一种锻压机器人取料抓手机构的制作方法
1.本实用新型涉及机械抓手领域,具体而言为一种锻压机器人取料抓手机构。
背景技术:
2.现在所用的锻压机器人取料抓手机构是采用的手指气缸,通过前面两个手指固定夹杆,通过气体控制手指左右开合从而带动前端夹杆夹取物料及放下物料。但由于锻压工件(轴承套圈)在不同工位形状大小尺变化很大,这种抓手对有些尺寸较大的工件夹持不住,因为受到气缸宽带的限制。
技术实现要素:
3.本实用新型的目的是提供新型锻压机器人取料抓手机构,可以抓取更大尺寸的物料。
4.本实用新型的具体技术方案如下:
5.一种锻压机器人取料抓手机构,包括气缸和夹杆,所述锻压机器人取料抓手机构整体左右对称;所述气缸的前端有伸缩杆,所述伸缩杆的前端与后连接块连接,所述后连接块的左右两端各自与一根推拉杆的后端活动连接,所述推拉杆的前端与连接杆的后端活动连接,所述连接杆的中部与前连接块活动连接,所述连接杆的前端与夹杆连接,将所述连接杆的前端、中部、后端依次连接后为一钝角,所述钝角朝外。
6.注:伸缩杆收缩,后连接块随之后移,带动推拉杆由向外倾斜变为竖直,进而带动连接杆由向外倾斜变为竖直,由于连接杆为弯曲的,连接杆的另一端此时会向外倾斜,两根连接杆都向外倾斜则夹杆打开,准备夹持物料。
7.进一步地,所述活动连接为绕着竖直轴在水平面上旋转。
8.进一步地,还包括滑轨和滑动块,所述滑动块在所述滑轨上滑动,所述滑轨沿着前后方向,所述滑动块与所述气缸的下表面固定。
9.注:滑动块滑动到一定位置后可以固定(如通过螺纹螺孔结构)在需要的地方,适应更多种工况。
10.进一步地,还包括机架,所述滑轨安装在所述机架上。
11.进一步地,所述机架上有连接部,所述连接部与机械臂连接。
12.进一步地,所述夹杆可与所述连接杆分离。
13.注:可以通过更换形状、尺寸不同的夹杆来适应不同形状、大小的物料,夹杆越长,能夹持的物料越大。
14.有益效果:能够适应更多种工况,能够夹持住不同形状、大小的物料,不受气缸宽度的限制,理论上夹杆越长,能夹持的物料越大。
附图说明
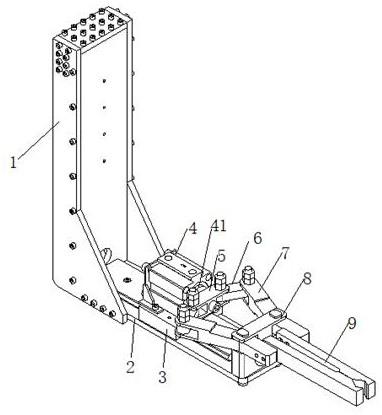
15.图1是一种锻压机器人取料抓手机构立体图。
16.图2是一种锻压机器人取料抓手机构左视图。
17.图3是一种锻压机器人取料抓手机构俯视图。
18.机架1、滑轨2、滑动块3、气缸4、伸缩杆41、后连接块5、推拉杆6、连接杆7、前连接块8、夹杆9。
具体实施方式
19.如图1-3,一种锻压机器人取料抓手机构,包括气缸4和夹杆9,还包括机架1,所述滑轨2安装在所述机架1上。所述机架1上有连接部,所述连接部与机械臂连接。所述锻压机器人取料抓手机构整体左右对称;所述气缸4的前端有伸缩杆41,所述伸缩杆41的前端与后连接块5连接,所述后连接块5的左右两端各自与一根推拉杆6的后端活动连接,所述推拉杆6的前端与连接杆7的后端活动连接,所述连接杆7的中部与前连接块8活动连接,所述连接杆7的前端与夹杆9连接,将所述连接杆7的前端、中部、后端依次连接后为一钝角,所述钝角朝外。所述活动连接为绕着竖直轴在水平面上旋转。还包括滑轨2和滑动块3,所述滑动块3在所述滑轨2上滑动,所述滑轨2沿着前后方向,所述滑动块3与所述气缸4的下表面固定。所述夹杆4可与所述连接杆7分离。伸缩杆41收缩,后连接块5随之后移,带动推拉杆6由向外倾斜变为竖直,进而带动连接杆7由向外倾斜变为竖直,由于连接杆7为弯曲的,连接杆7的另一端此时会向外倾斜,两根连接杆7都向外倾斜则夹杆9打开,准备夹持物料;伸缩杆41伸出,则反之。
20.以上公开的仅仅是本实用新型的较佳实施例,但并非用以限制其本身,任何本领域的技术人员在不违背本实用新型精神内涵的情况下,所作的变化和改动,均应落在本实用新型的保护范围内。
技术特征:
1.一种锻压机器人取料抓手机构,包括气缸和夹杆,其特征在于,所述锻压机器人取料抓手机构整体左右对称;所述气缸的前端有伸缩杆,所述伸缩杆的前端与后连接块连接,所述后连接块的左右两端各自与一根推拉杆的后端活动连接,所述推拉杆的前端与连接杆的后端活动连接,所述连接杆的中部与前连接块活动连接,所述连接杆的前端与夹杆连接,将所述连接杆的前端、中部、后端依次连接后为一钝角,所述钝角朝外。2.根据权利要求1所述的锻压机器人取料抓手机构,其特征在于,所述活动连接为绕着竖直轴在水平面上旋转。3.根据权利要求1所述的锻压机器人取料抓手机构,其特征在于,还包括滑轨和滑动块,所述滑动块在所述滑轨上滑动,所述滑轨沿着前后方向,所述滑动块与所述气缸的下表面固定。4.根据权利要求3所述的锻压机器人取料抓手机构,其特征在于,还包括机架,所述滑轨安装在所述机架上。5.根据权利要求4所述的锻压机器人取料抓手机构,其特征在于,所述机架上有连接部,所述连接部与机械臂连接。6.根据权利要求1所述的锻压机器人取料抓手机构,其特征在于,所述夹杆可与所述连接杆分离。
技术总结
本实用新型为一种锻压机器人取料抓手机构,适用于机械抓手领域。现有的取料抓手所夹持物料的尺寸受到气缸宽度限制。本实用新型包括气缸和夹杆,所述锻压机器人取料抓手机构整体左右对称;所述气缸的前端有伸缩杆,所述伸缩杆的前端与后连接块连接,所述后连接块的左右两端各自与一根推拉杆的后端活动连接,所述推拉杆的前端与连接杆的后端活动连接,所述连接杆的中部与前连接块活动连接,所述连接杆的前端与夹杆连接,将所述连接杆的前端、中部、后端依次连接后为一钝角,所述钝角朝外。可以通过更换形状、尺寸不同的夹杆来适应不同形状、大小的物料,夹杆越长,能夹持的物料越大。能夹持的物料越大。能夹持的物料越大。
技术研发人员:侯咸清
受保护的技术使用者:上海载科智能科技有限公司
技术研发日:2021.09.01
技术公布日:2022/2/22
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1