一种工业机器人中空关节线缆布置结构的制作方法
本发明涉及工业机器人领域,具体地说是一种工业机器人中空关节线缆布置结构。
背景技术:
1、随着工业生产规模的不断扩大,机器人已经逐渐在工业领域获得推广应用,其中中空型机器人作为工业机器人的一种,其可适用于空间狭小的场合,或是要求机器人末端运动更加灵活以及有较高ip等级要求的领域,如弧焊、食品等领域。中空型机器人要求机器人本体走线内置,并且要在机器人两运动关节中心形成较大的中空直径,以方便末端夹手等机器人末端装置所用的线缆通过,因此相关的机器人线缆布置和保护结构设计也就成为了中空型机器人关节部件设计的一个重要环节。而现有的机器人关节部件线缆排布设计通常一方面要满足有限的关节外形尺寸要求,另一方面还要满足机器人相关的运动要求,会占用较多的安装空间,因此很难实现较大的中空直径,难以满足中空型机器人的装配要求。
技术实现思路
1、本发明的目的在于提供一种工业机器人中空关节线缆布置结构,可利用转接驱动机构驱动末端装置或下一关节在±180°范围内相对转动,并且机器人本体线缆设于关节组件一侧,不影响关节转动,同时可以使关节壳体内部实现较大的中空直径,满足中空型机器人的装配要求。
2、本发明的目的是通过以下技术方案来实现的:
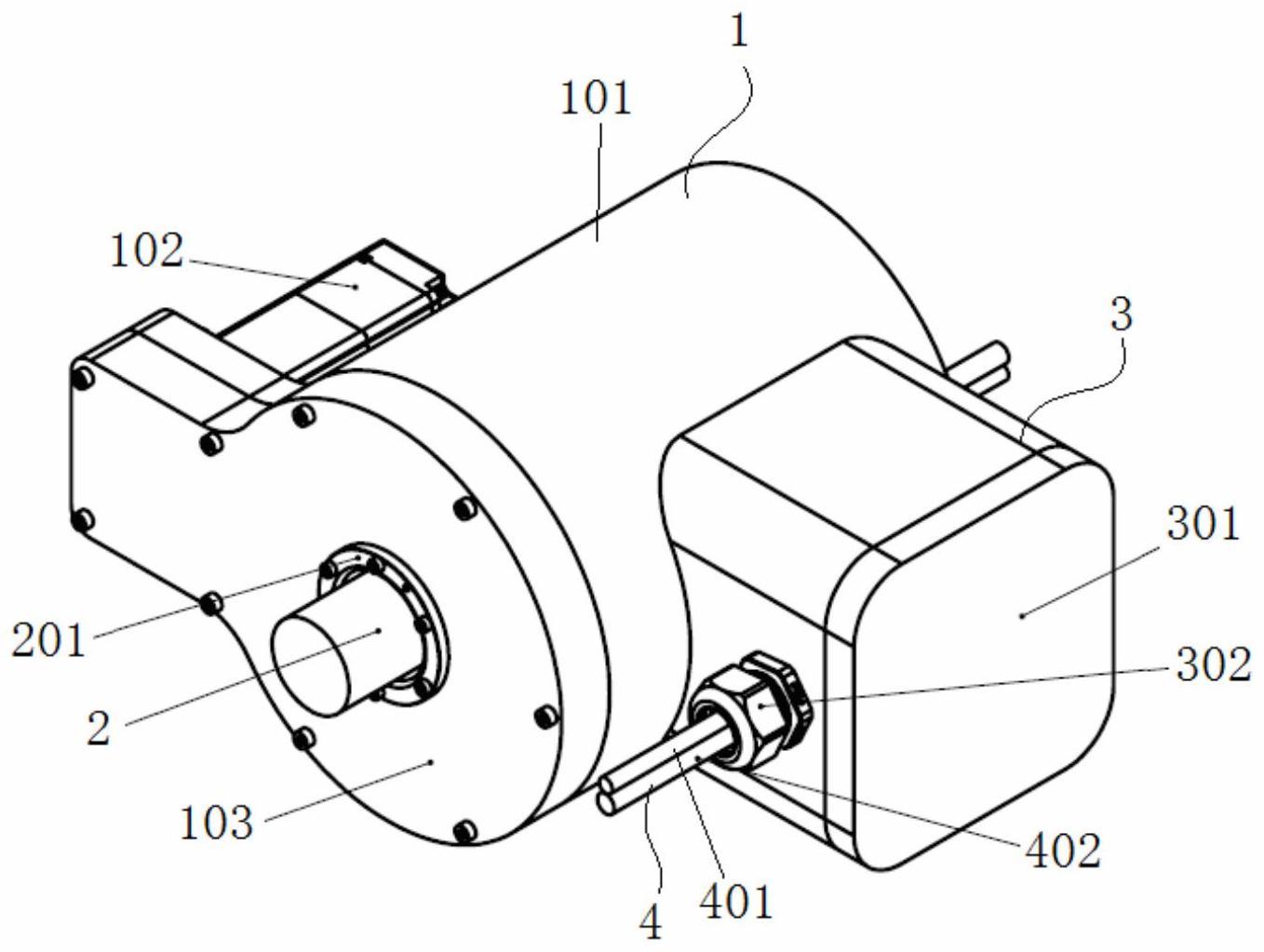
3、一种工业机器人中空关节线缆布置结构,包括关节组件、末端线缆和机器人本体线缆,其中关节组件包括关节壳体和转接驱动机构,所述转接驱动机构包括设于所述关节壳体内的中空减速器和连接套筒,且所述连接套筒自由端设有转接法兰,末端线缆依次穿过所述中空减速器、连接套筒和转接法兰,所述关节壳体一侧设有线缆容置腔,所述连接套筒外侧设有弹簧护套组件,所述转接法兰上设有线缆通孔,所述机器人本体线缆伸入所述线缆容置腔后穿入所述弹簧护套组件中,并由所述弹簧护套组件穿出后经由所述线缆通孔伸出至关节组件外。
4、所述关节组件的转接驱动机构包括电机、传动组件、中空减速器和连接套筒,所述电机输出端通过传动组件与所述中空减速器输入端相连,所述中空减速器输出端与连接套筒轴向固连,所述转接法兰通过所述连接套筒带动旋转。
5、所述传动组件包括主动带轮、传动带和从动带轮,其中主动带轮安装于所述电机的输出轴上,从动带轮安装于所述中空减速器的输入端上,且所述主动带轮与从动带轮通过所述传动带连接,所述电机设于所述关节壳体外侧,在所述关节壳体上设有安装座,且所述电机固装于所述安装座上,所述主动带轮设于所述安装座内部。
6、所述关节壳体远离所述转接法兰一侧设有关节盖板,所述转接法兰与所述关节壳体之间则设有密封圈,所述中空减速器内设有末端线缆护套,且所述末端线缆护套一端设有法兰固装于所述关节盖板上,所述末端线缆穿过所述末端线缆护套。
7、所述线缆容置腔一侧设有接头,所述机器人本体线缆经由所述接头伸入至所述线缆容置腔中。
8、所述机器人本体线缆位于所述线缆容置腔内的第一线缆段通过第一定位组件固定,所述机器人本体线缆由弹簧护套组件穿出后位于关节壳体内的第二线缆段通过第二定位组件固定。
9、所述第一定位组件包括第一固定板和第一线缆夹,其中所述第一固定板固设于所述线缆容置腔中,所述第一线缆段通过所述第一线缆夹固定于所述第一固定板上,所述第二定位组件包括第二固定板和第二线缆夹,其中所述第二固定板固设于关节壳体中,所述第二线缆段通过所述第二线缆夹固定于所述第二固定板上。
10、所述第一定位组件设有第一弹簧夹,所述第二定位组件设有第二弹簧夹,且所述弹簧护套组件输入端通过所述第一弹簧夹固定于所述第一固定板上、输出端通过所述第二弹簧夹固定于所述第二固定板上。
11、所述机器人本体线缆包括第一本体线缆和第二本体线缆,所述弹簧护套组件包括第一弹簧护套和第二弹簧护套,且所述第一本体线缆插入所述第一弹簧护套中,所述第二本体线缆插入所述第二弹簧护套中。
12、所述转接驱动机构的连接套筒外侧设有盘线护套,所述第一弹簧护套和第二弹簧护套均呈u型且对称布置于所述盘线护套两侧,所述第一弹簧护套和第二弹簧护套的输入端和输出端均位于关节壳体与线缆容置腔连接一侧。
13、本发明的优点与积极效果为:
14、1、本发明可利用转接驱动机构驱动末端装置或下一关节在±180°范围内相对转动,并且机器人本体线缆设于关节组件一侧,不影响关节转动,同时可以使关节壳体内部实现较大的中空直径,满足中空型机器人的装配要求。
15、2、本发明在关节壳体一侧设有线缆容置腔,且机器人本体线缆位于所述线缆容置腔中的第一线缆段部分通过第一定位组件固定,机器人本体线缆位于关节壳体中的第二线缆段部分通过第二定位组件固定,并且第二线缆段呈180°折弯后在关节壳体内延伸,整个线缆布局设计不仅固定牢靠,而且结构紧凑,节省安装空间。
16、3、本发明的机器人本体线缆分别插入对应的弹簧护套中在关节壳体内延伸,转动时弹簧护套组件会与关节壳体内壁以及盘线护套外侧摩擦,从而在关节转动时避免了机器人本体线缆直接与关节壳体内壁以及盘线护套外侧摩擦,提高了机器人本体线缆的使用寿命,并且弹簧护套组件的输入端和输出端同样通过第一定位组件和第二定位组件固定,固定牢靠同时结构更为紧凑,进一步节省安装空间。
17、4、本发明密封性能好,防护等级有所提高。
技术特征:
1.一种工业机器人中空关节线缆布置结构,其特征在于:包括关节组件(1)、末端线缆(2)和机器人本体线缆(4),其中关节组件(1)包括关节壳体(101)和转接驱动机构(102),所述转接驱动机构(102)包括设于所述关节壳体(101)内的中空减速器(1027)和连接套筒(1028),且所述连接套筒(1028)自由端设有转接法兰(1022),末端线缆(2)依次穿过所述中空减速器(1027)、连接套筒(1028)和转接法兰(1022),所述关节壳体(101)一侧设有线缆容置腔(3),所述连接套筒(1028)外侧设有弹簧护套组件(5),所述转接法兰(1022)上设有线缆通孔(1023),所述机器人本体线缆(4)伸入所述线缆容置腔(3)后穿入所述弹簧护套组件(5)中,并由所述弹簧护套组件(5)穿出后经由所述线缆通孔(1023)伸出至关节组件(1)外。
2.根据权利要求1所述的工业机器人中空关节线缆布置结构,其特征在于:所述关节组件(1)的转接驱动机构(102)包括电机(1021)、传动组件、中空减速器(1027)和连接套筒(1028),所述电机(1021)输出端通过传动组件与所述中空减速器(1027)输入端相连,所述中空减速器(1027)输出端与连接套筒(1028)轴向固连,所述转接法兰(1022)通过所述连接套筒(1028)带动旋转。
3.根据权利要求2所述的工业机器人中空关节线缆布置结构,其特征在于:所述传动组件包括主动带轮(1024)、传动带(1025)和从动带轮(1026),其中主动带轮(1024)安装于所述电机(1021)的输出轴上,从动带轮(1026)安装于所述中空减速器(1027)的输入端上,且所述主动带轮(1024)与从动带轮(1026)通过所述传动带(1025)连接,所述电机(1021)设于所述关节壳体(101)外侧,在所述关节壳体(101)上设有安装座,且所述电机(1021)固装于所述安装座上,所述主动带轮(1024)设于所述安装座内部。
4.根据权利要求1所述的工业机器人中空关节线缆布置结构,其特征在于:所述关节壳体(101)远离所述转接法兰(1022)一侧设有关节盖板(103),所述转接法兰(1022)与所述关节壳体(101)之间则设有密封圈(105),所述中空减速器(1027)内设有末端线缆护套(201),且所述末端线缆护套(201)一端设有法兰固装于所述关节盖板(103)上,所述末端线缆(2)穿过所述末端线缆护套(201)。
5.根据权利要求1所述的工业机器人中空关节线缆布置结构,其特征在于:所述线缆容置腔(3)一侧设有接头(302),所述机器人本体线缆(4)经由所述接头(302)伸入至所述线缆容置腔(3)中。
6.根据权利要求1所述的工业机器人中空关节线缆布置结构,其特征在于:所述机器人本体线缆(4)位于所述线缆容置腔(3)内的第一线缆段(403)通过第一定位组件(6)固定,所述机器人本体线缆(4)由弹簧护套组件(5)穿出后位于关节壳体(101)内的第二线缆段(404)通过第二定位组件(7)固定。
7.根据权利要求6所述的工业机器人中空关节线缆布置结构,其特征在于:所述第一定位组件(6)包括第一固定板(601)和第一线缆夹(602),其中所述第一固定板(601)固设于所述线缆容置腔(3)中,所述第一线缆段(403)通过所述第一线缆夹(602)固定于所述第一固定板(601)上,所述第二定位组件(7)包括第二固定板(701)和第二线缆夹(702),其中所述第二固定板(701)固设于关节壳体(101)中,所述第二线缆段(404)通过所述第二线缆夹(702)固定于所述第二固定板(701)上。
8.根据权利要求7所述的工业机器人中空关节线缆布置结构,其特征在于:所述第一定位组件(6)设有第一弹簧夹(603),所述第二定位组件(7)设有第二弹簧夹(703),且所述弹簧护套组件(5)输入端通过所述第一弹簧夹(603)固定于所述第一固定板(601)上、输出端通过所述第二弹簧夹(703)固定于所述第二固定板(701)上。
9.根据权利要求1所述的工业机器人中空关节线缆布置结构,其特征在于:所述机器人本体线缆(4)包括第一本体线缆(401)和第二本体线缆(402),所述弹簧护套组件(5)包括第一弹簧护套(501)和第二弹簧护套(502),且所述第一本体线缆(401)插入所述第一弹簧护套(501)中,所述第二本体线缆(402)插入所述第二弹簧护套(502)中。
10.根据权利要求9所述的工业机器人中空关节线缆布置结构,其特征在于:所述转接驱动机构(102)的连接套筒(1028)外侧设有盘线护套(104),所述第一弹簧护套(501)和第二弹簧护套(502)均呈u型且对称布置于所述盘线护套(104)两侧,所述第一弹簧护套(501)和第二弹簧护套(502)的输入端和输出端均位于关节壳体(101)与线缆容置腔(3)连接一侧。
技术总结
本发明涉及一种工业机器人中空关节线缆布置结构,包括关节组件、末端线缆和机器人本体线缆,其中关节组件包括关节壳体和转接驱动机构,所述转接驱动机构包括设于所述关节壳体内的中空减速器和连接套筒,且所述连接套筒自由端设有转接法兰,末端线缆依次穿过所述中空减速器、连接套筒和转接法兰,所述关节壳体一侧设有线缆容置腔,所述连接套筒外侧设有弹簧护套组件,所述转接法兰上设有线缆通孔,所述机器人本体线缆伸入所述线缆容置腔后穿入所述弹簧护套组件中,并由所述弹簧护套组件穿出后经由所述线缆通孔伸出至关节组件外。本发明不影响关节转动同时可以使关节壳体内部实现较大的中空直径,满足中空型机器人的装配要求。
技术研发人员:陈立博,孙宝龙,刘亚超,孙鹏,陈为廉,王金涛,朱维金,于伟光,刘祥,张鹤,王瑞,李宇庆
受保护的技术使用者:沈阳新松机器人自动化股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!