软体机械手及其使用方法与流程
本发明涉及机械手,特别是涉及软体机械手及其使用方法。
背景技术:
1、软体机械手是采用软质材料制造的机械手,与传统的机械手或抓具相比,操作细小或易碎物体的能力更强。然而,传统调控软体机械手抓取物体的方式主要有电刺激、气压驱动或者磁场控制,针对表面光滑的易损品、易碎品进行抓取时,不方便精确控制抓取和释放,容易造成被抓取物的损伤。
技术实现思路
1、基于此,有必要针对上述问题,提供一种软体机械手及其使用方法,所述软体机械手的抓取部的表面粗糙度能够可逆调节,采用所述软体机械手进行抓取目标物体时,通过改变红外光照时间调节软体机械手的温度,能够进一步调控软体机械手的表面粗糙度,实现对不同重量和不同表面粗糙度的易损品、易碎品的抓取和释放。
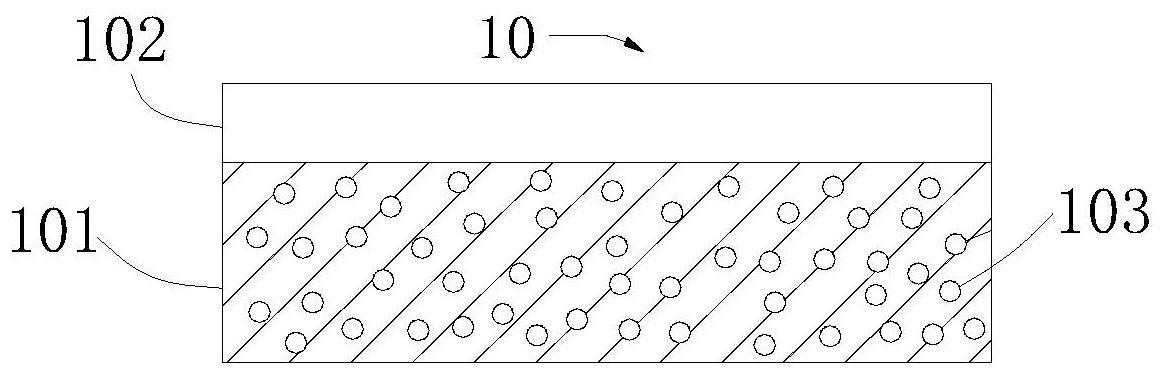
2、一种软体机械手,包括至少一个抓取部,所述抓取部包括本体以及覆设于所述本体表面的热响应层,所述本体的弹性模量小于所述热响应层的弹性模量,其中,所述本体中分布有光热转化填料,所述光热转化填料能够吸收红外光并转化成热能,所述热响应层的材料包括热响应聚合物和交联剂,所述热响应聚合物的分子链中含有呋喃基团,所述交联剂的分子链中含有马来酰亚胺基团。
3、在其中一个实施例中,所述热响应聚合物的结构式如式(1)所示:
4、
5、式(1)中,r1选自氢原子或者甲基,r2选自碳链长度为3-20的烷烃,r3选自卤素原子,x、y和z均为5000-20000的整数。
6、在其中一个实施例中,所述交联剂的结构式如式(2)或者式(3)所示:
7、
8、式(2)中,n为20-1000的整数。
9、在其中一个实施例中,所述热响应聚合物和所述交联剂的摩尔比为2:1-4:1。
10、在其中一个实施例中,所述热响应层的厚度为2mm-10mm。
11、在其中一个实施例中,所述光热转化填料对红外光的吸收率大于或等于75%。
12、在其中一个实施例中,所述光热转化填料选自石墨烯、碳纳米管或炭黑中的至少一种。
13、在其中一个实施例中,所述光热转化填料在所述本体中的质量分数为0.01%-5%。
14、在其中一个实施例中,所述本体的材料选自聚二甲基硅氧烷、聚氨酯或者己二酸丁二醇酯和对苯二甲酸丁二醇酯的共聚物。
15、一种所述软体机械手的使用方法,包括:
16、采用红外光照射所述软体机械手,使所述软体机械手的抓取部的温度达到70℃-75℃,冷却后所述抓取部中的热响应层的表面粗糙度增大,以使所述抓取部能够抓取目标物体;
17、采用红外光照射所述软体机械手,使所述软体机械手的抓取部的温度达到120℃-130℃,冷却后所述抓取部中的热响应层的表面粗糙度减小,以使所述抓取部能够释放所述目标物体。
18、本发明的软体机械手中,本体中的光热转化填料能够吸收红外光并转化为热能,对抓取部进行加热,其中,当抓取部的温度达到70℃-75℃时,热响应层中的热响应聚合物和交联剂进行交联反应,生成三维交联网络,使热响应层的模量增大,所以冷却后热响应层生成褶皱结构,使得抓取部的表面粗糙度增大,当抓取部的温度达到120℃-130℃时,热响应层中的三维交联网络进行解交联反应,使热响应层的模量下降,所以冷却后热响应层的褶皱结构消失,使得抓取部的表面粗糙度降低,甚至恢复至平整状态。
19、因此,本发明软体机械手的抓取部的表面粗糙度可以进行可逆调节,并且,可以通过加热温度进行精准调控,从而,使用本发明的软体机械手进行抓取目标物体时,可以通过控制抓取部的表面粗糙度调节抓取部与目标物体的摩擦力,实现目标物体的可控抓取和释放。进而,通过调控软体机械手的表面粗糙度,可以实现对不同重量和不同表面粗糙度的易损品、易碎品的抓取和释放,适用范围更广。
技术特征:
1.一种软体机械手,其特征在于,包括至少一个抓取部,所述抓取部包括本体以及覆设于所述本体表面的热响应层,所述本体的弹性模量小于所述热响应层的弹性模量,其中,所述本体中分布有光热转化填料,所述光热转化填料能够吸收红外光并转化成热能,所述热响应层的材料包括热响应聚合物和交联剂,所述热响应聚合物的分子链中含有呋喃基团,所述交联剂的分子链中含有马来酰亚胺基团。
2.根据权利要求1所述的软体机械手,其特征在于,所述热响应聚合物的结构式如式(1)所示:
3.根据权利要求1或2所述的软体机械手,其特征在于,所述交联剂的结构式如式(2)或者式(3)所示:
4.根据权利要求1所述的软体机械手,其特征在于,所述热响应聚合物和所述交联剂的摩尔比为2:1-4:1。
5.根据权利要求1所述的软体机械手,其特征在于,所述热响应层的厚度为2mm-10mm。
6.根据权利要求1所述的软体机械手,其特征在于,所述光热转化填料对红外光的吸收率大于或等于75%。
7.根据权利要求6所述的软体机械手,其特征在于,所述光热转化填料选自石墨烯、碳纳米管或炭黑中的至少一种。
8.根据权利要求1所述的软体机械手,其特征在于,所述光热转化填料在所述本体中的质量分数为0.01%-5%。
9.根据权利要求1所述的软体机械手,其特征在于,所述本体的材料选自聚二甲基硅氧烷、聚氨酯或者己二酸丁二醇酯和对苯二甲酸丁二醇酯的共聚物。
10.一种如权利要求1-9任一项所述软体机械手的使用方法,其特征在于,包括:
技术总结
本发明涉及一种软体机械手,包括至少一个抓取部,所述抓取部包括本体以及覆设于所述本体表面的热响应层,所述本体的弹性模量小于所述热响应层的弹性模量,其中,所述本体中分布有光热转化填料,所述热响应层的材料包括热响应聚合物和交联剂,所述热响应聚合物的分子链中含有呋喃基团,所述交联剂的分子链中含有马来酰亚胺基团。本发明还涉及一种软体机械手的使用方法。本发明软体机械手的抓取部的表面粗糙度能够可逆调节,采用所述软体机械手进行抓取目标物体时,通过改变红外光照时间调节软体机械手的温度,能够进一步调控软体机械手的表面粗糙度,实现对不同重量和不同表面粗糙度的易损品、易碎品的抓取和释放。
技术研发人员:冯雪,刘兰兰,陈颖
受保护的技术使用者:浙江清华柔性电子技术研究院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!