机器人智能上下料工作站的制作方法
1.本实用新型涉及一种自动上下料的机械设备,尤其涉及一种机器人智能上下料工作站。
背景技术:
2.目前,机械行业上下料方式主要有人工上下料和振动盘上下料。人工上下料是在自动化未普及之前最为常用的上下料方式,在未出现用工荒和人工费低廉的情况下具有一定的优势,传统振动盘只能应用于电子零件加工设备,电子元器件及五金小零件自动上料且复用性差,噪音大。
技术实现要素:
3.本实用新型所要解决的技术问题是提供一种中间环节少、上下料完全由机器人完成的机器人智能上下料工作站。
4.为解决上述技术问题,本实用新型的技术方案是:机器人智能上下料工作站,包括位于工件输送线体上下料端口外侧的上下料机器人,所述上下料机器人的操作臂端部安装有电磁夹具,所述电磁夹具的一侧安装有3d视觉识别装置,所述上下料机器人两侧的作业范围内设置有多个货物存放架;
5.还包括与3d视觉识别装置的信号输出端连接的计算机,所述计算机的信号输出端连接有plc控制器,所述plc控制器的信号输出端与所述上下料机器人的存储器连接。
6.作为一种优选的技术方案,所述上下料机器人包括一台六轴工业机器人。
7.作为一种优选的技术方案,所述3d视觉识别装置包括安装在所述电磁夹具一侧的视觉识别座,所述视觉识别座上安装有高清摄像头。
8.作为一种优选的技术方案,所述计算机的信号输出端通过以太网与所述plc控制器连接。
9.作为一种优选的技术方案,所述工件输送线体的一侧设置有将所述上下料机器人和所述货物存放架圈围起来的三面安全护栏,所述安全护栏上至少设置有一个安全门。
10.由于采用了上述技术方案,机器人智能上下料工作站,包括位于工件输送线体上下料端口外侧的上下料机器人,所述上下料机器人的操作臂端部安装有电磁夹具,所述电磁夹具的一侧安装有3d视觉识别装置,所述上下料机器人两侧的作业范围内设置有多个货物存放架;还包括与3d视觉识别装置的信号输出端连接的计算机,所述计算机的信号输出端连接有plc控制器,所述plc控制器的信号输出端与所述上下料机器人的存储器连接;利用3d视觉识别装置采取产品的标准图像并预存在计算机内,工作时,3d视觉识别装置实时采集的图像输送给计算机,利用视觉软件的图像分析工具,将目标产品所取得的图像与标准图像进行比较,精确计算出尺寸偏差值;计算机将偏差值送到plc的存储器中,经过plc换算成上下料机器人能识别的修正值,传送到上下料机器人的存储器中,上下料机器人根据修正值对原装配点进行补偿修正后实施对工件的自动上下料。
附图说明
11.以下附图仅旨在于对本实用新型做示意性说明和解释,并不限定本实用新型的范围。其中:
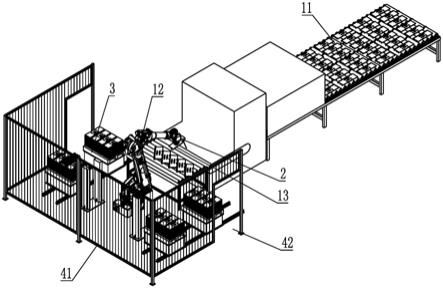
12.图1是本实用新型实施例的结构示意图;
13.图2是本实用新型实施例的俯视图;
14.图中:11
‑
工件输送线体;12
‑
上下料机器人;13
‑
电磁夹具;2
‑
3d视觉识别装置;3
‑
货物存放架;41
‑
安全护栏;42
‑
安全门。
具体实施方式
15.下面结合附图和实施例,进一步阐述本实用新型。在下面的详细描述中,只通过说明的方式描述了本实用新型的某些示范性实施例。毋庸置疑,本领域的普通技术人员可以认识到,在不偏离本实用新型的精神和范围的情况下,可以用各种不同的方式对所描述的实施例进行修正。因此,附图和描述在本质上是说明性的,而不是用于限制权利要求的保护范围。
16.如图1和图2所示,机器人智能上下料工作站,包括位于工件输送线体11上下料端口外侧的上下料机器人12,所述上下料机器人12的操作臂端部安装有电磁夹具13,所述电磁夹具13的一侧安装有3d视觉识别装置2,所述上下料机器人12两侧的作业范围内设置有多个货物存放架3;还包括与3d视觉识别装置2的信号输出端连接的计算机(图中未示出),所述计算机的信号输出端连接有plc控制器(图中未示出),所述plc控制器的信号输出端与所述上下料机器人12的存储器连接。
17.现在市场上电磁夹具13的种类很多,针对不同类型的产品,对应设置不同结构的电磁夹具13,任何能够装配到上下料机器人12上且与夹取的产品结构匹配的电磁夹具13均可以使用,由于电磁夹具13是现有技术,所以对于其具体结构和工作原理,这里不再赘述。
18.所述上下料机器人12包括一台六轴工业机器人。所述3d视觉识别装置2包括安装在所述电磁夹具13一侧的视觉识别座,所述视觉识别座上安装有高清摄像头。
19.所述计算机的信号输出端通过以太网与所述plc控制器连接。所述工件输送线体11的一侧设置有将所述上下料机器人12和所述货物存放架3圈围起来的三面安全护栏41,所述安全护栏41上至少设置有一个安全门42。
20.利用3d视觉识别装置2的高清摄像头获取产品的标准图像并预存在计算机内,工作时,3d视觉识别装置2的高清摄像头不断采取图像数据保证产品位置的精确定位,高清摄像头将采集的图像输送给计算机,利用视觉软件的图像分析工具,将目标产品所取得的图像与标准图像进行比较,精确计算出尺寸偏差值;计算机将尺寸偏差值放入计算机的存储器内,并通过以太网将偏差值送到plc控制器的存储器中,经过plc换算成上下料机器人12能识别的修正值,传送到上下料机器人12的存储器中,上下料机器人12根据修正值对原装配点进行补偿修正后实施对工件的自动上下料。
21.利用本装置在对加工中心上下料过程中,3d视觉识别装置2可识别工件位置,上下料机器人12运行作业程序,本装置从上料、装夹、下料完全由机器人完成,减少了中间环节,零件质量大大提高,特别是工件表面更美观,同时品质的稳定性得到了保障。
22.以上显示和描述了本实用新型的基本原理、主要特征及本实用新型的优点。本行
业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
技术特征:
1.机器人智能上下料工作站,其特征在于:包括位于工件输送线体上下料端口外侧的上下料机器人,所述上下料机器人的操作臂端部安装有电磁夹具,所述电磁夹具的一侧安装有3d视觉识别装置,所述上下料机器人两侧的作业范围内设置有多个货物存放架;还包括与3d视觉识别装置的信号输出端连接的计算机,所述计算机的信号输出端连接有plc控制器,所述plc控制器的信号输出端与所述上下料机器人的存储器连接。2.如权利要求1所述的机器人智能上下料工作站,其特征在于:所述上下料机器人包括一台六轴工业机器人。3.如权利要求1所述的机器人智能上下料工作站,其特征在于:所述3d视觉识别装置包括安装在所述电磁夹具一侧的视觉识别座,所述视觉识别座上安装有高清摄像头。4.如权利要求1所述的机器人智能上下料工作站,其特征在于:所述计算机的信号输出端通过以太网与所述plc控制器连接。5.如权利要求1至4任一权利要求所述的机器人智能上下料工作站,其特征在于:所述工件输送线体的一侧设置有将所述上下料机器人和所述货物存放架圈围起来的三面安全护栏,所述安全护栏上至少设置有一个安全门。
技术总结
本实用新型公开了一种机器人智能上下料工作站,包括上下料机器人,上下料机器人的操作臂端部安装有电磁夹具,电磁夹具的一侧安装有3D视觉识别装置,上下料机器人两侧设置有多个货物存放架;还包括与3D视觉识别装置的信号输出端连接的计算机,计算机的信号输出端连接有PLC控制器,PLC控制器的信号输出端与上下料机器人的存储器连接;3D视觉识别装置实时采集的图像输送给计算机,将图像与标准图像进行比较,精确计算出尺寸偏差值;计算机将偏差值送到PLC的存储器中,经过PLC换算成上下料机器人能识别的修正值,传送到上下料机器人的存储器中,上下料机器人根据修正值对原装配点进行补偿修正后实施对工件的自动上下料。偿修正后实施对工件的自动上下料。偿修正后实施对工件的自动上下料。
技术研发人员:刘立献 赵存宏 张开磊 郝彦君
受保护的技术使用者:山东中环联科机电科技有限公司
技术研发日:2021.04.15
技术公布日:2021/11/9
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1