一种方便高效的桁架机械手送料装置
1.本实用新型涉械手领域,具体是一种方便高效的桁架机械手送料装置。
背景技术:
2.桁架机械手是一种建立在直角三坐标系统基础上,对工件进行工位调整,或 实现工件的轨迹运动等功能的全自动工业设备,其控制核心通过工业控制器实现,其中,控制器可以是:可编程逻辑控制器、运动控制、单片机等,通过控制器对各种输入信号的分析处理,做出一定的逻辑判断后,对各个输出元件下达执行命令,完成三轴之间的联合运动,以此实现一整套的全自动作业流程。
3.但是,现有的桁架机械手送料需要一次一次的夹持运送,过程繁琐,增加了时间成本,降低了工作效率。
技术实现要素:
4.针对现有的问题,本实用新型提供一种方便高效的桁架机械手送料装置,该装置组件包括转动块、第一转轴、夹持机构配合使用可以有效的解决背景技术中提出的问题。
5.为解决上述问题,本实用新型采用如下的技术方案:
6.一种方便高效的桁架机械手送料装置,包括转动块,所述转动块的外侧连接有连接块,所述连接块的一侧设置有夹持机构,所述连接块与所述夹持机构之间设置有第三转轴,所述夹持机构的内部设置有活动圈,所述活动圈的内侧设置有夹持爪,所述夹持爪的侧表面设置有防滑软垫。
7.作为本实用新型再进一步的方案:所述转动块的中部连接有第一转轴,所述第一转轴位于远离所述转动块的一端设置有连杆,所述第一转轴与所述连杆之间设置有第二转轴,所述连杆位于远离所述第二转轴的一端连接有活动杆。
8.作为本实用新型再进一步的方案:所述转动块与所述连接块固定连接,所述连接块与所述第三转轴固定连接,所述夹持机构通过所述第三转轴与所述连接块转动连接,所述活动圈与所述夹持机构滑动连接,所述防滑软垫与所述夹持爪固定连接。
9.作为本实用新型再进一步的方案:第二转轴与所述第一转轴固定连接。
10.作为本实用新型再进一步的方案:所述第一转轴通过所述第二转轴与所述连杆转动连接。
11.作为本实用新型再进一步的方案:所述转动块与所述第一转轴转动连接。
12.作为本实用新型再进一步的方案:所述连杆与所述活动杆固定连接。
13.与现有技术相比,本实用新型的有益效果是:
14.1、通过在转动块的外侧设置多个加持机构,使桁架机械手可以同时夹取多个原料分别进行加工,避免桁架机械手反复移动夹取原料从而加快机器的损耗,节约了时间成本,提高了桁架机械手的工作效率。
15.2、通过活动圈在夹持机构上下滑动,控制夹持爪的开合,提高了夹持爪运动的稳
定性,通过在夹持爪的一侧设置防滑软垫,避免桁架机械手原料从夹持爪中滑落,造成原料的浪费或机器的损坏。
附图说明
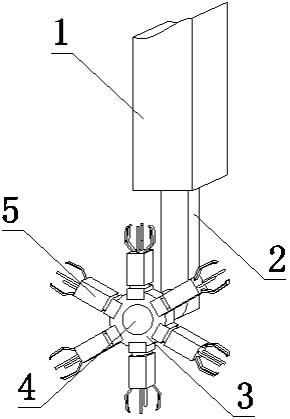
16.图1为一种方便高效的桁架机械手送料装置的结构示意图;
17.图2为一种方便高效的桁架机械手送料装置的侧视图;
18.图3为一种方便高效的桁架机械手送料装置中加持机构的剖视图。
19.图中:1、活动杆;2、连杆;3、转动块;4、第一转轴;5、夹持机构;6、第二转轴;501、夹持爪;502、防滑软垫;503、活动圈;504、第三转轴;505、连接块。
具体实施方式
20.下面结合具体实用新型对本实用新型进一步进行描述。
21.如图1-3所示,在本实施例中,结合图1至图3说明本实施方式,本实施方式提供了一种方便高效的桁架机械手送料装置,包括活动杆1,活动杆1的下方连接有连杆2,当活动杆1运动时,活动杆1带动连杆2运动,连杆2的下方设置有第一转轴4,第一转轴4与连杆2之间连接有第二转轴6,第一转轴4与第二转轴6固定连接,第一转轴4通过第二转轴6在连杆2的一侧转动。
22.如图1、2、3所示,第一转轴4的一端安装有转动块3,转动块3可以在第一转轴4的外侧任意转动,转动块3的侧面连接有连接块505,转动块3转动可以调整连接块505的位置,连接块505的一侧设置有夹持机构5,夹持机构5与连接块505之间设置有第三转轴504,夹持机构5可以通过第三转轴504在连接块505的一侧转动,夹持机构5的一端安装有夹持爪501,夹持爪501的外侧位于夹持机构5的内部设置有活动圈503,活动圈503在夹持机构5的内部上下运动可以控制夹持爪501的开合,夹持爪501的侧表面连接有防滑软垫502,避免桁架机械手原料从夹持爪501中滑落,
23.本实用新型的工作原理是:当桁架机械手需要移动多个原料时,控制活动杆1运动到原料上方,活动圈503在夹持机构5的内部朝连接块505方向运动,使活动圈503停止对夹持爪501外部的限位,此时夹持爪501松开,当接触原料后活动圈503朝远离连接块505的一侧运动,使活动圈503限制夹持爪501的运动,防滑软垫502与原料接触,夹紧原料避免桁架机械手原料从夹持爪中滑落,造成原料的浪费或机器的损坏,转动块3在第一转轴4外侧转动,调整位置使转动块3外侧的夹持爪501同时夹持多个原料,对原料进行夹持后,控制活动杆1移动到需要放置原料的地方,活动圈503朝远离连接块505的一侧运动,使夹持爪501松开停止对原料的夹持,夹持机构5可以通过第三转轴504在连接块505的一侧转动,方便原料调整放置角度,第一转轴4的一端与第二转轴6相连,使转动块3可以带动夹持机构5多角度运动,更加方便原料的移动和放置,避免桁架机械手反复移动夹取原料从而加快机器的损耗,节约了时间成本,提高了桁架机械手的工作效率。
24.以上所述的,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
技术特征:
1.一种方便高效的桁架机械手送料装置,包括转动块(3),其特征在于,所述转动块(3)的外侧连接有连接块(505),所述连接块(505)的一侧设置有夹持机构(5),所述连接块(505)与所述夹持机构(5)之间设置有第三转轴(504),所述夹持机构(5)的内部设置有活动圈(503),所述活动圈(503)的内侧设置有夹持爪(501),所述夹持爪(501)的侧表面设置有防滑软垫(502)。2.根据权利要求1所述的一种方便高效的桁架机械手送料装置,其特征在于,所述转动块(3)的中部连接有第一转轴(4),所述第一转轴(4)位于远离所述转动块(3)的一端设置有连杆(2),所述第一转轴(4)与所述连杆(2)之间设置有第二转轴(6),所述连杆(2)位于远离所述第二转轴(6)的一端连接有活动杆(1)。3.根据权利要求1所述的一种方便高效的桁架机械手送料装置,其特征在于,所述转动块(3)与所述连接块(505)固定连接,所述连接块(505)与所述第三转轴(504)固定连接,所述夹持机构(5)通过所述第三转轴(504)与所述连接块(505)转动连接,所述活动圈(503)与所述夹持机构(5)滑动连接,所述防滑软垫(502)与所述夹持爪(501)固定连接。4.根据权利要求2所述的一种方便高效的桁架机械手送料装置,其特征在于,所述第二转轴(6)与所述第一转轴(4)固定连接。5.根据权利要求2所述的一种方便高效的桁架机械手送料装置,其特征在于,所述第一转轴(4)通过所述第二转轴(6)与所述连杆(2)转动连接。6.根据权利要求2所述的一种方便高效的桁架机械手送料装置,其特征在于,所述转动块(3)与所述第一转轴(4)转动连接。7.根据权利要求2所述的一种方便高效的桁架机械手送料装置,其特征在于,所述连杆(2)与所述活动杆(1)固定连接。
技术总结
本实用新型涉及桁架机械手领域,具体公开了一种方便高效的桁架机械手送料装置,包括转动块,所述转动块的外侧连接有连接块,所述连接块的一侧设置有夹持机构,所述连接块与所述夹持机构之间设置有第三转轴,所述夹持机构的内部设置有活动圈,所述活动圈的内侧设置有夹持爪,所述夹持爪的侧表面设置有防滑软垫。通过在转动块的外侧设置多个夹持机构,使桁架机械手可以同时夹取多个原料分别进行加工,避免桁架机械手反复移动夹取原料加快机器的损耗,提高了桁架机械手的工作效率,通过活动圈在夹持机构上下滑动,控制夹持爪的开合,提高了夹持爪运动的稳定,通过在夹持爪的一侧设置防滑软垫,避免桁架机械手原料从夹持爪中滑落,造成原料的浪费或机器的损坏。成原料的浪费或机器的损坏。成原料的浪费或机器的损坏。
技术研发人员:赵海彬
受保护的技术使用者:江苏安全技术职业学院
技术研发日:2021.10.20
技术公布日:2022/3/22
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1