传动机构及机器人的制作方法
本申请属于传动装置,具体涉及传动机构及机器人。
背景技术:
1、目前,常规scara机器人一般采用电机与减速机的组合作为一二轴的驱动装置,该方式通常采用谐波减速机或rv减速机,上述减速机成本高、精度有限制。并且常规整机布局采用将二轴驱动装置直接与小臂连接,该种方式导致对一轴输出力矩需求较大,需要采用较大的电机或减速机,从而使整机的体积、重量过大影响了整机性能。因此出现了将二轴的驱动装置后移,通过同步带传动带动小臂运动,该方式可降低整机重量及尺寸。但目前,同步带传动的传动精度不够,对整机性能有影响。
技术实现思路
1、本申请提供传动机构及机器人,以解决现有传动机构传动精度不够的技术问题。
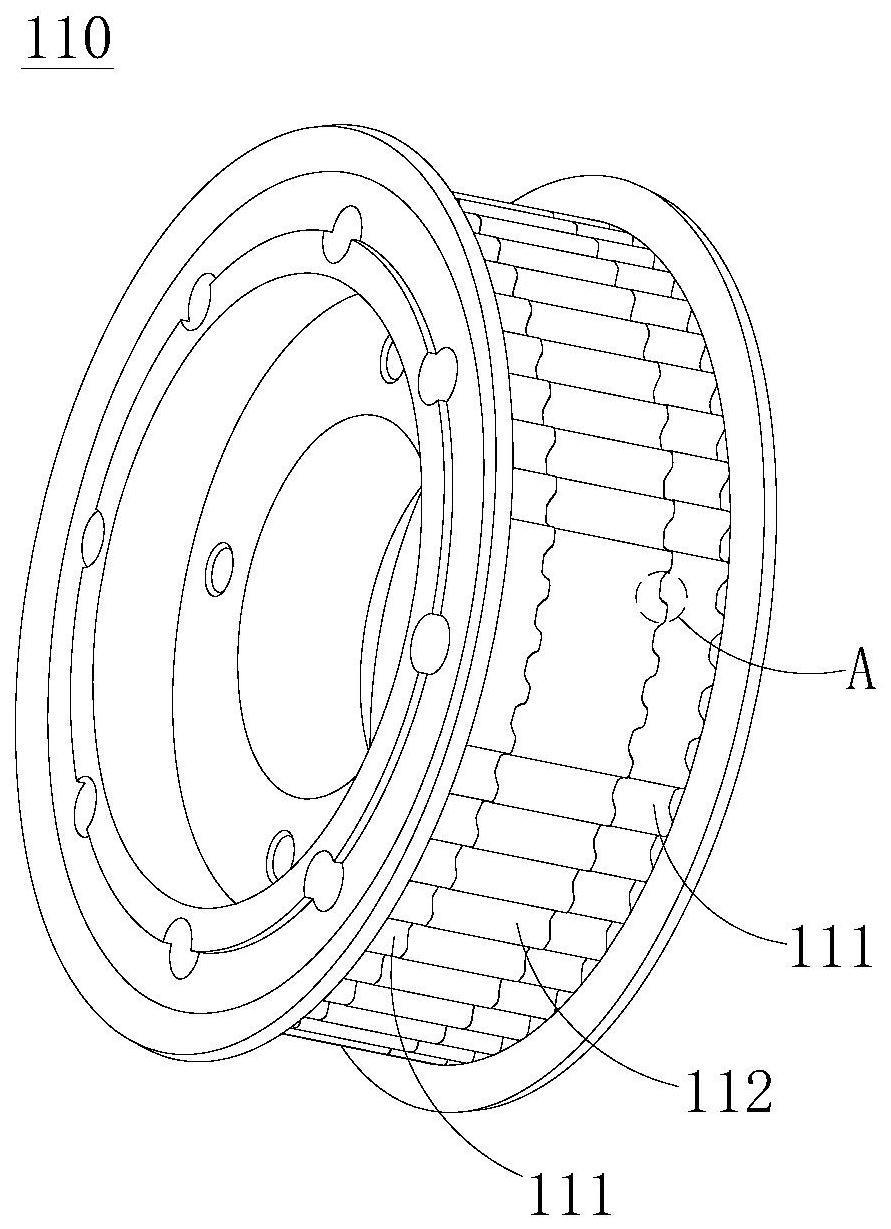
2、为解决上述技术问题,本申请采用的一个技术方案是:一种传动机构,包括:同步带轮,包括同轴设置的至少一个第一子带轮和至少一个第二子带轮,所述第一子带轮和所述第二子带轮的齿数和齿形相同,所述第一子带轮和所述第二子带轮的轮齿相错设置;同步带,与所述同步带轮啮合,且所述同步带的带齿的一侧与所述第一子带轮的轮齿贴合,所述同步带的带齿的另一侧与所述第二子带轮的轮齿贴合。
3、根据本申请一实施方式,所述第一子带轮沿其轴向的宽度之和,等于所述第二子带轮沿其轴向的宽度之和。
4、根据本申请一实施方式,所述第一子带轮设置有两个,所述第二子带轮设置有一个,两个所述第一子带轮位于所述第二子带轮的两侧。
5、为解决上述技术问题,本申请采用的又一个技术方案是:一种机器人,包括:主传动臂;副传动臂,与所述主传动臂转动连接;传动机构,设置于所述主传动臂内,如上述;所述传动机构中包括第一同步带轮和第二同步带轮,所述同步带连接所述第一同步带轮和第二同步带轮,所述副传动臂与第一同步带轮同轴固定;驱动机构,与所述第二同步带轮同轴固定,以驱动所述第二同步带轮转动。
6、根据本申请一实施方式,包括:第一轴承座,固定设置于所述主传动臂;第一轮轴,转动设置于所述主传动臂,且与所述副传动臂同轴固定;第一轴承,所述第一轴承的内圈压盖连接所述第一轮轴,外圈压盖连接所述第一轴承座。
7、根据本申请一实施方式,包括:第二轴承座,固定设置于所述主传动臂;第二轮轴,转动设置于所述主传动臂,且与所述第二同步带轮同轴固定;第二轴承,所述第二轴承的内圈压盖连接所述第二轮轴,外圈压盖连接所述第二轴承座。
8、根据本申请一实施方式,包括:编码器,设于所述副传动臂,且与所述第一同步带轮同轴设置,以感应所述第一同步带轮的转动。
9、根据本申请一实施方式,所述编码器包括:编码器传递轴,固定设置于所述主传动臂,与所述第一同步带轮同轴设置;编码器定子,固定设置于所述副传动臂,与所述编码器传递轴同轴设置;编码器转子,固定设置于所述编码器传递轴,以绕所述编码器定子转动。
10、根据本申请一实施方式,包括:支撑轴承,所述支撑轴承的内圈连接所述编码器传递轴,外圈连接所述第一轮轴。
11、根据本申请一实施方式,所述第一轴承座上设置有沿所述同步带长度方向设置的条形孔,所述第一轴承座通过紧固螺钉固定于所述主传动臂,所述紧固螺钉穿过所述条形孔与所述主传动臂螺纹连接。
12、根据本申请一实施方式,所述第一轴承座端部设置有张紧力调节螺钉孔,所述第一轴承座通过张紧力调节螺钉连接于所述主传动臂,以调节所述同步带的张紧。
13、本申请的有益效果是:通过将同步带轮设置为同轴设置的第一子带轮和第二子带轮,且第一子带轮和第二子带轮的轮齿相错设置。当同步带轮正反转时,同步带轮的轮齿与同步带的带齿均无间隙啮合。本申请实施例的同步带传动机构可以有效消除传动过程中的啮合间隙,提高传动精度从而提高应用该传动机构的机器人的整机精度,并且本申请实施例的传动机构结构简单,加工、安装容易,成本低。
技术特征:
1.一种传动机构,其特征在于,包括:
2.根据权利要求1所述的传动机构,其特征在于,所述第一子带轮沿其轴向的宽度之和,等于所述第二子带轮沿其轴向的宽度之和。
3.根据权利要求1所述的传动机构,其特征在于,所述第一子带轮设置有两个,所述第二子带轮设置有一个,两个所述第一子带轮位于所述第二子带轮的两侧。
4.一种机器人,其特征在于,包括:
5.根据权利要求4所述的机器人,其特征在于,包括:
6.根据权利要求4所述的机器人,其特征在于,包括:
7.根据权利要求5所述的机器人,其特征在于,包括:
8.根据权利要求7所述的机器人,其特征在于,所述编码器包括:
9.根据权利要求8所述的机器人,其特征在于,包括:
10.根据权利要求7所述的机器人,其特征在于,所述第一轴承座上设置有沿所述同步带长度方向设置的条形孔,所述第一轴承座通过紧固螺钉固定于所述主传动臂,所述紧固螺钉穿过所述条形孔与所述主传动臂螺纹连接。
11.根据权利要求10所述的机器人,其特征在于,所述第一轴承座端部设置有调节螺钉孔,所述第一轴承座通过张紧力调节螺钉连接于所述主传动臂,以调节所述同步带的张紧。
技术总结
本申请公开传动机构及机器人,其中传动机构包括:同步带轮,包括同轴设置的至少一个第一子带轮和至少一个第二子带轮,第一子带轮和第二子带轮的齿数和齿形相同,第一子带轮和第二子带轮的轮齿相错设置;同步带,与同步带轮啮合,且同步带的带齿的一侧与第一子带轮的轮齿贴合,同步带的带齿的另一侧与第二子带轮的轮齿贴合。通过将同步带轮设置为同轴设置的第一子带轮和第二子带轮,且第一子带轮和第二子带轮的轮齿相错设置,当同步带轮正反转时,同步带轮的轮齿与同步带的带齿均无间隙啮合。本申请实施例的同步带传动机构可以有效消除传动过程中的啮合间隙,提高传动精度从而提高应用该传动机构的机器人的整机精度。
技术研发人员:金明亮,吴文镜,赖建林,陈文杰
受保护的技术使用者:美的集团(上海)有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!