一种轨道式机器人自适应式行走装置的制作方法
1.本发明涉及运动、导向、顶紧机构,具体涉及一种轨道式机器人自适应式行走装置。
背景技术:
2.轨道式机器人已经广泛应用在各个领域,其中矿山领域的实际运行环境更为恶劣,低温零下20℃、粉尘、干燥、高原等恶劣环境较为常见。要求巡检机器人系统能够安全、稳定行走。目前现有的巡检机器人行走机构复杂、结构笨重、成本较高。个别轨道式机器人系统还需采用特别加工定制轨道,限制了巡检机器人系统的推广。因此,机器人自适应式行走装置更需要简洁化设计、轻量化设计、通用化设计。
技术实现要素:
3.本发明要解决的技术问题:针对现有技术的上述问题,提供一种能够实现安全稳定运行,轻量化、通用化设计的轨道式机器人自适应式行走装置。
4.为了优化上述技术缺点,本发明采用的技术方案为:本发明提供一种轨道式机器人自适应式行走装置,包括左主架2、右主架14、驱动连杆5、从动连杆8、转向支架9、顶升支架11、下端固定支架6、驱动轮7、承重轮4、转向轮3、顶升轮10。
5.一种轨道式机器人自适应式行走装置其特征在于,驱动轮7中心轴线与转向轮3中心轴线平行,承重轮4中心轴线与顶升轮10中心轴线平行,驱动轮7中心轴线与承重轮4中心轴线垂直。
6.进一步,左主架2与右主架14结构相互对称,安装位置也相互对称。
7.进一步,各个转向轮3的上表面位于同一水平面。
8.进一步,各个承重轮4的轴线位于同一水平面。
9.进一步,左主架2、右主架14、从动主架12上设有安装通孔,用来固定承重轮4。
10.进一步,左主架2、右主架14、从动主架12上设有开孔矩形槽,用轴类零件安装转向支架9并保证其可转动,其中转向支架9与左主架2、右主架14、从动主架12之间含有弹性元件,弹性元件可采用螺旋弹簧等其他形式的弹性元件,起到阻尼回位作用,以保证转弯及轨道13不平整情况,行走机构顺利通过。
11.进一步,驱动轮7分布在轨道13两侧。
12.进一步,从动连杆8与从动主架12通过轴类零件连接可转动,与左主架2之间含有弹性元件1及导向装置。使得行走装置含有自适应能力,保证巡检机器人良好的通过性。
13.进一步,顶升支架11与下端固定支架6之间含有弹性元件1及导向装置。使得行走装置运行平稳,不发生侧向晃动。
14.进一步,行走装置还包括安装主板,左主架2、右主架14、从动主架12、下端固定支架6都固定在安装主板上。
15.进一步,驱动轮7布置在承重轮4中间,顶升轮10布置在轨道下方。
16.有益效果1.本发明一种轨道式机器人自适应式行走装置,其特点是采用了一种紧凑的结构布局,集成度高。零件多为板材,避免使用铸件使得整个行走机构质量更轻,运行阻力更小。
17.2.本发明一种轨道式机器人自适应式行走装置采用对称化结构布局,采用相互对称零件,使得行走装置零件通用性好,互换性好。
18.3.本发明一种轨道式机器人自适应式行走装置采用单侧电机驱动,与以往双侧驱动相比,结构简单,价格便宜,稳定性好。
19.4.本发明一种轨道式机器人自适应式行走装置,能够自适应的进行前后行走、转弯、上下坡,而且运行稳定,行走轨道为国标工字钢,具有较好的市场推广前景。
附图说明
20.图1为本发明一种轨道式机器人自适应式行走装置立体图。
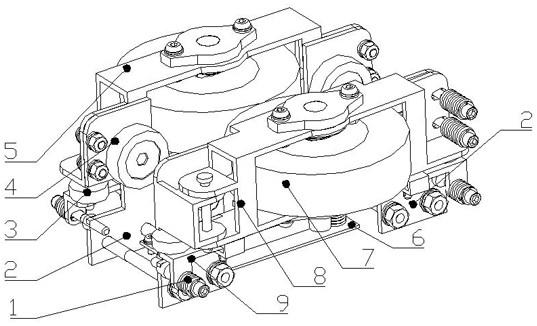
21.图2为本发明一种轨道式机器人自适应式行走装置左视立体图。
22.图3为本发明一种轨道式机器人自适应式行走装置侧视立体图。
23.图例说明:1、弹性元件;2、左主架;3、转向轮;4、承重轮;5、驱动连杆;6、下端固定支架;7、驱动轮;8、从动连杆;9、转向支架;10、顶升轮;11、顶升支架;12.从动主架;13.轨道;14.右主架。
具体实施方式
24.下面将参考附图来详细说明本发明。
25.如图1所示,左主架2、右主架14、从动主架12承对称布置,有利于均匀承受载荷,使机器人行走平稳。承重轮4中心轴线垂直于左主架2布置,并且四个承重轮4中心轴线处于同一水平面,使承重轮4受力均匀,不会发生个别严重磨损。转向轮3固定于转向支架9,结合销轴或其他轴类零件实现与左主架2可相对旋转的状态,又结合弹性元件1及导向杆类元件将转向支架9连接到左主架2上,实现二者之间的弹性阻尼限位功能,两侧的转向轮3在弹性元件1的作用下,平稳地贴合在轨道13两侧。使得机器人在转向及直行状态下,能够平稳运行。
26.如图2所示,两个驱动轮7承轨道13两侧布置,通过轴承类零件固定在相应的驱动连杆5、从动连杆8上。同时从动连杆8相对于从动主架12一端采用销钉类可转动零件固定,另一端通过弹性元件1及导向元件连接到左主架2,从而实现自动张紧功能。从而使行走机构具备自适应性,可自行通过轨道接缝及个别不平整的区域。
27.动力由单侧电机通过联轴器传输到驱动轴,驱动力在反作用力即摩擦力的作用下驱动机器人向前或者向后行走。驱动连杆5、从动连杆8 分别固定在左主架2、右主架14、从动主架12上,从而实现行走机构的紧凑布局,实现行走机构集成化,小型化布置方案。
28.如图3所示,行走机构位于轨道下端的位置布置有张紧装置,顶升轮10固定在顶升支架11上,顶升支架11与下固定支架6通过弹性及导向元件进行连接,可上下进行位移,同时具备弹性回位功能。从而使行走机构在轨道13上下方向也具备张紧能力,使机器人平稳地在轨道上行走,而不发生晃动。左主架2、右主架14、从动主架12及下固定支架6固定在安装主板上。
29.以上所述仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
技术特征:
1.一种轨道式机器人自适应式行走装置,其特征在于:包括左主架2、右主架14、顶升支架11、下端固定支架6、驱动连杆5、从动连杆8、从动主架12;驱动连杆5两端固定在左主架2、右主架14上,驱动连杆5上装有驱动轮7及转轴,从动连杆8设有驱动轮7和转轴,从动连杆8一端和从动主架12可相对旋转,另一端可张紧调节;左主架2、右主架14、从动主架12上设有承重轮4,左主架2、右主架14、从动主架12上还设有转向支架9,转向支架9上设有转向轮3,转向支架9一端可相对旋转,另一端可张紧调节;顶升支架11上固定有顶升轮10,顶升支架11与下端固定支架6之间设有弹性元件1,可相对上下移动并回位。2.根据权利要求1所述的一种轨道式机器人自适应式行走装置,其特征在于:驱动轮7中心轴线与转向轮3中心轴线平行,承重轮4中心轴线与顶升轮10中心轴线平行,驱动轮7中心轴线与承重轮4中心轴线垂直。3.根据权利要求1所述的一种轨道式机器人自适应式行走装置,其特征在于:左主架2与右主架14相互对称,安装位置相互对称。4.根据权利要求1所述的一种轨道式机器人自适应式行走装置,其特征在于:四个转向轮3的上表面位于同一水平面,中心轴线相互平行,四个承重轮4的轴线位于同一水平面;两个驱动轮7的轴线相互平行;驱动轮7分布在轨道13两侧。5.根据权利要求1所述的一种轨道式机器人自适应式行走装置,其特征在于:顶升轮10布置在轨道13下方。6.根据权利要求1所述的一种轨道式机器人自适应式行走装置,其特征在于:左主架2、右主架14、从动主架12、下端固定支架6固定在安装主板上。
技术总结
本发明公开了一种轨道式机器人自适应式行走装置,驱动轮通过轴类零件固定在驱动连杆及从动连杆上,两连杆固定在主架上,同时从动连杆与主架之间设有弹性导向装置,以满足行走机构自适应性。承重轮承对称布局固定在主架上,转向机构包括转向支架及弹性元件、导向元件、转向轮,其中转向支架一端连接在主架上,可相对主架进行弹性旋转及回位。主架及转向机构承对称布局,分布在驱动轮、从动轮的两侧,使得行走装置载荷分布均匀,运行稳定。本发明能够实现轨道式机器人在环境相对恶劣的情况下稳定运行,由于在轨道各个方向设有夹紧装置,可保证机器人运行过程中无明显晃动、行走平稳、自适应性好。自适应性好。自适应性好。
技术研发人员:王晨光 李晓刚 关兵 宋海峰 吴迪 蒋宝庆 杜国军 连春宇 时玉明 麦强 赵立志 毕文 王子亮 王建辉
受保护的技术使用者:丹东东方测控技术股份有限公司
技术研发日:2021.04.10
技术公布日:2022/10/17
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1