一种自动贴合设备四轴机械臂机构的制作方法
1.本实用新型属于机械技术领域,具体涉及一种自动贴合设备四轴机械臂机构。
背景技术:
2.传统的吸盘取料装置都是通过三轴驱动机构带动吸盘分别在xyz三轴方向上移动,灵活性很低,工作效率很低;同时,吸盘在吸料的过程中经常会出现因位置不准确或者吸盘距离产品位置太远而导致吸盘无法吸取物料的情况。
3.因此,有必要设计一种自动贴合设备四轴机械臂机构来解决上述技术问题。
技术实现要素:
4.为克服上述现有技术中的不足,本实用新型目的在于提供一种自动贴合设备四轴机械臂机构。
5.为实现上述目的及其他相关目的,本实用新型提供的技术方案是:一种自动贴合设备四轴机械臂机构,包括机械臂底座、中间旋转臂、前旋转臂、升降臂以及吸料头;所述中间旋转臂设置在所述机械臂底座上,所述前旋转臂连接所述中间旋转臂,所述升降臂设置在所述前旋转臂上,所述吸料头设置在所述升降臂的底端,所述吸料头包括吸料板,所述吸料板的底端面开设有若干个真空吸盘,同时所述吸料板的底端面设置有光纤传感器。
6.优选的,所述吸料头还包括前固定板和后固定板,所述前固定板和所述后固定板通过螺钉夹紧在所述升降臂的轴端上,所述前固定板通过螺钉与所述吸料板固定连接。
7.优选的,所述前固定板与吸料板之间还设置有缓冲压簧。
8.优选的,所述光纤传感器内嵌在所述吸料板底端面。
9.优选的,所述吸料板的一侧设置有气管接头,所述气管接头连通所述真空吸盘。
10.由于上述技术方案运用,本实用新型与现有技术相比具有的优点如下:
11.本方案设计的一种自动贴合设备四轴机械臂机构,四周机械臂带动吸料头移动,用于吸取psa胶片,精准快速,同时独特的psa吸料板设计,嵌入式光纤传感器既可以检测psa料堆高度,也可以检测psa产品的有无,保证吸料稳定。
附图说明
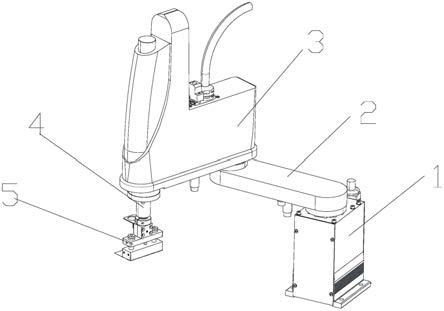
12.图1为设备整体结构示意图。
13.图2为吸料头结构示意图。
14.图3为吸料板底端面示意图。
15.以上附图中,机械臂底座1、中间旋转臂2、前旋转臂3、升降臂4、吸料头5、吸料板6、真空吸盘7、光纤传感器8、前固定板9、后固定板10、缓冲压簧11、气管接头12。
具体实施方式
16.以下由特定的具体实施例说明本实用新型的实施方式,熟悉此技术的人士可由本
说明书所揭露的内容轻易地了解本实用新型的其他优点及功效。
17.请参阅图1~图3。须知,在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该实用新型产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”等仅用于区分描述,而不能理解为指示或暗示相对重要性。术语“水平”、“竖直”、“悬垂”等术语并不表示要求部件绝对水平或悬垂,而是可以稍微倾斜。如“水平”仅仅是指其方向相对“竖直”而言更加水平,并不是表示该结构一定要完全水平,而是可以稍微倾斜。
18.在本实用新型的描述中,还需要说明的是,除非另有明确的规定和限定,术语“设置”、“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接,可以是机械连接,也可以是电连接,可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
19.如图1 所示,一种自动贴合设备四轴机械臂机构,包括机械臂底座1、中间旋转臂2、前旋转臂3、升降臂4以及吸料头5;所述中间旋转臂2设置在所述机械臂底座1上,所述前旋转臂3连接所述中间旋转臂2,所述升降臂4设置在所述前旋转臂3上,所述吸料头5设置在所述升降臂4的底端,所述吸料头5包括吸料板6;如图3所示,所述吸料板6的底端面开设有若干个真空吸盘7,同时所述吸料板6的底端面设置有光纤传感器8,本方案设计的一种自动贴合设备四轴机械臂机构,四周机械臂带动吸料头5移动,用于吸取psa胶片,精准快速,同时独特的psa吸料板6设计,嵌入式光纤传感器8既可以检测psa料堆高度,也可以检测psa产品的有无,保证吸料稳定。
20.优选的实施方式如下:
21.如图2所示,所述吸料头5还包括前固定板9和后固定板10,所述前固定板9和所述后固定板10通过螺钉夹紧在所述升降臂4的轴端上,所述前固定板9通过螺钉与所述吸料板6固定连接。
22.如图2所示,所述前固定板9与吸料板6之间还设置有缓冲压簧11,因为取料高度会有一定误差,psa堆叠也有高度误差,这两部分误差通过压簧来吸收,并在取料时有一个弹性保护,防止压伤产品。
23.如图3所示,所述光纤传感器8内嵌在所述吸料板6底端面,反射式光纤传感器8埋入吸料板6,其感应头正对产品上表面,当机械臂下降,光纤感应到产品上表面时,即为预取料高度,然后机械臂下降一个固定高度,真空开启吸料板6提取psa产品薄膜。
24.如图2所示,所述吸料板6的一侧设置有气管接头12,所述气管接头12连通所述真空吸盘7,气管接头12连接外部气源,用于真空吸盘7吸取物料。
25.上述实施例仅例示性说明本实用新型的原理及其功效,而非用于限制本实用新型。任何熟悉此技术的人士皆可在不违背本实用新型的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本实用新型所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本实用新型的权利要求所涵盖。
技术特征:
1.一种自动贴合设备四轴机械臂机构,其特征在于:包括机械臂底座、中间旋转臂、前旋转臂、升降臂以及吸料头;所述中间旋转臂设置在所述机械臂底座上,所述前旋转臂连接所述中间旋转臂,所述升降臂设置在所述前旋转臂上,所述吸料头设置在所述升降臂的底端,所述吸料头包括吸料板,所述吸料板的底端面开设有若干个真空吸盘,同时所述吸料板的底端面设置有光纤传感器。2.根据权利要求1所述的一种自动贴合设备四轴机械臂机构,其特征在于:所述吸料头还包括前固定板和后固定板,所述前固定板和所述后固定板通过螺钉夹紧在所述升降臂的轴端上,所述前固定板通过螺钉与所述吸料板固定连接。3.根据权利要求2所述的一种自动贴合设备四轴机械臂机构,其特征在于:所述前固定板与吸料板之间还设置有缓冲压簧。4.根据权利要求1所述的一种自动贴合设备四轴机械臂机构,其特征在于:所述光纤传感器内嵌在所述吸料板底端面。5.根据权利要求1所述的一种自动贴合设备四轴机械臂机构,其特征在于:所述吸料板的一侧设置有气管接头,所述气管接头连通所述真空吸盘。
技术总结
一种自动贴合设备四轴机械臂机构,包括机械臂底座、中间旋转臂、前旋转臂、升降臂以及吸料头;所述中间旋转臂设置在所述机械臂底座上,所述前旋转臂连接所述中间旋转臂,所述升降臂设置在所述前旋转臂上,所述吸料头设置在所述升降臂的底端,所述吸料头包括吸料板,所述吸料板的底端面开设有若干个真空吸盘,同时所述吸料板的底端面设置有光纤传感器;本方案设计的一种自动贴合设备四轴机械臂机构,四周机械臂带动吸料头移动,用于吸取PSA胶片,精准快速,同时独特的PSA吸料板设计,嵌入式光纤传感器既可以检测PSA料堆高度,也可以检测PSA产品的有无,保证吸料稳定。保证吸料稳定。保证吸料稳定。
技术研发人员:张赞立
受保护的技术使用者:精元电脑(江苏)有限公司
技术研发日:2021.08.10
技术公布日:2022/2/6
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1