一种远程可控的消毒机器人的制作方法
1.本实用新型涉及一种公共服务机器人,具体是一种远程可控的消毒机器人。
背景技术:
2.由新型冠状病毒引起的疫情令大众对室内环境的清洁消毒更为关注,特别是养老院、医院等需要经常保持环境卫生的公众场所;日常清洁消毒工作中,更换床单被褥,对床、椅子、桌面等公共设施进行清洁消毒处理等工作需要大量工人完成,而工人长时间进行清洁消毒等工作会大大增加接触清洁剂、消毒剂的机率,导致皮肤容易出现过敏现象、且吸入太多清洁剂、消毒剂挥发的气体也会对身体造成不适、影响。针对上述问题,消毒机器人应运而生,然而市面上的消毒机器人,用户只能方面操控,与消毒机器人过多的直接接触同样会存在感染病毒的危险,因此有必要做进一步改进。
技术实现要素:
3.本实用新型的目的在于克服上述现有技术存在的不足,而提供一种远程可控的消毒机器人,本消毒机器人可进行全程控制,有效降低感染病毒的风险,保证用户的使用安全。
4.本实用新型的目的是这样实现的:
5.一种远程可控的消毒机器人,包括,
6.摄像模块,用于对周围环境进行监控,确保清洁消毒工作在无人环境下进行;
7.消毒模块,用于对周围环境实施消毒杀菌;
8.触屏模块,用于播报电子信息和输入控制指令;
9.agv小车,用于实现移动监控消毒机器人的行走移动;
10.树莓派微型电脑,连接各功能模块并将各功能模块接入至应用软件上,以统一控制;
11.所述摄像模块、消毒模块、agv小车和触屏模块分别连接树莓派微型电脑;所述树莓派微型电脑通讯连接服务器;所述摄像模块、消毒模块、agv小车、触屏模块和树莓派微型电脑分别设置于机身骨架上。
12.所述机身骨架上设置有升降机构,摄像模块360
°
横向转动的设置于升降机构上,升降机构驱动摄像模块相对机身骨架上下升降活动。
13.所述升降机构包括伸缩滑动在机身骨架上的顶升支架、以及用于驱动顶升支架上下升降的升降气缸;所述摄像模块设置于顶升支架顶部,并随顶升支架上下升降。
14.所述机身骨架上设置有翻转机构,一个以上消毒模块设置于翻转机构上,翻转机构驱动所述消毒模块相对机身骨架翻转活动。
15.所述机身骨架与agv小车之间设置有发光模块,发光模块连接树莓派微型电脑。
16.所述机身骨架或agv小车上设置有用于检测路障的超声波发生器,超声波发生器连接树莓派微型电脑。
17.所述机身骨架或agv小车上设置有用于紧急关停agv小车的急停开关;所述树莓派微型电脑连接急停开关。
18.本实用新型的有益效果如下:
19.树莓派微型电脑是基于arm的微型电脑,可运行linux系统和windows系统,具备所有pc的基本功能,而且体积小巧,功能强大,成本低;本消毒机器人通过设置树莓派微型电脑连接各功能模块并将各功能模块接入相应的软件中,方便整合各项功能实行统一控制,所以用户可通过软件远程控制消毒机器人,减少与消毒机器人的直接接触,进一步降低感染病毒的风险。
附图说明
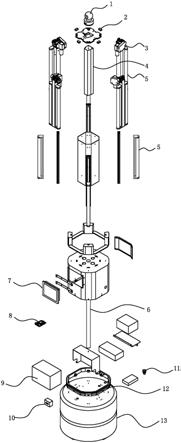
20.图1为本实用新型一实施例中消毒机器人的爆炸图。
21.图2为本实用新型一实施例中消毒机器人的架构图。
具体实施方式
22.下面结合附图及实施例对本实用新型作进一步描述。
23.参见图1和图2,本远程可控的消毒机器人,包括,
24.摄像模块1,用于对周围环境进行监控,确保清洁消毒工作在无人环境下进行;
25.消毒模块5,用于对周围环境实施消毒杀菌;
26.触屏模块7,用于播报电子信息和输入控制指令;
27.agv小车13,用于实现移动监控消毒机器人的行走移动;
28.树莓派微型电脑8,连接各功能模块并将各功能模块接入用软件上,以统一控制;
29.供电模块9,为各用电器件提供所需的电能;
30.摄像模块1、消毒模块5、agv小车13和触屏模块7分别连接树莓派微型电脑8;树莓派微型电脑8通讯连接服务器;摄像模块1、消毒模块5、agv小车13、触屏模块7和树莓派微型电脑8分别设置于机身骨架上。
31.本消毒机器人通过设置树莓派微型电脑连接各功能模块并将各功能模块接入相应的软件中,方便整合各项功能实行统一控制,所以用户可通过软件远程控制消毒机器人,减少与消毒机器人的直接接触,进一步降低感染病毒的风险。
32.进一步地,机身骨架上设置有升降机构,摄像模块1可360
°
横向转动的设置于升降机构上,升降机构驱动摄像模块1相对机身骨架上下升降活动。摄像模块1的升降活动和360
°
转动使摄像模块1更加全面的监控周围环境。
33.进一步地,升降机构包括伸缩滑动在机身骨架上的顶升支架4、以及用于驱动顶升支架4上下升降的升降气缸6;摄像模块1设置于顶升支架4顶部,并随顶升支架4上下升降。
34.进一步地,机身骨架上设置有翻转机构3,一个以上消毒模块5设置于翻转机构3上,翻转机构3驱动消毒模块5相对机身骨架翻转活动,通过翻转调节可扩大消毒模块5的有效消毒范围。此外,机身骨架上还设置有微动开关2,当消毒模块5翻转至极限位置时,微动开关2会被触碰导致控制电路断开,进而可有效避免消毒模块5过度翻转。
35.进一步地,机身骨架与agv小车13之间设置有发光模块12,发光模块12连接树莓派微型电脑8;发光模块12为优选rgb灯,可展示不同颜色的氛围灯效,使消毒机器人更加时尚
美观,同时可以不同的灯光颜色展示相应的工作状态,以便用户更加直观的知道消毒机器人的工装状态。
36.进一步地,agv小车13前侧设置有用于检测路障的超声波发生器10,超声波发生器10连接树莓派微型电脑8,超声波发生器10的设置可有效探测障碍物,进而加强消毒机器人回避路障功能。
37.进一步地,机身骨架或agv小车13上设置有用于紧急关停agv小车13的急停开关11,在发生紧急情况下用户可通过急停开关11紧急关停消毒机器人;树莓派微型电脑8连接急停开关11。
38.上述为本实用新型的优选方案,显示和描述了本实用新型的基本原理、主要特征和本实用新型的优点。本领域的技术人员应该了解本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等同物界定。
技术特征:
1.一种远程可控的消毒机器人,其特征在于:包括,摄像模块(1),用于对周围环境进行监控,确保清洁消毒工作在无人环境下进行;消毒模块(5),用于对周围环境实施消毒杀菌;触屏模块(7),用于播报电子信息和输入控制指令;agv小车(13),用于实现移动监控消毒机器人的行走移动;树莓派微型电脑(8),连接各功能模块以统一控制;所述摄像模块(1)、消毒模块(5)、agv小车(13)和触屏模块(7)分别连接树莓派微型电脑(8);所述树莓派微型电脑(8)通讯连接服务器;所述摄像模块(1)、消毒模块(5)、agv小车(13)、触屏模块(7)和树莓派微型电脑(8)分别设置于机身骨架上。2.根据权利要求1所述远程可控的消毒机器人,其特征在于:所述机身骨架上设置有升降机构,摄像模块(1)360
°
横向转动的设置于升降机构上,升降机构驱动摄像模块(1)相对机身骨架上下升降活动。3.根据权利要求2所述远程可控的消毒机器人,其特征在于:所述升降机构包括伸缩滑动在机身骨架上的顶升支架(4)、以及用于驱动顶升支架(4)上下升降的升降气缸(6);所述摄像模块(1)设置于顶升支架(4)顶部,并随顶升支架(4)上下升降。4.根据权利要求1所述远程可控的消毒机器人,其特征在于:所述机身骨架上设置有翻转机构(3),一个以上消毒模块(5)设置于翻转机构(3)上,翻转机构(3)驱动所述消毒模块(5)相对机身骨架翻转活动。5.根据权利要求1所述远程可控的消毒机器人,其特征在于:所述机身骨架与agv小车(13)之间设置有发光模块(12),发光模块(12)连接树莓派微型电脑(8)。6.根据权利要求1所述远程可控的消毒机器人,其特征在于:所述机身骨架或agv小车(13)上设置有用于检测路障的超声波发生器(10),超声波发生器(10)连接树莓派微型电脑(8)。7.根据权利要求1所述远程可控的消毒机器人,其特征在于:所述机身骨架或agv小车(13)上设置有用于紧急关停agv小车(13)的急停开关(11);所述树莓派微型电脑(8)连接急停开关(11)。
技术总结
本实用新型涉及一种远程可控的消毒机器人,包括,摄像模块,用于对周围环境进行监控,确保清洁消毒工作在无人环境下进行;消毒模块,用于对周围环境实施消毒杀菌;触屏模块,用于播报电子信息和输入控制指令;AGV小车,用于实现移动监控消毒机器人的行走移动;树莓派微型电脑,连接各功能模块并将各功能模块接入至应用软件上,以统一控制;所述摄像模块、消毒模块、AGV小车和触屏模块分别连接树莓派微型电脑;所述树莓派微型电脑通讯连接服务器;所述摄像模块、消毒模块、AGV小车、触屏模块和树莓派微型电脑分别设置于机身骨架上。本消毒机器人可进行全程控制,有效降低感染病毒的风险,保证用户的使用安全。保证用户的使用安全。保证用户的使用安全。
技术研发人员:麦骞誉
受保护的技术使用者:路邦康建有限公司
技术研发日:2021.04.27
技术公布日:2022/1/11
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1