一种用于单相电能表的机器人上料纠正夹爪装置的制作方法
1.本实用新型涉及电能表机器人上料技术领域,尤其涉及一种用于单相电能表的机器人上料纠正夹爪装置。
背景技术:
2.电能表机器人上料是电能表检测流水线中一个重要环节,其中机器人上料纠正夹爪在电能表检测流水线机器人上料初始阶段起到了至关重要的作用,用于纠正电能表在来料过程中因为外部原因导致电能表在纸箱内的偏差位置,因此机器人上料纠正夹爪装置为电能表检测流水线带来了很大的便利,并且大大提升了电能表检测流水线电能表上料的效率,而且美观实用。目前,传统的电能表机器人上料采用吸盘固定式上料,此方式不灵活,不能进行电能表位置纠正,在上料时遇到有位置偏差的电能表时,会出现上料不合格现象,需要工作人员介入进行操作调整。因此,设计一种用于单相电能表的机器人上料纠正夹爪装置是有必要的。
技术实现要素:
3.本实用新型为克服上述的不足之处,目的在于提供一种用于单相电能表的机器人上料纠正夹爪装置,本实用新型可实现电能表全自动化流水线操作,减少工作人员的运维时间,提高电能表流水线生产效率和生产合格率。
4.本实用新型是通过以下技术方案达到上述目的:一种用于单相电能表的机器人上料纠正夹爪装置,包括垫高块、安装板、气爪、海绵吸盘i、海绵吸盘ii、吸盘安装板i、气缸安装板、气缸、海绵吸盘iii、吸盘安装板ii、负压表、传感器;所述的海绵吸盘i和海绵吸盘iii通过螺栓固定在吸盘安装板ii上;所述的海绵吸盘ii通过螺丝固定在吸盘安装板i上;所述的吸盘安装板i与气缸连接,气缸通过光轴与气缸安装板连接,带动海绵吸盘ii运动;气缸安装板、吸盘安装板ii分别与安装板相连接;安装板与垫高块通过螺栓与外部机器人相连接;所述的气爪通过螺丝固定在安装板上;所述的负压表、传感器分别固定在吸盘安装板ii上。
5.作为优选,所述的吸盘安装板i通过直线轴承和光轴与气缸连接。
6.作为优选,所述的气缸安装板、吸盘安装板ii分别通过光轴与安装板相连接。
7.作为优选,所述的海绵吸盘i、海绵吸盘ii、海绵吸盘iii采用型号为txc60*120的海绵吸盘。
8.作为优选,所述的气缸采用亚德客国际集团的型号为pb16x75sufa的气缸。
9.作为优选,所述的负压表采用亚德客国际集团的型号为dpsn1
‑
01020的负压表。
10.作为优选,所述的传感器采用西克传感器有限公司的型号为gte6
‑
p1211/pn的传感器。
11.作为优选,所述的气爪采用ckd集团的型号为bha
‑
05cs1
‑
t2v
‑
d的气爪。
12.本实用新型的有益效果在于:本实用新型结构简单,可以实现电能表全自动化流
水线操作,减少工作人员的运维时间,提高电能表流水线生产效率和生产合格率。
附图说明
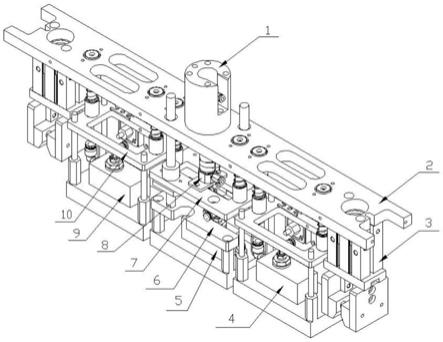
13.图1是本实用新型的结构示意图1;
14.图2是本实用新型的结构示意图2;
15.图3是本实用新型使用时的工作状态示意图;
16.图4是本实用新型的单相电能表结构示意图;
17.图5是本实用新型的单相电能表纸箱结构示意图。
具体实施方式
18.下面结合具体实施例对本实用新型进行进一步描述,但本实用新型的保护范围并不仅限于此:
19.实施例:如图1、图2所示,一种用于单相电能表的机器人上料纠正夹爪装置具体由垫高块1、安装板2、气爪3、海绵吸盘i4、海绵吸盘ii5、吸盘安装板i6、气缸安装板7、气缸8、海绵吸盘iii9、吸盘安装板ii10、负压表11、传感器12组成。
20.海绵吸盘i4和海绵吸盘iii9通过螺栓固定在吸盘安装板ii10上;海绵吸盘ii5通过螺丝固定在吸盘安装板i6上;吸盘安装板i6通过直线轴承和光轴与气缸8连接,气缸8通过光轴与气缸安装板7连接,带动海绵吸盘ii5运动;气缸安装板7、吸盘安装板ii10分别通过光轴与安装板2相连接;安装板2与垫高块1通过螺栓与外部机器人相连接;气爪3通过螺丝固定在安装板2上;负压表11、传感器12分别固定在吸盘安装板ii10上。其中,海绵吸盘i4、海绵吸盘ii5、海绵吸盘iii9采用型号为txc60*120的海绵吸盘。气缸8采用亚德客国际集团的型号为pb16x75sufa的气缸。负压表11采用亚德客国际集团的型号为dpsn1
‑
01020的负压表。传感器12采用西克传感器有限公司的型号为gte6
‑
p1211/pn的传感器。气爪3采用ckd集团的型号为bha
‑
05cs1
‑
t2v
‑
d的气爪。
21.本实用新型使用时,如图3、图4、图5所示,通过机器人驱动,本实用新型对单相电能表13进行纠正和上料,单相电能表13在单相电能表纸箱14中,通过气缸8动作带动海绵吸盘ii5进行纠正,纠正完成后通过海绵吸盘i4、海绵吸盘ii5、海绵吸盘iii9吸取,完成单相电能表13的上料。
22.以上的所述乃是本实用新型的具体实施例及所运用的技术原理,若依本实用新型的构想所作的改变,其所产生的功能作用仍未超出说明书及附图所涵盖的精神时,仍应属本实用新型的保护范围。
技术特征:
1.一种用于单相电能表的机器人上料纠正夹爪装置,其特征在于,包括垫高块(1)、安装板(2)、气爪(3)、海绵吸盘i(4)、海绵吸盘ii(5)、吸盘安装板i(6)、气缸安装板(7)、气缸(8)、海绵吸盘iii(9)、吸盘安装板ii(10)、负压表(11)、传感器(12);所述的海绵吸盘i(4)和海绵吸盘iii(9)通过螺栓固定在吸盘安装板ii(10)上;所述的海绵吸盘ii(5)通过螺丝固定在吸盘安装板i(6)上;所述的吸盘安装板i(6)与气缸(8)连接,气缸(8)通过光轴与气缸安装板(7)连接,带动海绵吸盘ii(5)运动;气缸安装板(7)、吸盘安装板ii(10)分别与安装板(2)相连接;安装板(2)与垫高块(1)通过螺栓与外部机器人相连接;所述的气爪(3)通过螺丝固定在安装板(2)上;所述的负压表(11)、传感器(12)分别固定在吸盘安装板ii(10)上。2.根据权利要求1所述的一种用于单相电能表的机器人上料纠正夹爪装置,其特征在于:所述的吸盘安装板i(6)通过直线轴承和光轴与气缸(8)连接。3.根据权利要求1所述的一种用于单相电能表的机器人上料纠正夹爪装置,其特征在于:所述的气缸安装板(7)、吸盘安装板ii(10)分别通过光轴与安装板(2)相连接。4.根据权利要求1所述的一种用于单相电能表的机器人上料纠正夹爪装置,其特征在于:所述的海绵吸盘i(4)、海绵吸盘ii(5)、海绵吸盘iii(9)采用型号为txc60*120的海绵吸盘。5.根据权利要求1所述的一种用于单相电能表的机器人上料纠正夹爪装置,其特征在于:所述的气缸(8)采用亚德客国际集团的型号为pb16x75sufa的气缸。6.根据权利要求1所述的一种用于单相电能表的机器人上料纠正夹爪装置,其特征在于:所述的负压表(11)采用亚德客国际集团的型号为dpsn1
‑
01020的负压表。7.根据权利要求1所述的一种用于单相电能表的机器人上料纠正夹爪装置,其特征在于:所述的传感器(12)采用西克传感器有限公司的型号为gte6
‑
p1211/pn的传感器。8.根据权利要求1所述的一种用于单相电能表的机器人上料纠正夹爪装置,其特征在于:所述的气爪(3)采用ckd集团的型号为bha
‑
05cs1
‑
t2v
‑
d的气爪。
技术总结
本实用新型涉及一种用于单相电能表的机器人上料纠正夹爪装置,包括垫高块、安装板、气爪、海绵吸盘I、海绵吸盘II、吸盘安装板I、气缸安装板、气缸、海绵吸盘III、吸盘安装板II、负压表、传感器;本实用新型结构简单,可以实现电能表全自动化流水线操作,减少工作人员的运维时间,提高电能表流水线生产效率和生产合格率。提高电能表流水线生产效率和生产合格率。提高电能表流水线生产效率和生产合格率。
技术研发人员:许波 李云水 吴鹏程 苏堂武 尤左泼
受保护的技术使用者:杭州德创电子股份有限公司
技术研发日:2021.03.08
技术公布日:2021/11/2
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1