一种蠕动泵夹管机械手组件的制作方法
1.本实用新型涉及蠕动泵技术领域,尤其是涉及一种蠕动泵夹管机械手组件。
背景技术:
2.现有蠕动泵均是通过人工触摸开启、关闭按键,实现夹管机械手的开启与关闭,当蠕动管安装不到位或出现倾斜时,蠕动泵控制系统不能提示操作者,导致蠕动泵启动后,蠕动泵滚轮组件与蠕动管卡死,无法正常工作,甚至使蠕动泵过载、损坏。
技术实现要素:
3.本实用新型提供一种蠕动泵夹管机械手组件,以克服现有技术的不足。
4.本实用新型所采用的技术方案是:一种蠕动泵夹管机械手组件,包括夹管机械手,所述夹管机械手包括左右对称布置的两个夹管手臂,且两个夹管手臂的后端通过固定板连接固定在一起,所述夹管手臂的侧壁上铰接有触动臂,且触动臂的前端伸入夹管手臂前端的蠕动管安装槽中,触动臂的后端自内向外设有第一挡板和第二挡板;所述触动臂的上方固定有光电开关,当夹管机械手关闭到位后,第一挡板随夹管机械手向后移动遮挡光电开关的光束口;当夹管机械手开启到位后,第二挡板随夹管机械手向前移动遮挡光电开关的光束口,当蠕动管安装槽中蠕动管安装到位后,触动臂的前端被蠕动管挤压,使触动臂绕铰接点逆时针旋转,进而使第一挡板、第二挡板均向前倾斜一定角度,使光电开关的光束口在夹管机械手开启到位后不被第二挡板遮挡;当夹管机械手再次关闭到位后,光电开关的光束口不被第一挡板遮挡。
5.所述触动臂的前部为片状触头、后部为片状摆臂、中部通过铰接点与夹管手臂的侧壁铰接;所述片状触头的前端伸入夹管手臂前端的蠕动管安装槽中,所述片状摆臂的顶端分别延伸有第一挡板和第二挡板,且第一挡板和第二挡板位于夹管手臂的上方;所述光电开关为槽型结构,所述第一挡板和第二挡板可自所述槽型结构中穿过。
6.所述触动臂的重心位于其铰接点的后方,通过片状摆臂的尾部下端搭在固定板的顶端使触动臂的初始位置呈水平状态。
7.所述第一挡板的后侧具有透光凹槽,所述第二挡板位于片状摆臂的尾端,且片状摆臂的尾端具有台肩,且台肩可搭在固定板的顶端。
8.相较于现有技术,本实用新型具有的有益效果:
9.1、本实用新型通过在蠕动泵夹管机械手上加装一个杠杆式触动臂,并通过杠杆式触动臂与光电开关配合实现了蠕动管安装是否到位的检测功能,并通过光电开关将检测信号传输给蠕动泵控制系统,再通过蠕动泵控制系统提示操作者或控制蠕动泵夹管机械手下一个动作是否执行,解决了因蠕动管安装不到位或倾斜导致蠕动泵不能正常工作甚至损坏的问题,延长了蠕动泵使用寿命。
10.2、本实用新型结构简单实用,成本低廉,且触动臂与光电开关不接触,相互无影响,性能可靠稳定,提高了蠕动泵的自动化程度。
附图说明
11.图1是本实用新型未夹管时关闭到位结构示意图;
12.图2是本实用新型夹管时关闭到位结构示意图;
13.图3是本实用新型未夹管时开启到位结构示意图;
14.图4是本实用新型夹管时开启到位结构示意图;
15.图5是本实用新型触动臂结构示意图。
具体实施方式
16.下面结合附图1-5和具体实施方式对本实用新型进行详细说明。
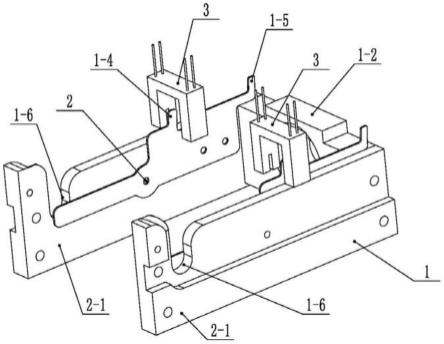
17.一种蠕动泵夹管机械手组件,包括夹管机械手1,所述夹管机械手1包括左右对称布置的两个夹管手臂1-1,且两个夹管手臂1-1的后端通过固定板1-2连接固定在一起。两个夹管手臂1-1的内侧壁上均铰接有对称布置的触动臂2,且触动臂2的前端伸入夹管手臂1-1前端的蠕动管安装槽1-3中,触动臂2的后端自内向外设有第一挡板1-4和第二挡板1-5;所述触动臂2的上方固定有光电开关3,当夹管机械手1关闭到位后,第一挡板1-4随夹管机械手1向后移动遮挡光电开关3的光束口;当夹管机械手1开启到位后,第二挡板1-5随夹管机械手1向前移动遮挡光电开关3的光束口,当蠕动管安装槽1-3中蠕动管4安装到位后,触动臂2的前端被蠕动管4挤压,使触动臂2绕铰接点逆时针旋转,进而使第一挡板1-4、第二挡板1-5均向前倾斜一定角度,使光电开关3的光束口在夹管机械手1开启到位后不被第二挡板1-5遮挡;当夹管机械手1再次关闭到位后,光电开关3的光束口不被第一挡板1-4遮挡。
18.在一种实施例中,所述触动臂2的前部为片状触头2-1、后部为片状摆臂2-2、中部通过铰接点2-3与夹管手臂1-1的侧壁铰接;所述片状触头2-1的前端伸入夹管手臂1-1前端的蠕动管安装槽1-3中,所述片状摆臂2-2的顶端分别延伸有第一挡板1-4和第二挡板1-5,且第一挡板1-4和第二挡板1-5位于夹管手臂1-1的上方;所述光电开关3为槽型结构,所述第一挡板1-4和第二挡板1-5可自所述槽型结构中穿过。
19.优选的,所述触动臂2的重心位于其铰接点2-3的后方,片状摆臂2-2的尾端具有台肩1-7,且台肩1-7可搭在固定板1-2的顶端,通过片状摆臂2-2的尾部下端搭在固定板1-2的顶端使触动臂2的初始位置呈水平状态,保证触动臂2的初始位置一致。
20.优选的,所述第一挡板1-4的后侧具有透光凹槽1-6,所述第二挡板1-5位于片状摆臂2-2的尾端,保证第一挡板1-4、第二挡板1-5向前倾斜后光电开关3的光束口不被遮挡。
21.具体应用时,所述光电开关3与蠕动泵控制系统电连接,通过蠕动泵控制系统显示或提示夹管机械手1是否关闭到位、开启到位以及蠕动管4是否安装到位。
22.工作原理:蠕动泵在待机状态时,夹管机械手1处于关闭状态,第一挡板1-4遮挡光电开关3的光束口,光电开关3输出一个电信号给蠕动泵控制系统显示或提示可开启夹管机械手1;当夹管机械手1开启到位后,第二挡板1-5遮挡光电开关3的光束口,光电开关3输出一个电信号给蠕动泵控制系统显示或提示可安装蠕动管4;当蠕动管安装槽1-3中蠕动管4安装到位后,使第一挡板1-4、第二挡板1-5均向前倾斜一定角度,第二挡板1-5不再遮挡光电开关3的光束口,光电开关3输出一个反向电信号给蠕动泵控制系统显示或提示蠕动管4安装到位,可关闭夹管机械手1,夹管机械手1再次关闭到位后,第一挡板1-4不在遮挡光电开关3的光束口,光电开关3再输出一个反向电信号给蠕动泵控制系统显示或提示蠕动管4
夹持到位,蠕动泵可开始工作。
23.本实用新型通过对蠕动管4夹持段两端是否安装到位、夹持到位进行监测,并将检测信号传输至蠕动泵控制系统,防止蠕动管安装倾斜,只有当蠕动管4夹持段两端均安装到位、夹持到位时,蠕动泵控制系统才会启动蠕动泵开始工作。
24.上述实施例,只是本实用新型的较佳实施例,并非用来限制本实用新型的实施范围,故凡以本实用新型权利要求所述内容所做的等同变化,均应包括在本实用新型权利要求范围之内。
技术特征:
1.一种蠕动泵夹管机械手组件,包括夹管机械手(1),所述夹管机械手(1)包括左右对称布置的两个夹管手臂(1-1),且两个夹管手臂(1-1)的后端通过固定板(1-2)连接固定在一起,其特征在于:所述夹管手臂(1-1)的侧壁上铰接有触动臂(2),且触动臂(2)的前端伸入夹管手臂(1-1)前端的蠕动管安装槽(1-3)中,触动臂(2)的后端自内向外设有第一挡板(1-4)和第二挡板(1-5);所述触动臂(2)的上方固定有光电开关(3),当夹管机械手(1)关闭到位后,第一挡板(1-4)随夹管机械手(1)向后移动遮挡光电开关(3)的光束口;当夹管机械手(1)开启到位后,第二挡板(1-5)随夹管机械手(1)向前移动遮挡光电开关(3)的光束口,当蠕动管安装槽(1-3)中蠕动管(4)安装到位后,触动臂(2)的前端被蠕动管(4)挤压,使触动臂(2)绕铰接点逆时针旋转,进而使第一挡板(1-4)、第二挡板(1-5)均向前倾斜一定角度,使光电开关(3)的光束口在夹管机械手(1)开启到位后不被第二挡板(1-5)遮挡;当夹管机械手(1)再次关闭到位后,光电开关(3)的光束口不被第一挡板(1-4)遮挡。2.根据权利要求1所述的一种蠕动泵夹管机械手组件,其特征在于:所述触动臂(2)的前部为片状触头(2-1)、后部为片状摆臂(2-2)、中部通过铰接点(2-3)与夹管手臂(1-1)的侧壁铰接;所述片状触头(2-1)的前端伸入夹管手臂(1-1)前端的蠕动管安装槽(1-3)中,所述片状摆臂(2-2)的顶端分别延伸有第一挡板(1-4)和第二挡板(1-5),且第一挡板(1-4)和第二挡板(1-5)位于夹管手臂(1-1)的上方;所述光电开关(3)为槽型结构,所述第一挡板(1-4)和第二挡板(1-5)可自所述槽型结构中穿过。3.根据权利要求2所述的一种蠕动泵夹管机械手组件,其特征在于:所述触动臂(2)的重心位于其铰接点(2-3)的后方,通过片状摆臂(2-2)的尾部下端搭在固定板(1-2)的顶端使触动臂(2)的初始位置呈水平状态。4.根据权利要求3所述的一种蠕动泵夹管机械手组件,其特征在于:所述第一挡板(1-4)的后侧具有透光凹槽(1-6),所述第二挡板(1-5)位于片状摆臂(2-2)的尾端,且片状摆臂(2-2)的尾端具有台肩(1-7),且台肩(1-7)可搭在固定板(1-2)的顶端。
技术总结
一种蠕动泵夹管机械手组件,包括夹管机械手,夹管机械手包括左右对称布置的两个夹管手臂,且两个夹管手臂的后端通过固定板连接在一起,夹管手臂的侧壁上铰接有触动臂,且触动臂的前端伸入夹管手臂前端的蠕动管安装槽中,触动臂的后端自内向外设有第一挡板和第二挡板;触动臂的上方固定有光电开关;第一挡板挡遮光电开关的光束口时夹管机械手关闭,随夹管机械手的前移动使第二挡板遮挡光电开关的光束口,夹管机械手开启;安装蠕动管在蠕动管安装槽中挤压触动臂,使触动臂绕铰接点逆时针旋转,使光电开关的光束口在夹管机械手开启到位后不被第二挡板遮挡;管机械手再次关闭,光电开关的光束口不被第一挡板遮挡。本实用新型以克服现有技术的不足。现有技术的不足。现有技术的不足。
技术研发人员:罗淑文
受保护的技术使用者:罗淑文
技术研发日:2021.11.26
技术公布日:2022/6/9
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1