一种机器人自动换模夹爪的制作方法
1.本实用新型属于自动换模夹爪技术领域,具体涉及一种机器人自动换模夹爪。
背景技术:
2.现有的机器人自动换模夹爪是一种换模是将模具的产品换模时间、生产启动时间或调整时间等尽可能减少的一种过程改进方法。可显著地缩短机器安装、设定换模所需的时间。
3.原有器人自动换模夹爪在夹紧模具的过程中,会因为没有完全消除模具与腰型槽之间的间隙,最终导致模具在换模的过程中出现晃动,影响加工的效率。
技术实现要素:
4.为解决现有技术中存在的上述问题,本实用新型提供了一种机器人自动换模夹爪,具有模具在换模过程中不出现晃动特点。
5.为实现上述目的,本实用新型提供如下技术方案:一种机器人自动换模夹爪,包括固定块,所述固定块的中间位置处设置有连接块,所述固定块的一侧设置有气缸,所述连接块的一端与气缸通过螺栓固定连接,所述连接块的上方固定有传感器,所述传感器与固定块通过螺丝固定连接,所述连接块的下方设置有过渡块,所述过渡块与连接块通过焊接固定,所述固定块的底端设置有左勾杆和右勾杆,所述左勾杆和右勾杆之间为弹性连接,靠近所述左勾杆和右勾杆中间位置处开设有模具腰型槽,模具腰型槽的内部固定有一体式的聚氨酯垫,所述模具腰型槽内部用于放置模具。
6.作为本实用新型的一种机器人自动换模夹爪优选技术方案,所述过渡块的顶端凸起位置与连接块通过焊接相固定,所述过渡块的底端插入进与左勾杆和右勾杆前端部分。
7.作为本实用新型的一种机器人自动换模夹爪优选技术方案,所述左勾杆和右勾杆为l型结构,所述左勾杆和右勾杆的后端部分内侧紧贴着模具。
8.作为本实用新型的一种机器人自动换模夹爪优选技术方案,所述左勾杆和右勾杆为l型结构,所述左勾杆和右勾杆的后端部分内侧紧贴着模具。
9.作为本实用新型的一种机器人自动换模夹爪优选技术方案,所述气缸的外壳与固定块通过螺栓相连接。
10.与现有技术相比,本实用新型的有益效果是:该装置通过传感器检测到模具,气缸带动连接块向前运动,通过左右勾杆产生的弹性形变,从而消除勾杆与模具腰型槽之间的践行,最终使夹具夹紧模具。保证模具在换模过程中不出现晃动的现象。
附图说明
11.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。在附图中:
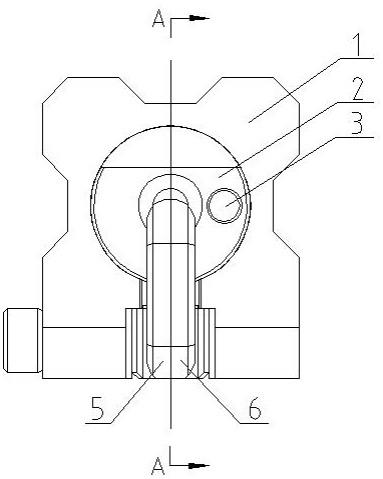
12.图1为本实用新型的结构示意图;
13.图2为图1中a
‑
a向的结构示意图;
14.图3为本实用新型气缸、聚氨酯垫和模具组合的结构示意图;
15.图中:1、固定块;2、连接块;3、传感器;4、过渡块;5、左勾杆;6、右勾杆;7、气缸;8、模具;9、聚氨酯垫。
具体实施方式
16.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
实施例
17.请参阅图1
‑
3,本实用新型提供以下技术方案:一种机器人自动换模夹爪,包括固定块1,固定块1的中间位置处设置有连接块2,固定块1的一侧设置有气缸7,连接块2的一端与气缸7通过螺栓固定连接,连接块2的上方固定有传感器3,传感器3与固定块1通过螺丝固定连接,连接块2的下方设置有过渡块4,过渡块4与连接块2通过焊接固定,固定块1的底端设置有左勾杆5和右勾杆6,左勾杆5和右勾杆6之间为弹性连接,靠近左勾杆5和右勾杆6中间位置处开设有模具腰型槽,模具腰型槽的内部固定有一体式的聚氨酯垫9,模具腰型槽内部用于放置模具8,本实施方案中,通过这样的设计能够夹取6千克以下的模具,保证模具在换模的过程中不出现晃动的现象。
18.具体的,过渡块4的顶端凸起位置与连接块2通过焊接相固定,过渡块4的底端插入进与左勾杆5和右勾杆6前端部分,本实施例中,通过气缸7,带动连接块2向一侧运动,进而带动过渡块4往同一方向运动,使得该装置产生一系列的运动,方便对模具进行夹紧。
19.具体的,左勾杆5和右勾杆6为l型结构,左勾杆5和右勾杆6的后端部分内侧紧贴着模具8,本实施例中,左勾杆5和右勾杆6贴着模具8,减少它们之间的间隙,避免在换模的过程中出现晃动。
20.具体的,气缸7的外壳与固定块1通过螺栓相连接,本实施例中,气缸7为工作件,通过其在装置一侧独立的设置,便于维修与检测。
21.本实用新型中夹爪各零部件均采用42crmo高强度钢,在把保证气缸能够推动左右勾杆的前提下,提高了夹爪夹取模具的重量。
22.本实用新型的工作原理及使用流程:本实用新型中该机器人手臂带动夹爪运动,当左、右勾杆穿过模具腰型槽后,传感器检测到模具,气缸带动连接块,向前运动,连接块带动过渡块向前,过渡块向前运动使左、右勾杆产生弹性变形而分开,从而消除了,勾杆与模具腰型槽之间的间隙,最终使夹爪夹紧模具。
23.最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种机器人自动换模夹爪,其特征在于:包括固定块(1),所述固定块(1)的中间位置处设置有连接块(2),所述固定块(1)的一侧设置有气缸(7),所述连接块(2)的一端与气缸(7)通过螺栓固定连接,所述连接块(2)的上方固定有传感器(3),所述传感器(3)与固定块(1)通过螺丝固定连接,所述连接块(2)的下方设置有过渡块(4),所述过渡块(4)与连接块(2)通过焊接固定,所述固定块(1)的底端设置有左勾杆(5)和右勾杆(6),所述左勾杆(5)和右勾杆(6)之间为弹性连接,靠近所述左勾杆(5)和右勾杆(6)中间位置处开设有模具腰型槽,模具腰型槽的内部固定有一体式的聚氨酯垫(9),所述模具腰型槽内部用于放置模具(8)。2.根据权利要求1所述的一种机器人自动换模夹爪,其特征在于:所述过渡块(4)的顶端凸起位置与连接块(2)通过焊接相固定,所述过渡块(4)的底端插入进与左勾杆(5)和右勾杆(6)前端部分。3.根据权利要求1所述的一种机器人自动换模夹爪,其特征在于:所述左勾杆(5)和右勾杆(6)为l型结构,所述左勾杆(5)和右勾杆(6)的后端部分内侧紧贴着模具(8)。4.根据权利要求1所述的一种机器人自动换模夹爪,其特征在于:所述气缸(7)的外壳与固定块(1)通过螺栓相连接。
技术总结
本实用新型属于自动换模夹爪技术领域,尤其为一种机器人自动换模夹爪,包括固定块,所述固定块的中间位置处设置有连接块,所述固定块的一侧设置有气缸,所述连接块的一端与气缸通过螺栓固定连接,所述连接块的上方固定有传感器,所述传感器与固定块通过螺丝固定连接,所述连接块的下方设置有过渡块,所述过渡块与连接块通过焊接固定,所述固定块的底端设置有左勾杆和右勾杆,所述左勾杆和右勾杆之间为弹性连接,近所述左勾杆和右勾杆中间位置处开设有模具腰型槽,装置通过传感器检测到模具,气缸带动连接块向前运动,通过左右勾杆产生的弹性形变,从而消除勾杆与模具腰型槽之间的践行,最终使夹具夹紧模具。保证模具在换模过程中不出现晃动的现象。中不出现晃动的现象。中不出现晃动的现象。
技术研发人员:王成国 曹光荣 吉方靖 高峰
受保护的技术使用者:江苏亚威机床股份有限公司
技术研发日:2020.12.28
技术公布日:2021/9/21
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1