基板保持机械手和基板搬运机器人的制作方法
该发明涉及基板保持机械手和基板搬运机器人,特别是涉及具备框架和叶片的基板保持机械手和基板搬运机器人。
背景技术:
1、以往,公知有具备框架和叶片的基板保持机械手。例如,在日本特开2013-69914号公报中公开有这样的机械手。
2、在上述日本特开2013-69914号公报中,公开有用于搬运基板的基板搬运用机械手(基板保持机械手)。该基板搬运用机械手具备框架、和支承于框架并且对基板进行支承的机械手主体部(叶片)。该基板搬运用机械手的框架的宽度与机械手主体部的宽度大致相同。
3、专利文献1:日本特开2013-69914号公报
4、在上述日本特开2013-69914号公报所记载的基板搬运用机械手,框架的宽度与机械手主体部(叶片)的宽度大致相同,因此存在框架的宽度比较大的不良情况。另一方面,在上述日本特开2013-69914号公报所记载的基板搬运用机械手中,可以认为在框架中存在没有被有效地利用于基板搬运用机械手的刚性的确保的部分,因此可以认为尚有确保基板保持机械手的刚性(机械强度)并且减小框架的宽度的余地。因此,在上述日本特开2013-69914号公报所记载的基板搬运用机械手中,可以认为存在难以确保基板保持机械手的刚性(机械强度)并且减小框架的宽度这一问题点。另外,可以认为也存在以下问题点,即:在无法减小框架的宽度的情况下,难以确保在框架的侧方配置部件的空间,并且难以容易地对配置于框架的侧方的部件进行维修(维护)。
技术实现思路
1、该发明的课题(目的)在于提供一种能够确保基板保持机械手的刚性(机械强度)、并且能够减小框架的宽度、从而能够与其对应地确保在框架的侧方配置部件的空间、并且能够容易地对配置于框架的侧方的部件进行维修(维护)的基板保持机械手和基板搬运机器人。
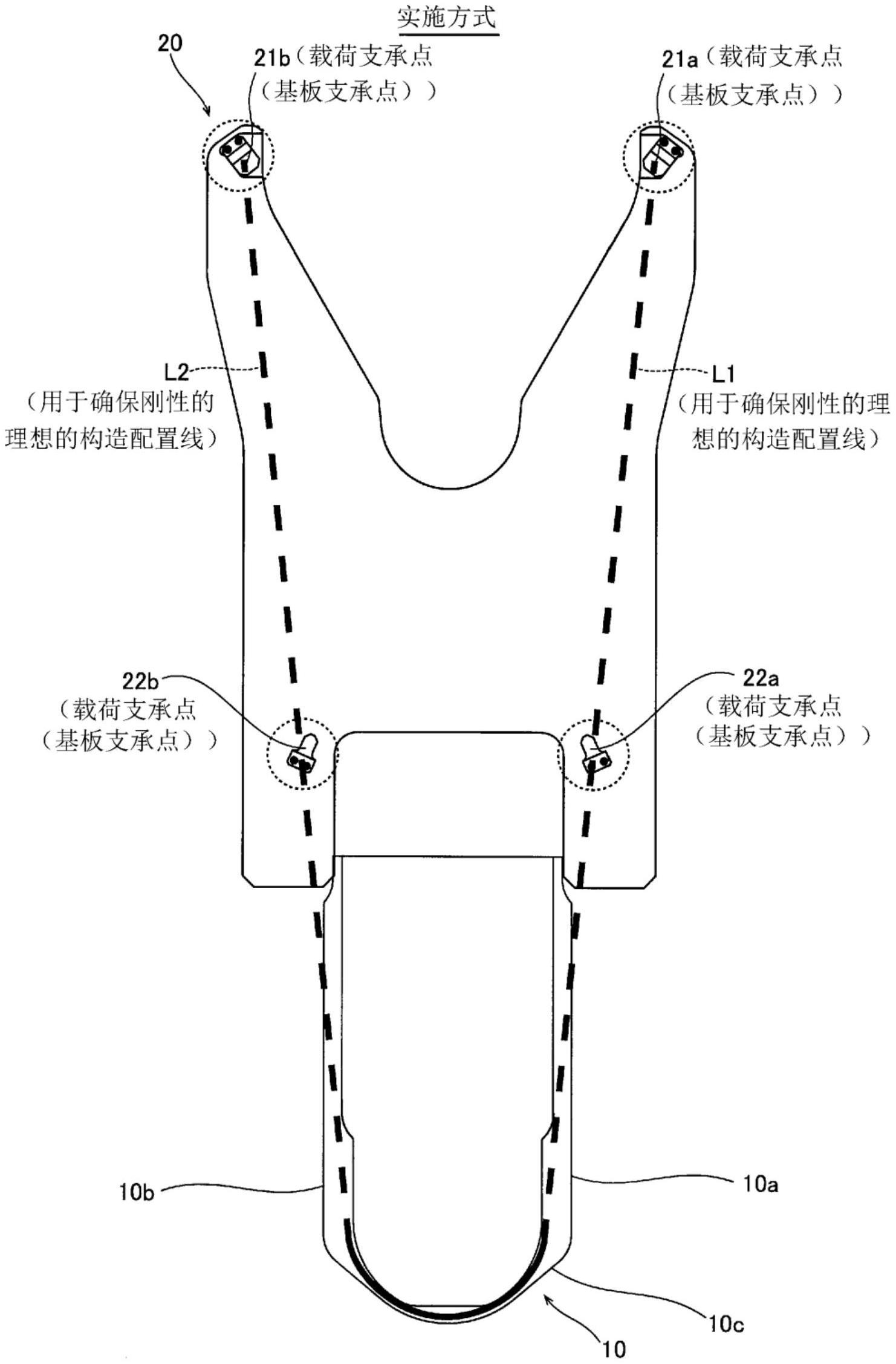
2、基于该发明的第1方面的基板保持机械手具备:框架;叶片,其支承于框架;一对前支承部,它们设置于叶片的前端部侧,并支承基板;以及一对后支承部,它们设置于叶片的基端部侧,并支承基板,框架、一对前支承部以及一对后支承部以形成为v字状的方式设置。此外,在本申请说明书中,v字状是不仅包括v字的基端部为锐角的形状,还包括v字的基端部如u字那样具有圆角的形状的广泛的概念。
3、基于该发明的第2方面的基板搬运机器人具备基板保持机械手、和使基板保持机械手移动的臂,基板保持机械手包括:框架;叶片,起支承于框架;一对前支承部,它们设置于叶片的前端部侧,并支承基板;以及一对后支承部,它们设置于叶片的基端部侧,并支承基板,框架、一对前支承部以及一对后支承部以形成为v字状的方式设置。
4、根据本发明,如上述那样,框架、一对前支承部以及一对后支承部以形成为v字状的方式设置,由此能够抑制在框架中产生未被有效地利用于基板保持机械手的刚性的确保的部分。其结果是,能够确保基板保持机械手的刚性(机械强度),并且能够减小框架的宽度,从而与其对应地能够确保在框架的侧方配置部件的空间,并且能够容易地对配置于框架的侧方的部件进行维修(维护)。
技术特征:
1.一种基板保持机械手,其特征在于,具备:
2.根据权利要求1所述的基板保持机械手,其特征在于,
3.根据权利要求1所述的基板保持机械手,其特征在于,
4.根据权利要求3所述的基板保持机械手,其特征在于,
5.根据权利要求4所述的基板保持机械手,其特征在于,
6.根据权利要求4所述的基板保持机械手,其特征在于,
7.根据权利要求4所述的基板保持机械手,其特征在于,
8.根据权利要求7所述的基板保持机械手,其特征在于,
9.根据权利要求8所述的基板保持机械手,其特征在于,
10.一种基板搬运机器人,其特征在于,具备:
技术总结
该基板保持机械手(1)具备:框架(10);叶片(20),其支承于框架;一对前支承部(21a、21b),它们设置于叶片的前端部(20a)侧,对基板(W)进行支承;以及一对后支承部(22a、22b),它们设置于叶片的基端部(20b)侧,对基板进行支承。框架、一对前支承部以及一对后支承部以形成为V字状的方式设置。
技术研发人员:清水一平
受保护的技术使用者:川崎重工业株式会社
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!