术使用者:中北大学信息商务学院
技术研发日:2020.12.23
技术公布日:2021/9/17
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1