仿人机器人一体化关节三维可调安装机构的制作方法
1.本实用新型涉及仿人机器人测试技术领域,更具体的是涉及仿人机器人一体化关节三维可调安装机构。
背景技术:
2.仿人机器人是一种模仿人的形态和行为而设计制造的机器人,一般情况下分别或同时有仿人的四肢和头部,能够有效模仿人体的某些物理功能、感知功能和社交行为。
3.现有的仿人机器人包括一体化关节、电机和减速机,其中,一体化关节的定位精度、效率和对抗冲击的能力需要满足特殊要求,现有技术中,一般采用三维可调安装机构安装一体化关节,之后对一体化关节进行测试。
4.现有的三维可调安装机构在进行z轴方向即竖直上下的方向进行调节时,难以在调节时保证安装机构的水平度,需要在z轴调节完成后重新调整水平度,而调整水平度又会导致z轴的调节精度发生变化,使得z轴的调节变得非常麻烦,并且难以保证精度。
技术实现要素:
5.本实用新型的目的在于:为了解决现有的一体化关节的三维可调安装机构存在的z轴方向调节存在的非常麻烦并且难以保证精度的问题,本实用新型提供仿人机器人一体化关节三维可调安装机构。
6.本实用新型为了实现上述目的具体采用以下技术方案:
7.仿人机器人一体化关节三维可调安装机构,包括底座,所述底座上设有底层安装板和带动底层安装板沿y轴方向运动的y轴移动机构,所述底层安装板上设有顶层安装板和带动顶层安装板沿x轴方向运动的x轴移动机构,所述顶层安装板上设有安装一体化关节的安装支架和位于安装支架两端的用于安装支架导向的竖直导向机构,所述顶层安装板上设有下斜面,所述下斜面沿y轴方向倾斜向上设置,所述顶层安装板上设有带动下斜面沿y轴方向运动的驱动机构,所述安装支架下端设有上斜面,所述上斜面和下斜面相配合。
8.进一步地,所述y轴移动机构包括设在底座上的y轴导轨和y轴丝杆,所述底层安装板下端设有和y轴导轨相配合的y轴滑块,所述底层安装板上设有和y轴丝杆相配合的丝杆螺母。
9.进一步地,所述x轴移动机构包括设在底层安装板上的x轴导轨和x轴丝杆,所述顶层安装板下端设有和x轴导轨相配合的x轴滑块,所述顶层安装板上设有和x轴丝杆相配合的丝杆螺母。
10.进一步地,所述竖直导向机构包括设在安装支架两端的竖直立柱,所述竖直立柱上设有z轴导轨,所述安装支架上设有和z轴导轨相配合的z轴导向块。
11.进一步地,所述底座上设有x轴移动检测机构、y轴移动检测机构和z轴移动检测机构。
12.进一步地,x轴移动检测机构、y轴移动检测机构和z轴移动检测机构均为直线光栅
尺。
13.进一步地,所述驱动机构包括y向丝杆,所述下斜面上设有和y向丝杆相配合的丝杆螺母。
14.本实用新型的有益效果如下:
15.(1)驱动机构带动下斜面沿y轴方向运动,下斜面通过上斜面带动安装支架沿z轴上下运动,在运动过程中,下斜面和上斜面始终贴合在一起,使得安装支架保持水平,当z轴调整到位后,不需要重新调整水平度,调整方便快捷;
16.(2)x轴移动检测机构、y轴移动检测机构和z轴移动检测机构能够检测x轴、y轴和z轴的位移,实现高精度调节。
附图说明
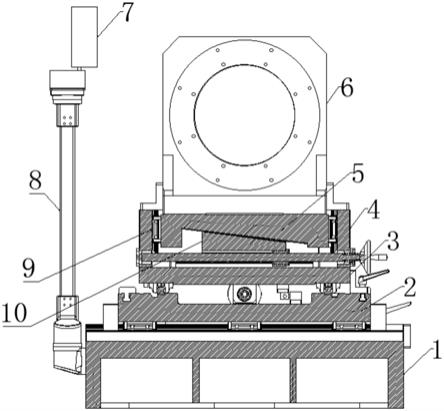
17.图1是本实用新型的结构示意图;
18.图2是本实用新型的正视结构示意图;
19.图3是本实用新型的俯视结构示意图;
20.附图标记:1-底座、2-底层安装板、3-顶层安装板、4-竖直立柱、5-上斜面、6-安装支架、7-位移显示器、8-臂杆、9-z轴导轨、10-下斜面、11-轴承座、12-扭矩传感器、13-负载电机。
具体实施方式
21.实施例1
22.参见图1到3,本实施例提供仿人机器人一体化关节三维可调安装机构,包括底座1,所述底座1上设有底层安装板2和带动底层安装板2沿y轴方向运动的y轴移动机构,所述底层安装板2上设有顶层安装板3和带动顶层安装板3沿x轴方向运动的x轴移动机构,所述顶层安装板3上设有安装一体化关节的安装支架6和位于安装支架6两端的用于安装支架6导向的竖直导向机构,所述顶层安装板3上设有下斜面10,所述下斜面10沿y轴方向倾斜向上设置,所述顶层安装板3上设有带动下斜面10沿y轴方向运动的驱动机构,所述安装支架6下端设有上斜面5,所述上斜面5和下斜面10相配合,具体的,底座1上设有测试机构,测试机构包括从左到右依次设置的负载电机13、扭矩传感器12和轴承座11并且相邻部件之间通过联轴器相连接。
23.工作原理:把一体化关节安装在安装支架6上,y轴移动机构带动安装支架6实现y轴方向的移动,x轴移动机构带动安装支架6实现x轴方向的移动,驱动机构带动下斜面10沿y轴方向运动,下斜面10通过上斜面5带动安装支架6沿z轴上下运动,在运动过程中,下斜面10和上斜面5始终贴合在一起,使得安装支架6保持水平,当安装支架6调整到位后,通过联轴器把轴承座11和一体化关节相连接,进行一体化关节的测试工作。
24.实施例2
25.参见图1到3,本实施例在实施例1的基础上做了进一步改进,具体为所述y轴移动机构包括设在底座1上的y轴导轨和y轴丝杆,所述底层安装板2下端设有和y轴导轨相配合的y轴滑块,所述底层安装板2上设有和y轴丝杆相配合的丝杆螺母。
26.实施例3
27.参见图1到3,本实施例在实施例1的基础上做了进一步改进,具体为所述x轴移动机构包括设在底层安装板2上的x轴导轨和x轴丝杆,所述顶层安装板3下端设有和x轴导轨相配合的x轴滑块,所述顶层安装板3上设有和x轴丝杆相配合的丝杆螺母。
28.实施例4
29.参见图1到3,本实施例在实施例1的基础上做了进一步改进,具体为所述竖直导向机构包括设在安装支架6两端的竖直立柱4,所述竖直立柱4上设有z轴导轨9,所述安装支架6上设有和z轴导轨9相配合的z轴导向块。
30.实施例5
31.参见图1到3,本实施例在实施例1的基础上做了进一步改进,具体为所述底座1上设有x轴移动检测机构、y轴移动检测机构和z轴移动检测机构。
32.实施例6
33.参见图1到3,本实施例在实施例5的基础上做了进一步改进,具体为x轴移动检测机构、y轴移动检测机构和z轴移动检测机构均为直线光栅尺,所述底座1上设有臂杆8,所述臂杆8上设有显示直线光栅尺的检测数据的位移显示器7。
34.实施例7
35.参见图1到3,本实施例在实施例1的基础上做了进一步改进,具体为所述驱动机构包括y向丝杆,所述下斜面10上设有和y向丝杆相配合的丝杆螺母。
技术特征:
1.仿人机器人一体化关节三维可调安装机构,其特征在于,包括底座(1),所述底座(1)上设有底层安装板(2)和带动底层安装板(2)沿y轴方向运动的y轴移动机构,所述底层安装板(2)上设有顶层安装板(3)和带动顶层安装板(3)沿x轴方向运动的x轴移动机构,所述顶层安装板(3)上设有安装一体化关节的安装支架(6)和位于安装支架(6)两端的用于安装支架(6)导向的竖直导向机构,所述顶层安装板(3)上设有下斜面(10),所述下斜面(10)沿y轴方向倾斜向上设置,所述顶层安装板(3)上设有带动下斜面(10)沿y轴方向运动的驱动机构,所述安装支架(6)下端设有上斜面(5),所述上斜面(5)和下斜面(10)相配合。2.根据权利要求1所述的仿人机器人一体化关节三维可调安装机构,其特征在于,所述y轴移动机构包括设在底座(1)上的y轴导轨和y轴丝杆,所述底层安装板(2)下端设有和y轴导轨相配合的y轴滑块,所述底层安装板(2)上设有和y轴丝杆相配合的丝杆螺母。3.根据权利要求1或2所述的仿人机器人一体化关节三维可调安装机构,其特征在于,所述x轴移动机构包括设在底层安装板(2)上的x轴导轨和x轴丝杆,所述顶层安装板(3)下端设有和x轴导轨相配合的x轴滑块,所述顶层安装板(3)上设有和x轴丝杆相配合的丝杆螺母。4.根据权利要求1或2所述的仿人机器人一体化关节三维可调安装机构,其特征在于,所述竖直导向机构包括设在安装支架(6)两端的竖直立柱(4),所述竖直立柱(4)上设有z轴导轨(9),所述安装支架(6)上设有和z轴导轨(9)相配合的z轴导向块。5.根据权利要求1或2所述的仿人机器人一体化关节三维可调安装机构,其特征在于,所述底座(1)上设有x轴移动检测机构、y轴移动检测机构和z轴移动检测机构。6.根据权利要求5所述的仿人机器人一体化关节三维可调安装机构,其特征在于,所述x轴移动检测机构、y轴移动检测机构和z轴移动检测机构均为直线光栅尺。7.根据权利要求1或2所述的仿人机器人一体化关节三维可调安装机构,其特征在于,所述驱动机构包括y向丝杆,所述下斜面(10)上设有和y向丝杆相配合的丝杆螺母。
技术总结
本实用新型公开了仿人机器人一体化关节三维可调安装机构,涉及仿人机器人测试技术领域,包括底座,所述底座上设有底层安装板和带动底层安装板沿Y轴方向运动的Y轴移动机构,所述底层安装板上设有顶层安装板和带动顶层安装板沿X轴方向运动的X轴移动机构,所述顶层安装板上设有安装一体化关节的安装支架和位于安装支架两端的用于安装支架导向的竖直导向机构,所述顶层安装板上设有下斜面,所述下斜面沿Y轴方向倾斜向上设置,所述顶层安装板上设有带动下斜面沿Y轴方向运动的驱动机构,所述安装支架下端设有上斜面,所述上斜面和下斜面相配合,当Z轴调整到位后,不需要重新调整水平度,调整方便快捷。调整方便快捷。调整方便快捷。
技术研发人员:寇双勇 刘陈
受保护的技术使用者:四川志方科技有限公司
技术研发日:2021.08.25
技术公布日:2022/3/25
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1