一种新型搬运机器人的制作方法
1.本实用新型涉及机器人技术领域,尤其涉及一种新型搬运机器人。
背景技术:
2.在生产中的工件在进行工位转运时通常使用搬运机器人对其搬运,随着工件精密程度的上升,对于搬运时的精度也随之上升;同时为了提高搬运的稳定性,搬运机器人在进行搬运动作时对工件的移动速度变化速率有很高的要求;目前搬运机器人主要存在搬运移动精度差,使得搬运工作无法应用在对工件位置精度较高的领域。
技术实现要素:
3.实用新型目的:为了克服现有技术中存在的不足,本实用新型提供一种新型搬运机器人可以有效确保搬运往复动作的距离保持相等,保证搬运夹持位置的精确度。
4.技术方案:为实现上述目的,本实用新型的一种新型搬运机器人,包括立柱、z轴滑板和x轴悬臂;所述z轴滑板轨道连接于立柱顶端,所述立柱设置z轴伺服电机驱动连接于z轴滑板,所述x轴悬臂固定连接于z轴滑板,所述x轴悬臂包括x轴伺服电机、减速机、第一传动轮、传动轮组、第二传动轮、第一同步带和第二同步带;所述x轴伺服电机通过减速机驱动连接于第一传动轮,所述第一传动轮设于x轴悬臂中间位置,所述传动轮组设于x轴悬臂的一端,所述第一传动轮通过第一同步带传动连接于传动轮组的上轮端,所述传动轮组的下轮端通过第二同步带传动连接于第二传动轮,所述第二传动轮设于x轴悬臂的另一端,所述第二传动轮驱动连接于x轴滑板,所述x轴滑板轨道连接于x轴悬臂。
5.进一步地,所述传动轮组包括上轮、下轮、轴体和轴承;所述上轮和下轮分别轴承连接于轴体的上下两端,所述轴体插设于轴承,所述轴承连接于x轴悬臂。
6.进一步地,所述x轴滑板上表面设有导架,所述导架设有导槽,所述导槽连接于x轴悬臂的导轨。
7.进一步地,所述x轴滑板设有刷板夹,所述刷板夹夹设于第二同步带,所述刷板夹的夹合间距可通过螺栓调节。
8.有益效果:本实用新型的一种新型搬运机器人可以有效确保搬运往复动作的距离保持相等,保证搬运夹持位置的精确度,包括但不限于以下技术效果:
9.1)将第一同步带设置在从x轴悬臂的一端到中点位置,第二同步带长度为第一同步带的两倍,形成半程和全程两种同步带,通过第一同步带和第二同步带配合可以使x轴左右行程相同,保证工件移动距离的精度;
10.2)设置刷板夹可以调整第二同步带形态避免变形,同时可以滤除异物。
附图说明
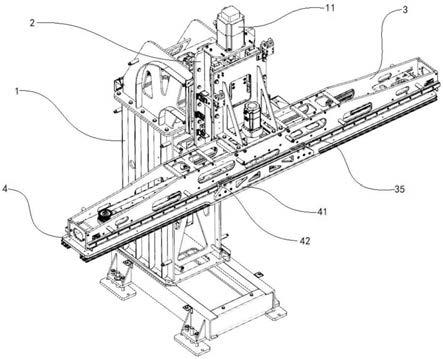
11.附图1为本实用新型的结构图;
12.附图2为本实用新型的同步带的结构图;
13.附图3为本实用新型的传动轮组的结构图。
具体实施方式
14.下面结合附图对本实用新型作更进一步的说明。
15.如附图1-3:一种新型搬运机器人,包括立柱1、z轴滑板2和x轴悬臂3;所述z轴滑板2轨道连接于立柱1顶端,所述立柱1设置z轴伺服电机11驱动连接于z轴滑板2,所述x轴悬臂3固定连接于z轴滑板2,所述x轴悬臂3包括x轴伺服电机31、减速机32、第一传动轮321、传动轮组322、第二传动轮323、第一同步带33和第二同步带34;所述x轴伺服电机31通过减速机32驱动连接于第一传动轮321,所述第一传动轮321设于x轴悬臂3中间位置,所述传动轮组322设于x轴悬臂3的一端,所述第一传动轮321通过第一同步带33传动连接于传动轮组322的上轮端,所述传动轮组322的下轮端通过第二同步带34传动连接于第二传动轮323,所述第二传动轮323设于x轴悬臂3的另一端,所述第二传动轮323驱动连接于x轴滑板4,所述x轴滑板4轨道连接于x轴悬臂3;x轴滑板4可安装夹持工件的夹具,并可将工件进行上下左右两轴方向移动,对工件进行搬运;设备中所采用的电机为高精度伺服电机,减速机32采用高精度行星减速机,所能达到的精度为3弧分;第一同步带33从x轴悬臂3的一端到中点位置,第二同步带34长度为第一同步带33的两倍,形成半程和全程两种同步带,通过第一同步带33和第二同步带34配合可以使x轴左右行程相同,保证工件移动距离的精度;通过减速机32直连同步带,减小了速比值,提高了提速效率。
16.所述传动轮组322包括上轮51、下轮52、轴体53和轴承54;所述上轮51和下轮52分别轴承连接于轴体53的上下两端,所述轴体53插设于轴承54,所述轴承54连接于x轴悬臂3。
17.所述x轴滑板4上表面设有导架41,所述导架41设有导槽42,所述导槽42连接于x轴悬臂3的导轨35。
18.所述x轴滑板4设有刷板夹43,所述刷板夹43夹设于第二同步带34,所述刷板夹43的夹合间距可通过螺栓调节;刷板夹43可以调整第二同步带34形态避免变形,同时可以滤除异物。
19.以上所述仅是本实用新型的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
技术特征:
1.一种新型搬运机器人,其特征在于:包括立柱(1)、z轴滑板(2)和x轴悬臂(3);所述z轴滑板(2)轨道连接于立柱(1)顶端,所述立柱(1)设置z轴伺服电机(11)驱动连接于z轴滑板(2),所述x轴悬臂(3)固定连接于z轴滑板(2),所述x轴悬臂(3)包括x轴伺服电机(31)、减速机(32)、第一传动轮(321)、传动轮组(322)、第二传动轮(323)、第一同步带(33)和第二同步带(34);所述x轴伺服电机(31)通过减速机(32)驱动连接于第一传动轮(321),所述第一传动轮(321)设于x轴悬臂(3)中间位置,所述传动轮组(322)设于x轴悬臂(3)的一端,所述第一传动轮(321)通过第一同步带(33)传动连接于传动轮组(322)的上轮端,所述传动轮组(322)的下轮端通过第二同步带(34)传动连接于第二传动轮(323),所述第二传动轮(323)设于x轴悬臂(3)的另一端,所述第二传动轮(323)驱动连接于x轴滑板(4),所述x轴滑板(4)轨道连接于x轴悬臂(3)。2.根据权利要求1所述的一种新型搬运机器人,其特征在于:所述传动轮组(322)包括上轮(51)、下轮(52)、轴体(53)和轴承(54);所述上轮(51)和下轮(52)分别轴承连接于轴体(53)的上下两端,所述轴体(53)插设于轴承(54),所述轴承(54)连接于x轴悬臂(3)。3.根据权利要求1所述的一种新型搬运机器人,其特征在于:所述x轴滑板(4)上表面设有导架(41),所述导架(41)设有导槽(42),所述导槽(42)连接于x轴悬臂(3)的导轨(35)。4.根据权利要求1所述的一种新型搬运机器人,其特征在于:所述x轴滑板(4)设有刷板夹(43),所述刷板夹(43)夹设于第二同步带(34),所述刷板夹(43)的夹合间距可通过螺栓调节。
技术总结
本实用新型公开了一种新型搬运机器人,包括立柱、Z轴滑板和X轴悬臂;所述Z轴滑板轨道连接于立柱顶端,所述立柱设置Z轴伺服电机驱动连接于Z轴滑板,所述X轴悬臂固定连接于Z轴滑板,所述X轴悬臂包括X轴伺服电机、减速机、第一传动轮、传动轮组、第二传动轮、第一同步带和第二同步带;所述X轴伺服电机通过减速机驱动连接于第一传动轮,所述第一传动轮设于X轴悬臂中间位置,所述传动轮组设于X轴悬臂的一端,所述第一传动轮通过第一同步带传动连接于传动轮组的上轮端,所述传动轮组的下轮端通过第二同步带传动连接于第二传动轮,所述第二传动轮设于X轴悬臂的另一端,所述第二传动轮驱动连接于X轴滑板,所述X轴滑板轨道连接于X轴悬臂。所述X轴滑板轨道连接于X轴悬臂。所述X轴滑板轨道连接于X轴悬臂。
技术研发人员:赵宇
受保护的技术使用者:无锡鑫金雨智能制造有限公司
技术研发日:2021.10.29
技术公布日:2022/4/21
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1