一种3D视觉引导机械手无序抓取系统的制作方法
一种3d视觉引导机械手无序抓取系统
技术领域
1.本实用新型涉及自动化加工领域,具体地,涉及一种3d视觉引导系统。
背景技术:
2.当今生产的趋势是自动化加工(机械手)取代人工操作,目前已有很多技术赋予机械手以人的感知功能,尤其视觉方面。然而产品工件类型多种多样,在不同应用场景下,需使用适合于当前场景的视觉引导系统,才能使自动化生产更加高效。
技术实现要素:
3.本发明的目的在于提供一种主要用于整理码放小型圆筒状零件的3d视觉引导机械手无序抓取系统。
4.所采取的技术方案:一种3d视觉引导机械手无序抓取系统,包括操作平台、机械手、相机模块和通信模块。
5.所述操作平台包括机械手平台和工作平台,所述机械手平台包括机械手箱和机械手台面(即箱体上表面)。
6.所述机械手台面上一角设有放料位;其余空间为机械手动作空间,无障碍物;
7.所述机械手箱用于放置机械手底座及机械手控制器,机械手箱上表面开2个孔,一个孔用于连接机械手底座和机械手固定轴,机械手箱箱体高度与(机械手底座和机械手固定轴)连接面齐平;另一个孔布置真空气爪气管。这样布置的理由是,若底座太高,露出台面不好看,若底座太矮,低于台面,会影响固定轴安装。
8.所述机械手平台可以是2个或2个以上。
9.所述工作平台包括控制器箱、工件台面、工件盒和相机支架。
10.所述控制器箱用于放置电源、气管、工控机、相机控制器和标定工具。所述标定工具包括相机标定板和机械手标定板。
11.所述控制器箱和机械手箱设有相对的孔洞,用于布置机械手电路、气路和信号通道。这样布置的理由是,线路全部在箱子里,外观整齐。
12.所述工件台面优选1000*1000*10(厚)(单位mm)铁板,台面加工水平(方向)精度<0.05mm。
13.所述工件台面高度与机械手台面一致,所述工件台面上设有工件盒,所述工件台面四角切出l型缺口,用于设置相机支架。
14.所述相机支架为四根立柱和一组顶部横梁,所述顶部横梁用于设置相机。
15.所述立柱优选间距1m,呈正方形排布。立柱截面优选与工件台面l型缺口一致,立柱设置在缺口内,组成1m*1m截面。
16.所述立柱底部设置地脚调节螺丝,所述地脚调节螺丝用于调节工件台面和顶部横梁水平度,优选精度<0.02mm。
17.所述立柱与横档、盖板组成控制器箱。
18.所述机械手优选使用欧拉角坐标系和真空夹爪的六轴机械手。真空夹爪体积小、灵活,适合伸进工件盒。
19.所述相机模块包括4个相机镜头、1个投影光源和相机控制器。
20.所述光源垂直向下设置。
21.所述镜头排布在以光源为正方形中心点的正方形顶点上。
22.所述镜头与光源呈锐角设置,不是平行设置,四个镜头拍摄角度汇聚。
23.相机模块布置高度、镜头间距和角度决定了相机拍摄范围。所述相机拍摄范围一般小于工件台面,大于工件盒。可以在拍摄范围内布置多个工件盒。
24.检测原理:双轴条纹模式投影。
25.本实用新型的有益效果在于:功能上,尤其适合整理码放小型圆筒状零件;结构上,外观整齐实用;原理上,通过对方向差异为90度的投影模式进行投影和分析。可减轻金属光泽带来的多重反射的影响,减少识别误差。
附图说明
26.为了更清楚地说明本实用新型的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一个实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
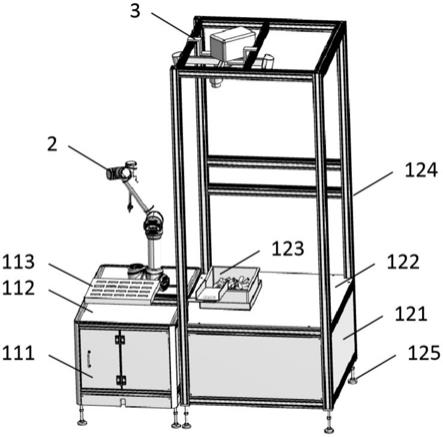
27.图1为本实用新型一种3d视觉引导机械手无序抓取系统的立体图;
28.其中,1、操作平台;2、机械手;3、相机模块;111、机械手箱;112、机械手台面;113、放料位;121、控制器箱;122、工件台面;123、工件盒;124、相机支架;125、地脚调节螺丝。
具体实施方式
29.为使本实用新型的目的、技术方案及优点更加清楚、明确,以下参照附图并举实施例对本实用新型进一步详细说明。
30.如图1所示,一种3d视觉引导机械手无序抓取系统,包括操作平台1、机械手2、相机模块3和通信模块(图中未示出)。
31.所述操作平台1包括机械手平台和工作平台,所述机械手平台包括机械手箱111和机械手台面112(即机械手箱111上表面)。
32.所述机械手台面112上一角设有放料位113;其余空间为机械手动作空间,无障碍物。
33.所述机械手箱111用于放置机械手底座及机械手控制器,机械手箱111上表面开2个孔,一个孔用于连接机械手底座和机械手固定轴,机械手箱箱体高度与机械手底座和机械手固定轴连接面齐平;另一个孔布置真空气爪气管。
34.所述工作平台包括控制器箱121、工件台面122、工件盒123和相机支架124。
35.所述控制器箱121用于放置电源、气管、工控机、相机控制器和标定工具。所述标定工具包括相机标定板和机械手标定板。
36.所述控制器箱121和机械手箱111设有相对的孔洞,用于布置机械手电路、气路和信号通道。
37.所述工件台面122优选1000*1000*10(厚)(单位mm)铁板,台面加工水平(方向)精度<0.05mm。
38.所述工件台面122高度与机械手台面112一致,所述工件台面122上设有工件盒123,所述工件台面122四角切出l型缺口,用于设置相机支架124。
39.所述相机支架124为四根立柱和一组顶部横梁,所述顶部横梁用于设置相机。
40.所述立柱优选间距1m,呈正方形排布。立柱截面优选与工件台面l型缺口一致,立柱设置在缺口内,组成1m*1m截面。
41.所述立柱底部设置地脚调节螺丝125,所述地脚调节螺丝125用于调节工件台面122和顶部横梁水平度,优选精度<0.02mm。
42.所述立柱与横档、盖板组成控制器箱121。
43.所述机械手2为使用欧拉角坐标系和真空夹爪的六轴机械手。
44.所述相机模块3包括4个相机镜头、1个投影光源和相机控制器。
45.所述光源垂直向下设置。
46.所述镜头排布在以光源为正方形中心点的正方形顶点上。
47.所述镜头与光源呈锐角设置,不是平行设置,四个镜头拍摄角度汇聚。
技术特征:
1.一种3d视觉引导机械手无序抓取系统,包括操作平台(1)、机械手(2)、相机模块(3)和通信模块,其特征在于:所述操作平台(1)包括机械手平台和工作平台,所述机械手平台包括机械手箱(111)和机械手台面(112),所述机械手台面(112)上设有放料位(113),所述机械手箱(111)用于放置机械手底座及机械手控制器;所述工作平台包括控制器箱(121)、工件台面(122)、工件盒(123)和相机支架(124),所述工件台面(122)上设有工件盒(123),所述工件台面(122)与相机支架(124)连接,所述相机支架(124)用于设置相机。2.根据权利要求1所述的3d视觉引导机械手无序抓取系统,其特征在于:所述机械手箱(111)上表面开2个孔,一个孔用于连接机械手底座和机械手固定轴,另一个孔布置真空气爪气管。3.根据权利要求1所述的3d视觉引导机械手无序抓取系统,其特征在于:控制器箱(121)用于放置电源、气管、工控机、相机控制器和标定工具,所述标定工具包括相机标定板和机械手标定板。4.根据权利要求1所述的3d视觉引导机械手无序抓取系统,其特征在于:所述控制器箱(121)和机械手箱(111)设有相对的孔洞,用于布置机械手电路、气路和信号通道。5.根据权利要求1所述的3d视觉引导机械手无序抓取系统,其特征在于:所述工件台面(122)为1000*1000*10mm铁板,台面加工水平精度<0.05mm。6.根据权利要求1所述的3d视觉引导机械手无序抓取系统,其特征在于:所述工件台面(122)四角切出l型缺口,用于设置相机支架(124),所述相机支架(124)为四根立柱和一组顶部横梁,所述顶部横梁用于设置相机。7.根据权利要求6所述的3d视觉引导机械手无序抓取系统,其特征在于:所述立柱间距1m,呈正方形排布,立柱截面与工件台面(122)l型缺口一致,立柱设置在缺口内,组成1m*1m截面。8.根据权利要求7所述的3d视觉引导机械手无序抓取系统,其特征在于:所述立柱底部设置地脚调节螺丝(125),所述地脚调节螺丝(125)用于调节工件台面(122)和顶部横梁水平度。9.根据权利要求1所述的3d视觉引导机械手无序抓取系统,其特征在于:所述机械手(2)为使用欧拉角坐标系和真空夹爪的六轴机械手。10.根据权利要求1所述的3d视觉引导机械手无序抓取系统,其特征在于:所述相机模块(3)包括4个相机镜头、1个投影光源和相机控制器,所述光源垂直向下设置,所述镜头排布在以光源为正方形中心点的正方形顶点上,所述镜头与光源呈锐角设置,四个镜头拍摄角度汇聚。
技术总结
一种3D视觉引导机械手无序抓取系统,包括操作平台(1)、机械手(2)、相机模块(3)和通信模块,所述操作平台(1)包括机械手平台和工作平台,所述机械手平台包括机械手箱(111)和机械手台面(112),所述机械手台面(112)上设有放料位(113),所述机械手箱(111)用于放置机械手底座及机械手控制器;所述工作平台包括控制器箱(121)、工件台面(122)、工件盒(123)和相机支架(124),所述工作台面(122)上设有工件盒(123),所述工件台面(122)与相机支架(124)连接,所述相机支架(124)用于设置相机。相机支架(124)用于设置相机。相机支架(124)用于设置相机。
技术研发人员:桑原康宏
受保护的技术使用者:常熟希那基汽车零件有限公司
技术研发日:2021.01.06
技术公布日:2021/12/10
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1