机器人装置的制作方法
本申请涉及人工智能,具体涉及一种机器人装置。
背景技术:
1、随着人工智能技术的发展,智能机器人在各行业的应用越来越多。机器人的内部运动结构直接影响机器人在地面行走的稳定性。目前市场上的机器人装置不能适应凹凸不平的地面环境。如何使机器人装置更好的适应凹凸不平的地面环境成为需要解决的技术问题。
技术实现思路
1、本申请提供了一种提高机器人对凹凸不平的地面环境适应能力的机器人装置,能够使机器人适应凹凸不平的地面正常行驶。
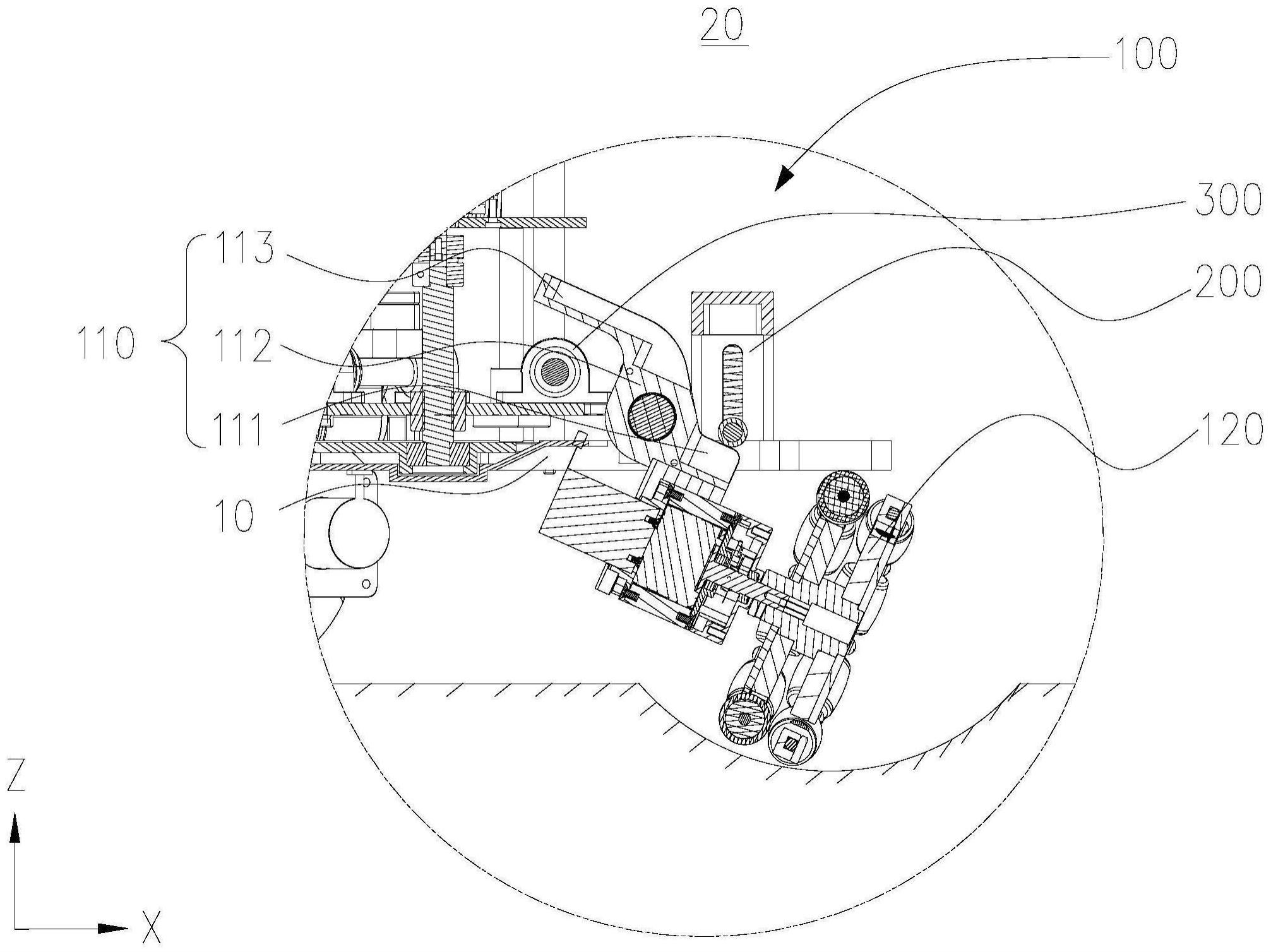
2、本申请提供的一种机器人装置,所述机器人装置包括底座以及设于所述底座上的至少两组行走机构,所述行走机构包括:
3、行走轮组件,包括摆臂和行走轮,所述摆臂包括依次连接的第一支臂、转动部及第二支臂,所述转动部转动连接所述底座,所述行走轮的一端连接所述摆臂的第一支臂,所述行走轮用于在地面行走;
4、压合组件,设于所述底座上,所述压合组件压合于所述摆臂的第一支臂背离地面的一侧;以及
5、限位组件,设于所述底座上,所述限位组件用于在所述行走轮于水平地面行走时抵接于所述摆臂的第二支臂朝向地面的一侧;所述摆臂的第一支臂还用于在所述行走轮于凹坑中下行过程中在所述压合组件的作用下绕所述底座朝向地面转动,使所述行走轮贴合于地面,及所述摆臂的第二支臂与所述限位组件分离。
6、本申请提供的机器人装置,通过在行走轮组件中设置摆臂,使行走轮能够通过摆臂转动连接底座,限位组件在行走轮于水平地面行走时抵接于摆臂的第二支臂朝向地面的一侧,机器人装置在行驶过程中遇见凹坑时,压合组件压合于摆臂,使摆臂的第一支臂绕转动部顺时针转动并且带动行走轮向下滑动与凹坑地面接触,使行走轮贴合于地面,机器人装置能够更加适应路面中具有凹坑的情况,提高了机器人装置在行走过程中对凹凸不平的路面的适应能力。
技术特征:
1.一种机器人装置,其特征在于,包括底座以及设于所述底座上的至少两组行走机构;所述行走机构包括:
2.如权利要求1所述的机器人装置,其特征在于,所述机器人装置还包括升降组件,所述升降组件设于所述底座上,所述升降组件连接所述限位组件,所述升降组件用于在所述行走轮在凸起越障时抬高所述限位组件,所述限位组件带动所述摆臂的第二支臂朝向远离地面的一侧转动,使所述底座抬高。
3.如权利要求2所述的机器人装置,其特征在于,所述行走轮组件还包括连接模块,所述连接模块连接于所述摆臂的第一支臂朝向地面的一侧和所述行走轮的中心轴之间,当所述限位组件带动所述摆臂的第二支臂朝向远离地面的一侧转动时,所述连接模块随着所述摆臂的第二支臂的转动逐渐抬高所述底座。
4.如权利要求3所述的机器人装置,其特征在于,所述连接模块包括行走轮电机和行走轮减速器,所述行走轮电机、所述行走轮减速器与所述行走轮依次连接,所述行走轮减速器远离地面的一端连接所述摆臂的第一支臂,所述行走轮电机用于经所述行走轮减速器带动所述行走轮转动。
5.如权利要求1~4任意一项所述的机器人装置,其特征在于,所述压合组件包括压合基座及设于所述压合基座内的弹性压合模块,所述压合基座设于所述底座上,所述弹性压合模块弹性压合于所述摆臂的第一支臂背离地面的一侧。
6.如权利要求5所述的机器人装置,其特征在于,所述弹性压合模块包括压合转轴及弹性件,所述压合转轴压合于所述摆臂的第一支臂,所述弹性件设于所述压合转轴背离所述摆臂的第一支臂的一侧,所述弹性件处于被压缩状态。
7.如权利要求2~4任意一项所述的机器人装置,其特征在于,所述升降组件包括至少一个导向杆以及依次排列的升降电机、升降丝杆和升降台;
8.如权利要求7所述的机器人装置,其特征在于,所述限位组件包括限位杆和相对设置的两个限位基座,所述限位基座凸设于所述升降台,所述限位杆的相对两端分别转动连接于两个所述限位基座,所述限位杆用于在所述行走轮在水平地面行走时抵接于所述摆臂的第二支臂朝向地面的一侧。
9.如权利要求1~4任意一项所述的机器人装置,其特征在于,所述机器人装置还包括设于所述底座上的摆臂基座,所述摆臂的转动部转动连接所述摆臂基座;
10.如权利要求1~4任意一项所述的机器人装置,其特征在于,所述机器人装置还包括检测器和第一控制器,所述检测器包括激光雷达、超声波传感器、红外传感器中的至少一者,所述检测器用于感知路况信息,并将所述路况信息传送至所述第一控制器,所述第一控制器用于根据所述路况信息控制所述机器人装置行走和越障。
11.如权利要求10所述的机器人装置,其特征在于,所述机器人装置还包括支撑平台及旋转电机,所述支撑平台固定于所述底座上,且位于所述压合组件背离所述底座的一侧,所述旋转电机及所述检测器设于所述支撑平台,所述旋转电机用于带动所述检测器绕垂直于所述底座的方向转动。
12.如权利要求1~4任意一项所述的机器人装置,其特征在于,所述至少两组行走机构的行走轮包括间隔设置的第一行走轮及第二行走轮,所述机器人装置还包括第二控制器,所述第二控制器用于控制所述第一行走轮和所述第二行走轮转动,使所述机器人装置前进、后退或转弯。
13.如权利要求12所述的机器人装置,其特征在于,所述至少两组行走机构的行走轮还包括第三行走轮,所述第三行走轮、所述第一行走轮及所述第二行走轮环绕于所述底座的周侧设置,所述第二控制器用于在所述机器人装置前进和后退时,控制所述第一行走轮和所述第二行走轮分别反向转动,且控制所述第三行走轮静止;所述第二控制器还用于在所述机器人装置转弯时控制所述第一行走轮、所述第二行走轮、所述第三行走轮同向转动。
技术总结
本申请提供了一种机器人装置,包括底座以及设于底座上的行走机构,行走机构包括:行走轮组件、压合组件及限位组件,行走轮组件包括摆臂和行走轮,摆臂包括依次连接的第一支臂、转动部及第二支臂,转动部连接所述底座,行走轮连接第一支臂,行走轮用于在地面行走;压合组件压合于第一支臂背离地面的一侧;限位组件设于底座上,限位组件在行走轮于水平地面行走时抵接于第二支臂朝向地面的一侧;第一支臂还用于在行走轮于凹坑中下行中在压合组件的作用下绕底座朝向地面转动,使行走轮贴合于地面。本申请提高了机器人装置在行走过程中对凹凸不平的路面的适应能力。
技术研发人员:符勇
受保护的技术使用者:OPPO广东移动通信有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!