一种工件全自动抓取装置的制作方法
1.本实用新型涉及自动化设备的技术领域,尤其是涉及一种工件全自动抓取装置。
背景技术:
2.在工业产品生产线上,通常需要先对目标工件进行抓取定位,然后再对该工件进传统抓取结构采用机械抓取,采用此结构的抓取需要多个部件相互配合,制造成本高,动作缓慢,效率低下;此外,市场上的夹具均无感应模块,在漏件时不会提示人员,影响后续的加工。
技术实现要素:
3.根据现有技术存在的不足,本实用新型的目的是提供一种工件全自动抓取装置,具有降低制造成本、提高效率、警示人员的效果。
4.本实用新型的上述技术目的是通过以下技术方案得以实现的:
5.一种工件全自动抓取装置,包括基座和工作台,所述基座的顶部转动安装有支架,所述支架的两侧均通过螺钉连接有安装板,且支架上滑动安装有升降座,所述升降座上滑动安装有对称布置的滑动座,所述滑动座上通过沉头螺钉固定有夹头;
6.所述安装板为l形的板状结构,安装板的端部焊接有导板,所述导板上滑动设置有滑块,滑块的一侧通过螺丝固定有连接杆,所述连接杆的另一端与对应的所述滑动座固定连接。
7.通过采用上述技术方案,实现了对工件的自动抓取,降低制造成本,加快抓取效率。
8.本实用新型在一较佳示例中可以进一步配置为:所述夹头的一侧固定安装有压力感应器,所述升降座上分别固定安装有控制模块和警示灯,所述压力感应器和警示灯均与所述控制模块电性连接。
9.通过采用上述技术方案,在未夹取到工件时会警示人员,避免误加工。
10.本实用新型在一较佳示例中可以进一步配置为:所述基座的内部固定安装有伺服电机,所述伺服电机的输出端通过联轴器连接有主轴,所述主轴与所述支架固定连接。
11.通过采用上述技术方案,使得基座能够自动转动,快速运料。
12.本实用新型在一较佳示例中可以进一步配置为:所述导板的一侧呈倾斜状,导板上开设有呈倾斜状的导槽,所述滑块与导槽滑动连接。
13.通过采用上述技术方案,提高了滑块的移动稳定性。
14.本实用新型在一较佳示例中可以进一步配置为:所述支架的一侧通过沉头螺钉固定有对称布置的导轨,所述升降座与导轨滑动连接。
15.通过采用上述技术方案,提高了升降座的移动稳定性。
16.本实用新型在一较佳示例中可以进一步配置为:所述升降座的一侧通过铆钉固定有滑轨,两个所述滑动座与所述滑轨滑动连接。
17.通过采用上述技术方案,提高了滑动座的移动稳定性。
18.综上所述,本实用新型包括以下至少一种有益技术效果:
19.1.通过安装板、导板、连接杆、滑块以及滑动座等结构的设置,当用于夹取的夹头向下移动后,在两侧导板的作用下会使得两个夹头自动地相向滑移将工件夹紧,仅采用一个驱动源,制造成本低,动作迅速,提高了抓取效率;
20.2.通过控制模块、压力感应器以及警示灯等结构的设置,夹头动作一次夹取工件后,若无夹取到工件,则压力感应器将信号输出至控制模块,控制模块信号点灯警示灯,提示人员,确保了加工的稳定进行。
附图说明
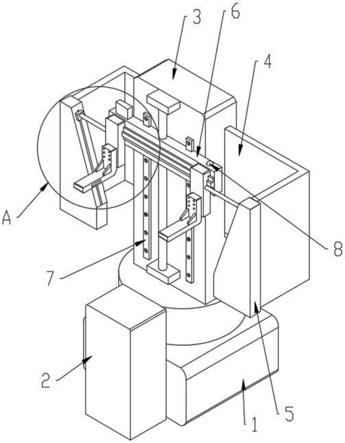
21.图1是本实施例的整体结构示意图;
22.图2是图1中的标号a处放大。
23.图中,1基座、2工作台、3支架、4安装板、5导板、6升降座、7导轨、8警示灯、9控制模块、10导槽、11滑动座、12夹头、13压力感应器、14滑块、15连接杆。
具体实施方式
24.以下结合附图对本实用新型作进一步详细说明。
25.实施例:
26.参照图1,本实用新型公开的一种工件全自动抓取装置,包括基座1和工作台2,基座1的顶部转动安装有支架3,支架3的两侧均通过螺钉连接有安装板4,且支架3上滑动安装有升降座6,升降座6上滑动安装有对称布置的滑动座11,滑动座11上通过沉头螺钉固定有夹头12;安装板4为l形的板状结构,安装板4的端部焊接有导板5,导板5上滑动设置有滑块14,滑块14的一侧通过螺丝固定有连接杆15,连接杆15的另一端与对应的滑动座11固定连接,通过安装板4、导板5、连接杆15、滑块14以及滑动座11等结构的设置,当用于夹取的夹头12向下移动后,在两侧导板5的作用下会使得两个夹头12自动地相向滑移将工件夹紧,仅采用一个驱动源,制造成本低,动作迅速,提高了抓取效率。
27.参照图1及图2,夹头12的一侧固定安装有压力感应器13,升降座6上分别固定安装有控制模块9和警示灯8,压力感应器13和警示灯8均与控制模块9电性连接,通过控制模块9、压力感应器13以及警示灯8等结构的设置,夹头12动作一次夹取工件后,若无夹取到工件,则压力感应器13将信号输出至控制模块9,控制模块9信号点灯警示灯8,提示人员,确保了加工的稳定进行。
28.参照图1,基座1的内部固定安装有伺服电机,伺服电机的输出端通过联轴器连接有主轴,主轴与支架3固定连接。
29.参照图2,另外,导板5的一侧呈倾斜状,导板5上开设有呈倾斜状的导槽10,滑块14与导槽10滑动连接。
30.参照图2,支架3的一侧通过沉头螺钉固定有对称布置的导轨7,升降座6与导轨7滑动连接。
31.参照图1,升降座6的一侧通过铆钉固定有滑轨,两个滑动座11与滑轨滑动连接。
32.上述实施例的实施原理为:加工时,工件由上道工序流入至工作台2顶部,升降座6
在伺服装置驱动下向下移动,两个夹头12向下移动靠近工件,移动过程中,滑块14沿着倾斜状的导槽10滑移,在导槽10的引导下使得两个连接杆15还向中心靠近,当夹头12移至工件位置时,两个夹头12自动地将工件夹紧固定,随后内部的伺服电机动作,使得支架3转动,转动至下料工位后,伺服装置再驱动升降座6向上移动复位,夹头12向上移动时在导槽10的导向下自动分开,产品则落下,随后伺服电机再次使得支架3复位,夹头12朝向工作台2方向夹取下一个工件,需要说明的是,在升降座6上还装有位移传感器,用于监测夹头12的移动行程,当夹头12不是处于最下方的抓取工位时,警示灯8不点亮。
33.本具体实施方式的实施例均为本实用新型的较佳实施例,并非依此限制本实用新型的保护范围,故:凡依本实用新型的结构、形状、原理所做的等效变化,均应涵盖于本实用新型的保护范围之内。
技术特征:
1.一种工件全自动抓取装置,包括基座(1)和工作台(2),其特征在于:所述基座(1)的顶部转动安装有支架(3),所述支架(3)的两侧均通过螺钉连接有安装板(4),且支架(3)上滑动安装有升降座(6),所述升降座(6)上滑动安装有对称布置的滑动座(11),所述滑动座(11)上通过沉头螺钉固定有夹头(12);所述安装板(4)为l形的板状结构,安装板(4)的端部焊接有导板(5),所述导板(5)上滑动设置有滑块(14),滑块(14)的一侧通过螺丝固定有连接杆(15),所述连接杆(15)的另一端与对应的所述滑动座(11)固定连接。2.根据权利要求1所述的一种工件全自动抓取装置,其特征在于:所述夹头(12)的一侧固定安装有压力感应器(13),所述升降座(6)上分别固定安装有控制模块(9)和警示灯(8),所述压力感应器(13)和警示灯(8)均与所述控制模块(9)电性连接。3.根据权利要求1所述的一种工件全自动抓取装置,其特征在于:所述基座(1)的内部固定安装有伺服电机,所述伺服电机的输出端通过联轴器连接有主轴,所述主轴与所述支架(3)固定连接。4.根据权利要求1所述的一种工件全自动抓取装置,其特征在于:所述导板(5)的一侧呈倾斜状,导板(5)上开设有呈倾斜状的导槽(10),所述滑块(14)与导槽(10)滑动连接。5.根据权利要求1所述的一种工件全自动抓取装置,其特征在于:所述支架(3)的一侧通过沉头螺钉固定有对称布置的导轨(7),所述升降座(6)与导轨(7)滑动连接。6.根据权利要求1所述的一种工件全自动抓取装置,其特征在于:所述升降座(6)的一侧通过铆钉固定有滑轨,两个所述滑动座(11)与所述滑轨滑动连接。
技术总结
本实用新型涉及一种工件全自动抓取装置,包括基座和工作台,所述基座的顶部转动安装有支架,所述支架的两侧均通过螺钉连接有安装板,且支架上滑动安装有升降座,所述升降座上滑动安装有对称布置的滑动座,所述滑动座上通过沉头螺钉固定有夹头;所述安装板为L形的板状结构,安装板的端部焊接有导板,所述导板上滑动设置有滑块,滑块的一侧通过螺丝固定有连接杆,所述连接杆的另一端与对应的所述滑动座固定连接。通过安装板、导板、连接杆、滑块以及滑动座等结构的设置,当用于夹取的夹头向下移动后,在两侧导板的作用下会使得两个夹头自动地相向滑移将工件夹紧,仅采用一个驱动源,制造成本低,动作迅速,提高了抓取效率。提高了抓取效率。提高了抓取效率。
技术研发人员:张治远 薛轶馨 王晓磊 邵亚云 黄鹏
受保护的技术使用者:江苏昆展名智能科技有限公司
技术研发日:2021.06.09
技术公布日:2022/2/8
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1