一种基于深度学习双目相机的双轮差速机器人避障方法与流程
的距离l,获得相机的焦距以及相机和标记点m之间的距离l,利于相似三角形原理,计算出标记点m高度h。
15.优选的,所述步骤三中利用o、o1与标记点m距离、高度h,计算出o1的坐标值。
16.优选的,以所述机器人设定半径r为安全距离,当标记点m和机器人之间的距离l满足|l-r|<c,c为预设安全等级距离,则重新规划线路。
17.优选的,所述步骤一中机器人的活动区域还设置有校准点g,机器人可以根据校准点g更新相对于绝对坐标轴的位置。
18.优选的,所述校准点g设置有多个。
19.(三)有益效果
20.本发明提供了一种基于深度学习双目相机的双轮差速机器人避障方法。
21.具备以下有益效果:
22.1、本发明,采用渐进的方式到达目标点,并通过标记点计算修正实际移动误差。
23.2、本发明,由于通过标记点计算,也可以消除机器人自身移动过程中,滚轮和地面也打滑造成的误差。
附图说明
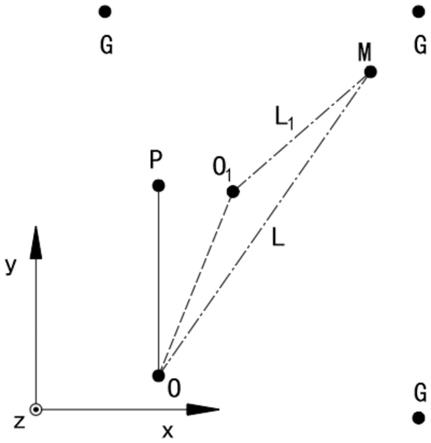
24.图1为本发明的水平距离计算模型;
25.图2为本发明的高度计算模型示意图。
26.图1中:o、机器人原点;p、机器人预计到达的位置;o1、机器人实际到达的位置;m、标记点的位置;l、o相对与m的距离;l1、o1相对与m的距离;g、校准点;
27.图2中:m、标记点的位置;q、相机水平角度图像中心点;q1、m相机图像中的位置;f、焦点;l、q和q1的距离,h、标记点的高度。
具体实施方式
28.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
29.实施例:
30.本发明实施例提供一种基于深度学习双目相机的双轮差速机器人避障方法,包括以下步骤:
31.步骤一:在机器人活动的区域内,建立绝对坐标系,采用笛卡尔坐标系o
xyz
,方便确定机器人的绝对位置,同时利于目标点的给定,并确定机器人的位置原点o和选定目标点,以就近的原则规划路线,通常两点之间直线最短,但是预先规划的路线存在遮挡物,故进行遇到遮挡物时,需要再次使用就近原则进行规划路线,机器人的活动区域还设置有校准点g,机器人可以根据校准点g更新相对于绝对坐标轴的位置,用于消除机器人移动过程中的累积的误差,校准点g设置有多个,其形式和agv智能平板车一样,通过地标获取当前位置,但是于agv智能平板车不同的是,agv智能平板车移动过程中至少有一个地标被读取,本方案中校准点g仅在机器人遇到后,进行被动更新位置;
32.步骤二:机器人从相机拍摄的图片、视频进行识别,判别遮挡物,获得遮挡物位置并重新规划路线,并在遮挡物上选取标记点m,标记点m选取多组,测算机器人在o位置相对标记点m的距离l,如图1所示,利用双目相机,直接得出距离标记点m的距离l,以及标记点m高度h,标记点m高度h测量方式为,如图2所示,获取相机水平角度图像中心点q,以及标记点m相机图像中的位置q1,计算得出图像中心点q和标记点m相机图像中的位置q1的距离l,通常为图像的像素距离,获得相机的焦距以及相机和标记点m之间的距离l,利于相似三角形原理,计算出标记点m高度h;
33.步骤三:预设机器人在路线上预计到达的位置p,机器人移动到达实际位置o1,并继续测量相对标记点m的距离l,以及标记点m高度h,结合步骤二测量的数据,在位置原点o计算出实际位置o1,所计算出的实际位置o1有多组,通过计算三个坐标的数值的平均数作为实际位置o1,即利用o、o1与标记点m距离、高度h,计算出o1的坐标值,并和预计到达的位置p进行计算,预计到达的位置p和实际位置o1对应坐标进行差值计算,获得偏差值(δx,δy,δz);
34.步骤四:机器人继续移动,并将当前位置作为位置原点o,重新选取标记点m,在前往下一个预计到达的位置p的过程中,使用步骤三所获得的偏差值(δx,δy,δz)修正机器人移动路线,即将偏差值加权值预设的位置p中,机器人到达下一个实际位置o1后,再次计算重新选取标记点m相对与现在位置的偏差值(δx,δy,δz),多次选取的标记点m可以为同一个,可降低重新选取标记点误差,提高在不同的位置的计算精度;
35.步骤五:重复步骤三和四,直至机器人到达目标点。
36.机器人设定半径r为安全距离,当标记点m和机器人之间的距离l满足|l-r|<c,c为预设安全等级距离,则重新规划线路,c可以人为设定,c值越大,即机器人发生碰撞的可能性越小,机器人运行的安全性越高。
37.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
技术特征:
1.一种基于深度学习双目相机的双轮差速机器人避障方法,其特征在于,包括以下步骤:步骤一:在机器人活动的区域内,建立绝对坐标系,并确定机器人的位置原点o和选定目标点,以就近的原则规划路线;步骤二:机器人从相机拍摄的图片、视频进行识别,判别遮挡物,获得遮挡物位置并重新规划路线,并在遮挡物上选取标记点m,标记点m选取多组,测算机器人在o位置相对标记点m的距离l,以及标记点m高度h;步骤三:预设机器人在路线上预计到达的位置p,机器人移动到达实际位置o1,并继续测量相对标记点m的距离l,以及标记点m高度h,结合步骤二测量的数据,在位置原点o计算出实际位置o1,并和预计到达的位置p进行计算,获得偏差值(δx,δy,δz);步骤四:机器人继续移动,并将当前位置作为位置原点o,重新选取标记点m,在前往下一个预计到达的位置p的过程中,使用步骤三所获得的偏差值(δx,δy,δz)修正机器人移动路线,机器人到达下一个实际位置o1后,再次计算重新选取标记点m相对与现在位置的偏差值(δx,δy,δz);步骤五:重复步骤三和四,直至机器人到达目标点。2.根据权利要求1所述的一种基于深度学习双目相机的双轮差速机器人避障方法,其特征在于:所述步骤三中,标记点m高度h测量方式为,获取相机水平角度图像中心点q,以及标记点m相机图像中的位置q1,计算得出图像中心点q和标记点m相机图像中的位置q1的距离l,获得相机的焦距以及相机和标记点m之间的距离l,利于相似三角形原理,计算出标记点m高度h。3.根据权利要求2所述的一种基于深度学习双目相机的双轮差速机器人避障方法,其特征在于:所述步骤三中利用o、o1与标记点m距离、高度h,计算出o1的坐标值。4.根据权利要求1所述的一种基于深度学习双目相机的双轮差速机器人避障方法,其特征在于:以所述机器人设定半径r为安全距离,当标记点m和机器人之间的距离l满足|l-r|<c,c为预设安全等级距离,则重新规划线路。5.根据权利要求1所述的一种基于深度学习双目相机的双轮差速机器人避障方法,其特征在于:所述步骤一中机器人的活动区域还设置有校准点g,机器人可以根据校准点g更新相对于绝对坐标轴的位置。6.根据权利要求5所述的一种基于深度学习双目相机的双轮差速机器人避障方法,其特征在于:所述校准点g设置有多个。
技术总结
本发明提供一种基于深度学习双目相机的双轮差速机器人避障方法,涉及人工智能领域。该基于深度学习双目相机的双轮差速机器人避障方法,在机器人活动的区域内,建立绝对坐标系,并确定机器人的位置原点O和选定目标点,以就近的原则规划路线,机器人从相机拍摄的图片、视频进行识别,判别遮挡物,获得遮挡物位置并重新规划路线,并在遮挡物上选取标记点M,标记点M选取多组,测算机器人在O位置相对标记点M的距离L,以及标记点M高度H,设机器人在路线上预计到达的位置P,获得偏差值(ΔX,ΔY,ΔZ)。机器人以渐进的方式到达目标点,并通过标记点计算修正实际移动误差。记点计算修正实际移动误差。记点计算修正实际移动误差。
技术研发人员:蒋莉滨 陈旭 钟晓泉 李密 李家维 林雅婷
受保护的技术使用者:福建省海峡智汇科技有限公司
技术研发日:2021.10.28
技术公布日:2022/1/6
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1