一种视觉抓取机器人用夹具的制作方法
1.本实用新型涉及视觉机器人技术领域,特别涉及一种视觉抓取机器人用夹具。
背景技术:
2.机器人视觉,是指不仅要把视觉信息作为输入,而且还要对这些信息进行处理,进而提取出有用的信息提供给机器人。通常机器人判断物体位置和形状需要两类信息,即距离信息和明暗信息。当然作为物体视觉信息来说,还有色彩信息,但它对物体的位置和形状识别不如前两类信息重要。机器人视觉系统对光线的依赖性很大,往往需要好的照明条件,以便使物体所形成的图像最为清晰,检测信息增强,克服阴影、低反差、镜反射等问题。
3.视觉抓取机器人最终要的部件就是机械臂,机械臂是指高精度,多输入多输出、高度非线性、强耦合的复杂系统。因其独特的操作灵活性,已在工业装配,安全防爆等领域得到广泛应用,机械臂的端部往往会安装夹具,以对物品进行抓取,机械臂往往一臂多用,需要经常安装拆卸夹具,而现有的夹具往往结构复杂,安装拆卸步骤繁琐,操作使用不方便。
技术实现要素:
4.针对现有技术中的上述不足,本实用新型提供了一种视觉抓取机器人用夹具。
5.为了达到上述实用新型目的,本实用新型采用的技术方案为:一种视觉抓取机器人用夹具,包括相对设置的连接板一和连接板二,所述连接板一和连接板二之间连接设有液压缸,所述液压缸的活塞杆端穿过连接板二,所述连接板一远离连接板二的侧壁上下两侧分别通过滑槽滑动设有移动块,所述移动块远离连接板一的侧壁上设有夹板一,所述连接板一上设有用于驱动移动块上下移动的驱动机构,所述连接板二的上下两侧侧壁分别铰接设有曲形杆,所述曲形杆的另一端连接设有夹板二,所述液压缸的活塞杆端上下侧壁分别铰接设有连接杆,两个所述连接杆的另一端分别与两个曲形杆铰接。
6.作为改进:所述驱动机构包括设置在连接板一远离连接板二的侧壁上侧的电机,所述电机轴端连接设有丝杆一,所述丝杆一的另一端配合穿过其中一个移动块并连接设有联轴器,所述联轴器的另一端连接设有丝杆二,所述丝杆二的另一端配合穿过另一个移动块并配合设有丝杆座,所述丝杆座与连接板一远离连接板二的侧壁焊接固定,所述丝杆一与丝杆二的螺纹方向相反。
7.作为改进:所述夹板一为弧形夹板,两个所述夹板一的圆心均位于两个夹板一之间。
8.作为改进:两个所述夹板一的相对内侧侧壁上分别设有橡胶垫片一。
9.作为改进:两个所述夹板二的相对内侧侧壁上分别设有橡胶垫片二。
10.本实用新型与现有技术相比优点在于:将机械臂的端部置于两个夹板一之间,通过驱动机构驱动两个移动块相互靠近,能够带动两个夹板一相互靠近,从而使两个夹板一夹紧机械臂端部进行固定,控制液压缸活塞杆伸长,在连接杆的作用下,两个曲形杆会逐渐张开,两个夹板二相互远离,控制机械臂移动使物品位于两个夹板二之间,控制液压缸活塞
杆缩短,两个曲形杆会逐渐紧闭,两个夹板二相互靠近,从而夹持住物品;当机械臂不需要用到本装置时,只需要通过驱动装置驱动两个移动块相互远离,能够带动两个夹板一相互远离,即可将本装置从机械臂上轻松取下;安装拆卸方便,使用操作简单。
附图说明
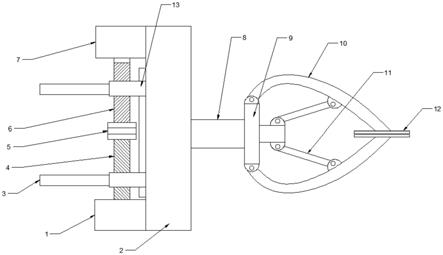
11.图1为本实用新型一种视觉抓取机器人用夹具的主视结构示意图;
12.附图标记对照表:
[0013]1‑
丝杆座、2
‑
连接板一、3
‑
夹板一、4
‑
丝杆二、5
‑
联轴器、6
‑
丝杆一、7
‑
电机、8
‑
液压缸、9
‑
连接板二、10
‑
曲形杆、11
‑
连接杆、12
‑
夹板二、13
‑
移动块。
具体实施方式
[0014]
下面结合附图来进一步说明本实用新型的具体实施方式。
[0015]
如图1所示,一种视觉抓取机器人用夹具,包括相对设置的连接板一2和连接板二9,所述连接板一2和连接板二9之间连接设有液压缸8,所述液压缸8的活塞杆端穿过连接板二9,所述连接板一2远离连接板二9的侧壁上下两侧分别通过滑槽滑动设有移动块13,所述移动块13远离连接板一2的侧壁上设有夹板一3,所述连接板一2上设有用于驱动移动块13上下移动的驱动机构,所述连接板二9的上下两侧侧壁分别铰接设有曲形杆10,所述曲形杆10的另一端连接设有夹板二12,所述液压缸8的活塞杆端上下侧壁分别铰接设有连接杆11,两个所述连接杆11的另一端分别与两个曲形杆10铰接。
[0016]
所述驱动机构包括设置在连接板一2远离连接板二9的侧壁上侧的电机7,所述电机7轴端连接设有丝杆一6,所述丝杆一6的另一端配合穿过其中一个移动块13并连接设有联轴器5,所述联轴器5的另一端连接设有丝杆二4,所述丝杆二4的另一端配合穿过另一个移动块13并配合设有丝杆座1,所述丝杆座1与连接板一2远离连接板二9的侧壁焊接固定,所述丝杆一6与丝杆二4的螺纹方向相反。
[0017]
所述夹板一3为弧形夹板,两个所述夹板一3的圆心均位于两个夹板一3之间。
[0018]
两个所述夹板一3的相对内侧侧壁上分别设有橡胶垫片一。
[0019]
两个所述夹板二12的相对内侧侧壁上分别设有橡胶垫片二。
[0020]
本实用新型在具体实施时,将机械臂的端部置于两个夹板一3之间,通过启动电机7带动丝杆一6旋转,在联轴器5的作用下,带动丝杆二4同时旋转,从而驱动两个移动块13相互靠近,带动两个夹板一3相互靠近,将机械臂夹紧固定住,控制液压缸8的活塞杆伸长,在连接杆11的作用下,两个曲形杆10会逐渐分开,带动两个夹板二12逐渐分开,控制机械臂移动使待夹持物品位于两个夹板二12之间,控制液压缸8活塞杆缩短,在连接杆11的作用下,两个曲形杆10会逐渐靠近,带动两个夹板二12逐渐靠近将物品夹紧;通过橡胶垫片一的作用,可以防止夹板一3夹紧机械臂时,对机械臂表面造成磨损,同时还可以增大与机械臂表面之间的摩擦力,通过橡胶垫片二的作用,可以防止夹板二12夹紧物品时,对物品表面造成磨损,同时还可以增大与物品表面之间的摩擦力;当不需要使用本装置时,控制电机7反转,带动丝杆一6反转,在联轴器5的作用下,带动丝杆二4同时反转,从而驱动两个移动块13相互远离,带动两个夹板一3相互远离,即可轻松将本装置从机械臂上取下。
[0021]
以上所述仅为本实用新型专利的较佳实施例而已,并不用以限制本实用新型专
利,凡在本实用新型专利的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型专利的保护范围之内。
技术特征:
1.一种视觉抓取机器人用夹具,包括相对设置的连接板一(2)和连接板二(9),其特征在于:所述连接板一(2)和连接板二(9)之间连接设有液压缸(8),所述液压缸(8)的活塞杆端穿过连接板二(9),所述连接板一(2)远离连接板二(9)的侧壁上下两侧分别通过滑槽滑动设有移动块(13),所述移动块(13)远离连接板一(2)的侧壁上设有夹板一(3),所述连接板一(2)上设有用于驱动移动块(13)上下移动的驱动机构,所述连接板二(9)的上下两侧侧壁分别铰接设有曲形杆(10),所述曲形杆(10)的另一端连接设有夹板二(12),所述液压缸(8)的活塞杆端上下侧壁分别铰接设有连接杆(11),两个所述连接杆(11)的另一端分别与两个曲形杆(10)铰接。2.根据权利要求1所述的一种视觉抓取机器人用夹具,其特征在于:所述驱动机构包括设置在连接板一(2)远离连接板二(9)的侧壁上侧的电机(7),所述电机(7)轴端连接设有丝杆一(6),所述丝杆一(6)的另一端配合穿过其中一个移动块(13)并连接设有联轴器(5),所述联轴器(5)的另一端连接设有丝杆二(4),所述丝杆二(4)的另一端配合穿过另一个移动块(13)并配合设有丝杆座(1),所述丝杆座(1)与连接板一(2)远离连接板二(9)的侧壁焊接固定,所述丝杆一(6)与丝杆二(4)的螺纹方向相反。3.根据权利要求1所述的一种视觉抓取机器人用夹具,其特征在于:所述夹板一(3)为弧形夹板,两个所述夹板一(3)的圆心均位于两个夹板一(3)之间。4.根据权利要求3所述的一种视觉抓取机器人用夹具,其特征在于:两个所述夹板一(3)的相对内侧侧壁上分别设有橡胶垫片一。5.根据权利要求1所述的一种视觉抓取机器人用夹具,其特征在于:两个所述夹板二(12)的相对内侧侧壁上分别设有橡胶垫片二。
技术总结
本实用新型涉及一种视觉抓取机器人用夹具,包括相对设置的连接板一和连接板二,所述连接板一和连接板二之间连接设有液压缸,所述液压缸的活塞杆端穿过连接板二,所述连接板一远离连接板二的侧壁上下两侧分别通过滑槽滑动设有移动块,所述移动块远离连接板一的侧壁上设有夹板一,所述连接板一上设有用于驱动移动块上下移动的驱动机构,所述连接板二的上下两侧侧壁分别铰接设有曲形杆,所述曲形杆的另一端连接设有夹板二,所述液压缸的活塞杆端上下侧壁分别铰接设有连接杆,两个所述连接杆的另一端分别与两个曲形杆铰接。本实用新型与现有技术相比优点在于:安装拆卸方便,使用操作简单。简单。简单。
技术研发人员:杨仕伟
受保护的技术使用者:青岛海德自动化科技有限公司
技术研发日:2021.04.26
技术公布日:2022/1/4
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1