一种具有卸盘翻盘卸料上架功能的工业机器人的制作方法
1.本实用新型涉及机器人技术领域,尤其涉及一种具有卸盘翻盘卸料上架功能的工业机器人。
背景技术:
2.工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器,它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动,工业机器人在工业生产中能代替人做某些单调、频繁和重复的长时间作业,或是危险、恶劣环境下的作业;
3.目前,工业机器人在对料盘进行抓取上料过程中,需要对料盘进行卸盘翻盘卸料,而现有的工业机器人无法同时做到对料盘的进行反转和卸料,需要多个机器人同时配合才能完成,这就导致整体的生产成本提高,同时也影响生产效率。
技术实现要素:
4.本实用新型的目的是为了解决现有技术中存在无法同时做到翻盘卸料的缺点,而提出的一种具有卸盘翻盘卸料上架功能的工业机器人。
5.为了实现上述目的,本实用新型采用了如下技术方案:
6.设计一种具有卸盘翻盘卸料上架功能的工业机器人,包括底座,所述底座的底部转动安装有若干自锁万向轮,所述底座的底部固定安装有第一电机,所述底座的顶部转动安装有转盘,所述第一电机的输出轴与转盘固定连接,所述转盘的顶部铰接有第一连接臂,所述转盘的顶部还铰接有第一气缸,所述第一气缸的输出端与第一连接臂的侧壁铰接,所述第一连接臂的顶部铰接有第二连接臂,所述第二连接臂与第一连接臂之间安装有第二气缸,所述第二气缸铰接在第一连接臂上,所述第二气缸的输出端与第二连接臂的侧壁铰接。
7.优选的,所述第二连接臂的一端固定安装有第二电机,所述第二连接臂的内侧转动安装有贯穿的转轴,所述第二电机的输出端与转轴固定连接。
8.优选的,所述转轴的端部安装有夹持机构,所述夹持机构包括安装座,所述安装座的内侧转动安装有两个齿轮,两个所述齿轮相互啮合。
9.优选的,所述安装座的顶部固定安装有第三电机,所述第三电机的输出轴与相应的齿轮固定连接。
10.优选的,两个所述齿轮上均同轴固定安装有转动杆,两个所述转动杆远离相应的齿轮的一端均固定安装有夹持座,两个所述夹持座可相互配合。
11.本实用新型提出的一种具有卸盘翻盘卸料上架功能的工业机器人,有益效果在于:通过第一电机驱动转盘转动,从而调整体的水平角度;通过控制第一气缸使得第一连接臂转动,从而调整第二连接臂的高度;通过控制第二电机使得安装座转动,从而实现料盘的翻转;通过第三电机使得其中一个齿轮转动,进而使得两个转动杆相向转动,也就使得夹持
座对料盘进行夹持;通过控制第二气缸使得第二连接臂转动,从而控制料盘的纵向角度进行卸料,整个过程完全通过一个机器人实现,大大提高了生产效率。
附图说明
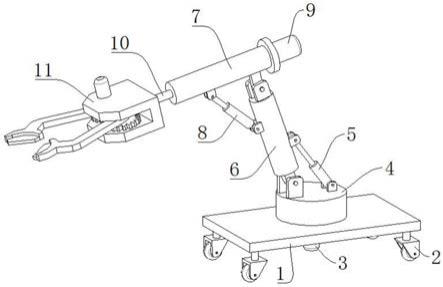
12.图1为本实用新型提出的一种具有卸盘翻盘卸料上架功能的工业机器人的结构示意图;
13.图2为本实用新型提出的一种具有卸盘翻盘卸料上架功能的工业机器人的夹持机构的结构示意图。
14.图中:底座1、自锁万向轮2、第一电机3、转盘4、第一气缸5、第一连接臂6、第二连接臂7、第二气缸8、第二电机9、转轴10、夹持机构11、安装座 111、第三电机112、齿轮113、转动杆114、夹持座115。
具体实施方式
15.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
16.参照图1-2,一种具有卸盘翻盘卸料上架功能的工业机器人,包括底座1,底座1的底部转动安装有若干自锁万向轮2,自锁万向轮2用于整体的移动;底座1的底部固定安装有第一电机3,底座1的顶部转动安装有转盘4,第一电机 3用于带动转盘4转动;第一电机3的输出轴与转盘4固定连接,转盘4的顶部铰接有第一连接臂6,转盘4的顶部还铰接有第一气缸5,第一气缸5的输出端与第一连接臂6的侧壁铰接,第一连接臂6的顶部铰接有第二连接臂7,第二连接臂7与第一连接臂6之间安装有第二气缸8,第二气缸8铰接在第一连接臂6 上,第二气缸8的输出端与第二连接臂7的侧壁铰接,第二连接臂7的一端固定安装有第二电机9,第二连接臂7的内侧转动安装有贯穿的转轴10,第二电机9的输出端与转轴10固定连接。
17.通过第一电机3驱动转盘4转动,从而调整体的水平角度;通过控制第一气缸5使得第一连接臂6转动,从而调整第二连接臂7的高度。
18.转轴10的端部安装有夹持机构11,夹持机构11包括安装座111,安装座 111的内侧转动安装有两个齿轮113,两个齿轮113相互啮合,安装座111的顶部固定安装有第三电机112,第三电机112的输出轴与相应的齿轮113固定连接,两个齿轮113上均同轴固定安装有转动杆114,两个转动杆114远离相应的齿轮 113的一端均固定安装有夹持座115,两个夹持座115可相互配合,夹持座115 用于夹取料盘。
19.通过控制第二电机9使得安装座111转动,从而实现料盘的翻转;通过第三电机112使得其中一个齿轮113转动,进而使得两个转动杆114相向转动,也就使得夹持座115对料盘进行夹持;通过控制第二气缸8使得第二连接臂7 转动,从而控制料盘的纵向角度进行卸料,整个过程完全通过一个机器人实现,大大提高了生产效率。
20.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范
围之内。
技术特征:
1.一种具有卸盘翻盘卸料上架功能的工业机器人,包括底座(1),所述底座(1)的底部转动安装有若干自锁万向轮(2),其特征在于,所述底座(1)的底部固定安装有第一电机(3),所述底座(1)的顶部转动安装有转盘(4),所述第一电机(3)的输出轴与转盘(4)固定连接,所述转盘(4)的顶部铰接有第一连接臂(6),所述转盘(4)的顶部还铰接有第一气缸(5),所述第一气缸(5)的输出端与第一连接臂(6)的侧壁铰接,所述第一连接臂(6)的顶部铰接有第二连接臂(7),所述第二连接臂(7)与第一连接臂(6)之间安装有第二气缸(8),所述第二气缸(8)铰接在第一连接臂(6)上,所述第二气缸(8)的输出端与第二连接臂(7)的侧壁铰接。2.根据权利要求1所述的一种具有卸盘翻盘卸料上架功能的工业机器人,其特征在于,所述第二连接臂(7)的一端固定安装有第二电机(9),所述第二连接臂(7)的内侧转动安装有贯穿的转轴(10),所述第二电机(9)的输出端与转轴(10)固定连接。3.根据权利要求2所述的一种具有卸盘翻盘卸料上架功能的工业机器人,其特征在于,所述转轴(10)的端部安装有夹持机构(11),所述夹持机构(11)包括安装座(111),所述安装座(111)的内侧转动安装有两个齿轮(113),两个所述齿轮(113)相互啮合。4.根据权利要求3所述的一种具有卸盘翻盘卸料上架功能的工业机器人,其特征在于,所述安装座(111)的顶部固定安装有第三电机(112),所述第三电机(112)的输出轴与相应的齿轮(113)固定连接。5.根据权利要求4所述的一种具有卸盘翻盘卸料上架功能的工业机器人,其特征在于,两个所述齿轮(113)上均同轴固定安装有转动杆(114),两个所述转动杆(114)远离相应的齿轮(113)的一端均固定安装有夹持座(115),两个所述夹持座(115)可相互配合。
技术总结
本实用新型涉及机器人技术领域,尤其是一种具有卸盘翻盘卸料上架功能的工业机器人,包括底座,底座的底部转动安装有若干自锁万向轮,底座的底部固定安装有第一电机,底座的顶部转动安装有转盘,第一电机的输出轴与转盘固定连接,转盘的顶部铰接有第一连接臂,转盘的顶部还铰接有第一气缸,第一气缸的输出端与第一连接臂的侧壁铰接,第一连接臂的顶部铰接有第二连接臂,第二连接臂与第一连接臂之间安装有第二气缸,第二气缸铰接在第一连接臂上,第二气缸的输出端与第二连接臂的侧壁铰接。本实用新型通过一个机器人实现翻转卸盘,大大提高了生产效率。了生产效率。了生产效率。
技术研发人员:李凯
受保护的技术使用者:山东沾化茂元化工有限公司
技术研发日:2021.09.16
技术公布日:2022/5/10
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1